基于人工免疫算法的載人登月任務(wù)地月轉(zhuǎn)移雙脈沖中止策略研究
2014-07-25 11:29:34果琳麗向開恒
載人航天 2014年2期
關(guān)鍵詞:策略
彭 坤,果琳麗,向開恒,王 平,楊 雷
(中國(guó)空間技術(shù)研究院載人航天總體部,北京100094)
基于人工免疫算法的載人登月任務(wù)地月轉(zhuǎn)移雙脈沖中止策略研究
彭 坤,果琳麗,向開恒,王 平,楊 雷
(中國(guó)空間技術(shù)研究院載人航天總體部,北京100094)
載人登月任務(wù)中,任務(wù)中止策略設(shè)計(jì)是確保航天員安全返回的重要基礎(chǔ)。首先結(jié)合“星座”計(jì)劃飛行方案分析了載人登月任務(wù)各飛行階段的中止策略;其次針對(duì)地月轉(zhuǎn)移巡航段進(jìn)行了雙脈沖中止策略設(shè)計(jì),以速度增量數(shù)值、方位角以及變軌時(shí)間間隔為控制變量,加入軌道同向、近地點(diǎn)高度、偏心率以及飛行時(shí)間約束,提出雙脈沖變軌計(jì)算流程;最后采用人工免疫算法對(duì)該問題進(jìn)行了求解和優(yōu)化。仿真算例表明,雙脈沖中止策略存在多組解,其全局分布特性為:飛行時(shí)間越短速度增量需求越大;飛行時(shí)間相近時(shí),大偏心率中止軌道對(duì)應(yīng)的速度增量小;故障點(diǎn)離地月加速點(diǎn)越近,所需速度增量越小。同時(shí)也驗(yàn)證了人工免疫算法求解雙脈沖中止策略問題的有效性。
載人登月;中止策略;雙脈沖;人工免疫算法
1 引言
載人登月工程是一項(xiàng)復(fù)雜度大、技術(shù)含量和風(fēng)險(xiǎn)性極高的大系統(tǒng)工程,保障航天員安全是載人登月工程設(shè)計(jì)的重要原則。在載人登月飛行過程中如果飛行器發(fā)生故障威脅到航天員的生命安全,航天員可以通過預(yù)先設(shè)計(jì)的策略隨時(shí)中止任務(wù),安全返回地球。
美國(guó)對(duì)載人登月任務(wù)中止策略進(jìn)行過大量分析工作[1-8]。國(guó)內(nèi)學(xué)者黃文德等[9,10]對(duì)載人登月所涉及的登月軌道設(shè)計(jì)和任務(wù)中止軌道設(shè)計(jì)問題進(jìn)行了研究,陳海萍[11]和郗曉寧[12]等分別對(duì)載人登月任務(wù)中止軌道問題進(jìn)行了綜述。
本文在上述研究成果的基礎(chǔ)上,首先以“星座”計(jì)劃的飛行模式為例,分析載人登月任務(wù)各飛行階段的任務(wù)中止策略。重點(diǎn)對(duì)雙脈沖變軌的地月轉(zhuǎn)移任務(wù)中止軌道進(jìn)行建模和仿真優(yōu)化。最后,結(jié)合仿真算例總結(jié)雙脈沖任務(wù)中止策略的特點(diǎn),對(duì)載人登月任務(wù)地月轉(zhuǎn)移中止策略設(shè)計(jì)提出建議,為未來(lái)載人登月工程實(shí)施提供參考。
2 載人登月飛行過程及中止策略分析
2.1 載人登月飛行過程簡(jiǎn)介
載人登月任務(wù)涉及多種類型軌道,飛行過程根據(jù)飛行模式不同而略有差異。美國(guó)的Apollo登月工程采用直接奔月飛行模式[13],其后“星座”計(jì)劃則采用近地軌道1次對(duì)接奔月飛行模式[14](圖1)。與直接奔月飛行模式相比,近地軌道1次對(duì)接奔月飛行模式雖增加了1次火箭發(fā)射和1次近地軌道交會(huì)對(duì)接,但采用人貨分運(yùn)方式,最大限度保障了航天員的安全。
以近地軌道1次對(duì)接奔月飛行模式為標(biāo)稱模式,載人飛行過程[14]可劃分為:載人發(fā)射段、近地軌道段(包括近地軌道交會(huì)對(duì)接段和地月轉(zhuǎn)移射入段)、地月轉(zhuǎn)移巡航段、環(huán)月軌道射入段、環(huán)月軌道段(包括月面下降段、環(huán)月飛行段、月面上升段和環(huán)月軌道交會(huì)對(duì)接段)、月地轉(zhuǎn)移射入段、月地轉(zhuǎn)移巡航段、再入返回段。
2.2 任務(wù)中止策略分析
載人登月各飛行階段的約束條件不同,應(yīng)根據(jù)各段任務(wù)特點(diǎn)可制定相應(yīng)任務(wù)中止策略,如表1所示。

表1 載人登月各飛行階段中止策略Tab le 1 Abort strategy in different phases of m anned lunar m issions
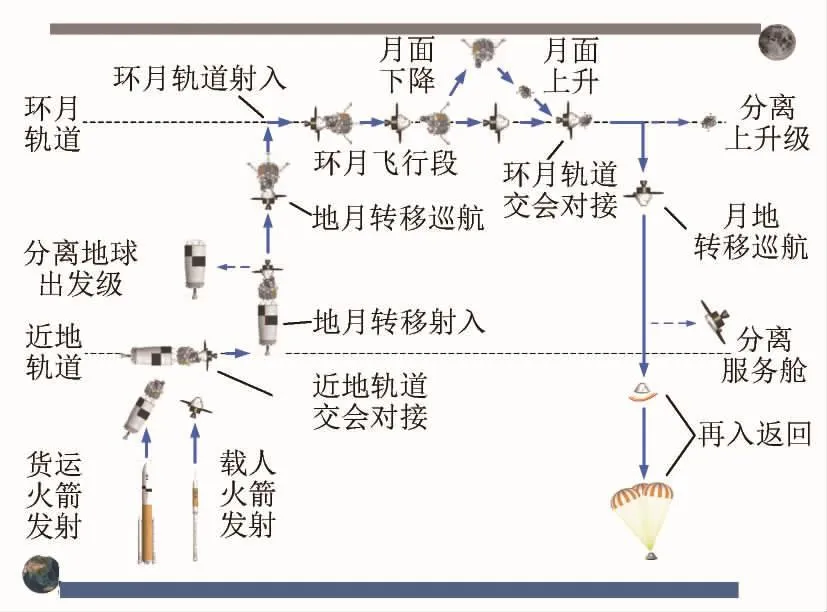
圖1 “星座”計(jì)劃飛行過程Fig.1 Flight profile of the Constellation program
由表1分析可知,任務(wù)中止策略的有效飛行階段主要集中在登月前的地月轉(zhuǎn)移、環(huán)月飛行以及月面下降段,登月后飛行階段的任務(wù)中止策略與標(biāo)稱任務(wù)類似。本文著重對(duì)其中地月轉(zhuǎn)移段中止策略進(jìn)行研究,由于繞月自由返回是載人登月地月轉(zhuǎn)移軌道的特性[13](圖2),故主要研究直接中止策略。
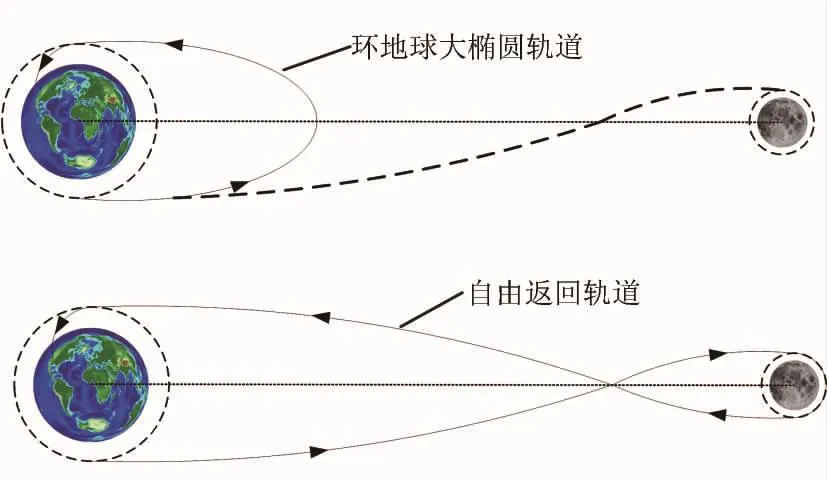
圖2 地月轉(zhuǎn)移巡航段中止軌道Fig.2 Abort trajectory for translunar coast
3 雙脈沖地月轉(zhuǎn)移中止策略設(shè)計(jì)
多脈沖變軌為地月轉(zhuǎn)移巡航段任務(wù)中止策略提供了一種選擇,可使登月飛行器在緊急情況下快速返回地球。但并不是脈沖數(shù)越多越好,脈沖數(shù)一般不應(yīng)超過四次[8]。本節(jié)以雙脈沖變軌為手段,進(jìn)行地月轉(zhuǎn)移巡航段任務(wù)中止策略設(shè)計(jì)。
3.1 雙脈沖變軌過程
雙脈沖變軌任務(wù)中止過程如圖3所示。
登月飛行器沿地月轉(zhuǎn)移軌道運(yùn)行至變軌點(diǎn)1時(shí)發(fā)生故障需要進(jìn)行任務(wù)中止,在變軌點(diǎn)1(非固定點(diǎn))施加脈沖Δv1進(jìn)入中止軌道1;經(jīng)過t12運(yùn)行至變軌點(diǎn)2時(shí)施加脈沖Δv2進(jìn)入中止軌道2;經(jīng)過t2R運(yùn)行至再入點(diǎn),再入角滿足約束條件,返回地面(圖3)。其中,ri,vi1,vi2,Δvi(i=1,2)分別表示變軌點(diǎn)i的位置矢量、變軌前的速度矢量、變軌后的速度矢量和變軌速度增量;rR,vR,γ分別表示再入點(diǎn)R的位置矢量、速度矢量和再入角。
3.2 控制變量設(shè)置
為簡(jiǎn)化計(jì)算,登月飛行器軌道按二體問題處理。由于拋物線軌道和雙曲線軌道容易飛離地球,從安全角度考慮,中止軌道均選為橢圓軌道。同時(shí)為節(jié)省燃料消耗,兩次變軌均設(shè)為平面內(nèi)變軌。設(shè)兩次變軌速度增量的模分別為Δv1和Δv2,與軌道坐標(biāo)系中X軸方向(徑向)的夾角分別為α1和α2(以X軸為起點(diǎn),逆時(shí)針旋轉(zhuǎn)至速度矢量方向),則兩次變軌速度增量在地心慣性系中可表示為公式(1)。

式(1)中,Mio1,Mio2分別為地月轉(zhuǎn)移軌道在變軌點(diǎn)1處和中止軌道1在變軌點(diǎn)2處從軌道系到慣性系的轉(zhuǎn)移矩陣,其表達(dá)式如式(2)。

式(2)中,Ω0,i0,ω0,θ02分別為地月轉(zhuǎn)移軌道在地心慣性系下的升交點(diǎn)赤經(jīng),軌道傾角,近地點(diǎn)幅角以及變軌點(diǎn)1處的真近點(diǎn)角;Ω1,i1,ω1,θ12分別為中止軌道1在地心慣性系下的升交點(diǎn)赤經(jīng),軌道傾角,近地點(diǎn)幅角以及變軌點(diǎn)2處的真近點(diǎn)角。R為單軸旋轉(zhuǎn)轉(zhuǎn)移矩陣,如RZ(-Ω0)表示繞Z軸旋轉(zhuǎn)-Ω0角度形成的坐標(biāo)轉(zhuǎn)移矩陣。
由以上分析可以通過Δv1,α1,Δv2,α2即可得出兩次變軌的速度增量矢量Δv1和Δv2,若再已知兩次變軌之間的間隔時(shí)間t12,即可計(jì)算出飛行器是否能再入地球。因此可設(shè)Δv1,α1,Δv2,α2和t12為兩脈沖中止策略變軌模型的控制變量。
3.3 約束設(shè)置
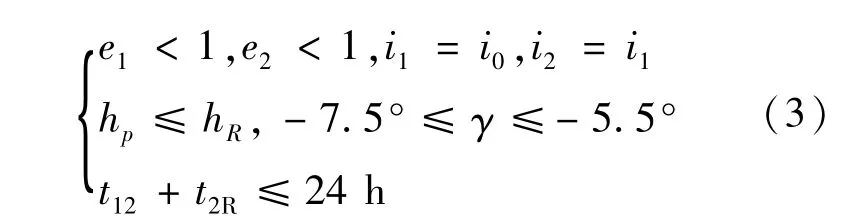
考慮到任務(wù)中止返回時(shí)間不宜過長(zhǎng),可設(shè)返回時(shí)間不超過24 h。為減少速度增量,要求中止軌道不能反向,即中止軌道傾角與原軌道保持一致。同時(shí)設(shè)中止軌道均為橢圓軌道,再入角γ滿足-7.5°≤γ≤-5.5°[4],近地點(diǎn)高度hP小于再入點(diǎn)高度hR。因此任務(wù)中止過程需滿足如式(3)所示約束條件。
3.4 評(píng)價(jià)指標(biāo)設(shè)置
在任務(wù)中止過程中,速度增量是需要重點(diǎn)考慮的因素,因此評(píng)價(jià)指標(biāo)J可設(shè)為式(4)的形式。J越大,任務(wù)中止速度增量越小,任務(wù)中止策略越好。當(dāng)任務(wù)中止過程不滿足約束條件時(shí),設(shè)置如式(4)所示懲罰項(xiàng),令J=-107。

式(4)中,fflag為任務(wù)中止是否滿足約束條件的標(biāo)識(shí),fflag=1表示滿足式(3),fflag=0表示不滿足。
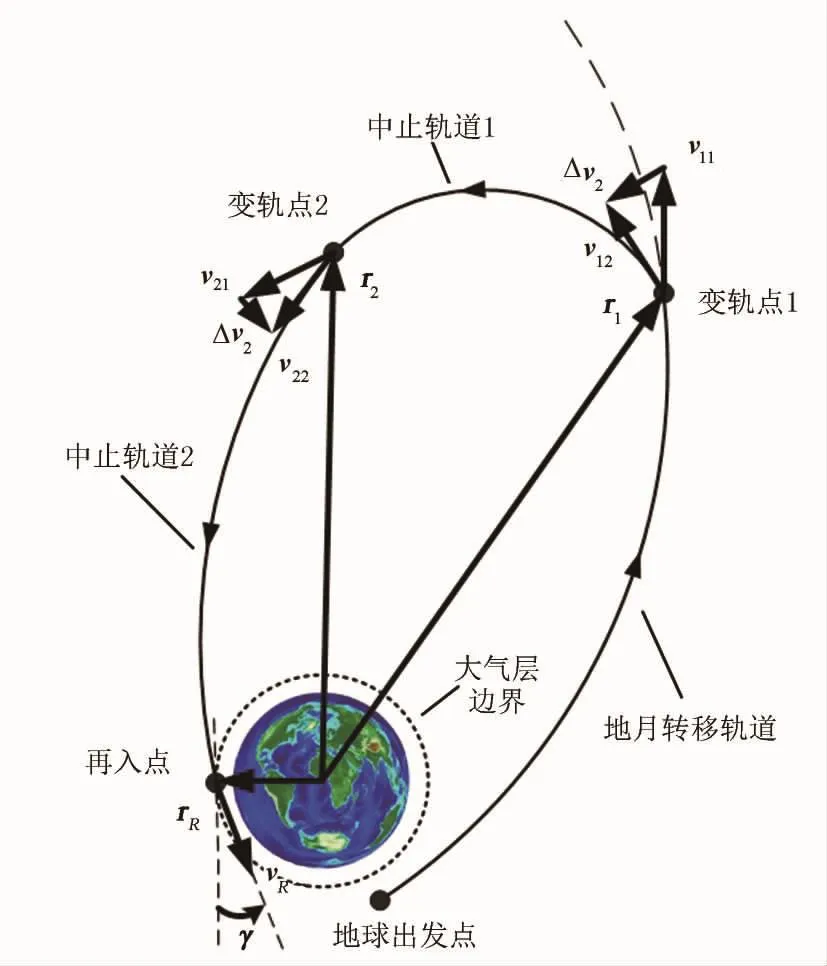
圖3 雙脈沖變軌任務(wù)中止策略示意圖Fig.3 Schematic diagram of two-impulse transfer for abort strategy
3.5 雙脈沖變軌計(jì)算流程
由控制變量計(jì)算評(píng)價(jià)指標(biāo)的流程如下:
1)由控制變量Δv1,α1,Δv2,α2分別求出兩次變軌的速度增量矢量Δv1和Δv2;
2)由初始條件v11和r1,以及變軌點(diǎn)1速度增量Δv1求出中止軌道1的軌道要素σ1(σ1=[a1,e1,i1,Ω1,ω1,θ1]),若e1≥1或i1≠i0,則令fflag=0,跳出;反之進(jìn)入下一步;
3)由σ1和t12進(jìn)行軌道推演求出變軌點(diǎn)2的速度位置矢量r2和v21;
4)由變軌點(diǎn)2的r2和v21,以及變軌點(diǎn)2速度增量Δv2求出中止軌道2的軌道要素σ2(σ2=[a2,e2,i2,Ω2,ω2,θ2]),若e2≥1或i2≠i1,則令fflag=0,跳出;反之進(jìn)入下一步;
5)由σ2可求出中止軌道2的近地點(diǎn)高度hp,若hp>hR(hR為大氣層邊界高度,一般取為120 km),則令fflag=0,跳出;反之計(jì)算再入點(diǎn)(hp= hR)處的真近點(diǎn)角θR,再由式(5)求出再入角γ;

6)若-7.5°≤γ≤-5.5°,則令fflag=1,記錄Δv1,α1,Δv2,α2和t12;反之,令fflag=0,跳出;
7)根據(jù)fflag值和式(4)計(jì)算評(píng)價(jià)指標(biāo)J。
該流程的優(yōu)點(diǎn)是在流程運(yùn)行過程中可迅速排除不可行解,減少計(jì)算量。
通過上一節(jié)推導(dǎo),已將雙脈沖任務(wù)中止問題轉(zhuǎn)化為帶約束條件的最優(yōu)化問題,需選用優(yōu)化算法進(jìn)行求解。人工免疫算法(Artificial Immune Algorithm,AIA)是一種新興的優(yōu)化算法[15],由Castro等人于2000年首次提出。它是模擬生物免疫系統(tǒng)智能行為而提出的仿生算法,具有尋優(yōu)成功率高、個(gè)體多樣性好的特點(diǎn)。
4.1 人工免疫算法原理
人工免疫算法[15]模擬生物免疫系統(tǒng),將待優(yōu)化的問題對(duì)應(yīng)抗原,可行解對(duì)應(yīng)抗體,可行解的質(zhì)量對(duì)應(yīng)抗體與抗原的親和度,將尋優(yōu)過程與生物免疫系統(tǒng)識(shí)別抗原并實(shí)現(xiàn)抗體進(jìn)化的過程對(duì)應(yīng)起來(lái),形成一種智能優(yōu)化算法。
4.2 人工免疫算法設(shè)計(jì)
按照人工免疫算法原理,可設(shè)計(jì)適合雙脈沖任務(wù)中止策略優(yōu)化的人工免疫算法:
1)計(jì)算親和度。由于AIA求解的是最優(yōu)問題的最大值,因此可將親和度f(wàn)aff(X)取為式(4)所示的形式。其中X為待優(yōu)化抗體,X=[Δv1,α1,Δv2,α2,t12]T。
2)計(jì)算濃度和激勵(lì)度。在尋優(yōu)過程中,AIA優(yōu)化算法對(duì)濃度過高的抗體進(jìn)行抑制以保持個(gè)體的多樣性。抗體濃度f(wàn)den(XI)計(jì)算方法如式(6)所示。

式(6)中,n為種群中抗體個(gè)數(shù),XI為種群中的第I個(gè)抗體,fbff(XI,Xi)為抗體XI與抗體Xi的相似度,其表達(dá)式如式(7)。

式(7)中,XI,j和Xi,j分別是抗體XI和抗體Xi的第j個(gè)變量,L為抗體個(gè)體的變量個(gè)數(shù)。
激勵(lì)度計(jì)算方法[15]如式(8)所示。
fsim(XI)=faff(XI)·exp(-a·fden(XI))(8)式(8)中,faff(XI)為抗體XI的評(píng)價(jià)函數(shù),也即親和度,fden(XI)為抗體XI的濃度,a為計(jì)算參數(shù),可根據(jù)實(shí)際情況確定。激勵(lì)度是對(duì)抗體質(zhì)量的最終評(píng)價(jià)結(jié)果,它綜合考慮了抗體的親和度和濃度。個(gè)體的親和度越大,濃度越小,激勵(lì)度越大。
3)免疫操作。首先根據(jù)激勵(lì)度進(jìn)行免疫選擇,然后進(jìn)行τ次克隆、變異操作,實(shí)現(xiàn)局部搜索。變異操作采用如式(9)所示規(guī)則。
式(9)中,XI,j,k是抗體XI的第k個(gè)克隆體的第j個(gè)變量;δ為定義的鄰域范圍;Pr是0和1之間的隨機(jī)數(shù);Pm為變異概率。最后進(jìn)行克隆抑制,找出變異后的抗體及源抗體中親和度最高的抗體AI替代源抗體XI,使得種群中抗體個(gè)數(shù)不變。
4)種群刷新。對(duì)激勵(lì)度低的抗體,AIA將進(jìn)行刪除并隨機(jī)生成新抗體Bi進(jìn)行替代。
5 仿真算例
1)仿真參數(shù)
(1)標(biāo)稱地月轉(zhuǎn)移軌道:以文獻(xiàn)[16]中的自由返回軌道為標(biāo)稱地月轉(zhuǎn)移軌道,其初始時(shí)刻軌道數(shù)據(jù)為a=265603.5064 km,e=0.97523,i= 28.7°,Ω=315.8013°,ω=326.7416°,θ=0°,t0=1Jan201512:00:00UTCG。
(2)控制變量:X=[Δv1,α1,Δv2,α2,t12],取值范圍為Δv1∈[0,2500](m/s),Δv2∈[0,2000](m/s),變軌方向應(yīng)與位置矢量反向,故可令α1,α2∈[π/2,3π/2],轉(zhuǎn)移時(shí)間在任務(wù)中止時(shí)間范圍內(nèi),故可令t12∈[1,24](h)。
4 優(yōu)化算法
(3)人工免疫算法參數(shù):種群個(gè)數(shù)N=1000,最大迭代代數(shù)Gmax=100,克隆規(guī)模τ=20,變異概率Pm=0.8。
2)算例1
設(shè)變軌點(diǎn)1(發(fā)生故障點(diǎn))時(shí)刻固定為t1= 1Jan201521:00:00UTCG,其地心慣性系下的位置速度矢量為r1=[16047300.7,100347590.4,45511891.2](m/s),v11=[-271.9,2233.3,772.8](m/s)。利用人工免疫算法進(jìn)行50次隨機(jī)優(yōu)化計(jì)算,PC性能為Intel Core 2.93 GHz處理器和2.0 GB內(nèi)存,計(jì)算總時(shí)間為8287.7 s,平均單次計(jì)算為165.8 s,約為2.8 min,相對(duì)于一般隨機(jī)優(yōu)化動(dòng)輒幾十分鐘的尋優(yōu)時(shí)間來(lái)說已經(jīng)算快速。50次尋優(yōu)共尋得44個(gè)可行解,如圖4所示。由圖4知,在固定第一變軌點(diǎn)的情況下,任務(wù)中止所需的最小速度增量為Δvmin=1938.0 m/s;任務(wù)中止最小總時(shí)間為tmin=14.4 h。
由于再入角的約束為一個(gè)取值范圍,故同一任務(wù)中止時(shí)間對(duì)應(yīng)多個(gè)任務(wù)中止策略。圖4中的虛線為同一任務(wù)中止時(shí)間下最小速度增量的包絡(luò)線。由該包絡(luò)線的變化趨勢(shì)可知,對(duì)于固定變軌點(diǎn)1的雙脈沖變軌任務(wù)中止策略,同樣存在飛行時(shí)間越長(zhǎng)所需速度增量越小的特性。
圖4 故障時(shí)刻為入軌9 h的可行解分布情況Fig.4 Distribution of feasible solution when failure time is 9 hours after translunar injection
圖5 故障時(shí)刻為入軌9 h的中止策略飛行軌跡Fig.5 Flightpath of four abort strategies when failure tim e is 9 hours after translunar injection
圖5為四種雙脈沖變軌任務(wù)中止策略的飛行軌跡。對(duì)比圖5(a)和圖5(b)可知,若要求任務(wù)中止時(shí)間短,則速度脈沖應(yīng)大范圍改變登月飛行器的速度方向。對(duì)比圖5(b)、圖5(c)和圖5(d)可知,任務(wù)中止時(shí)間相近時(shí),若要求速度增量小,則第1次速度脈沖應(yīng)使登月飛行器變軌到大偏心率橢圓軌道,第2次速度脈沖主要進(jìn)行再入角微調(diào)。
3)算例2
為研究雙脈沖任務(wù)中止與變軌點(diǎn)1(發(fā)生故障點(diǎn))的關(guān)系,設(shè)變軌點(diǎn)1時(shí)刻t1∈[t0+1 h,t0+ 9 h],總飛行時(shí)間不超過1天,利用人工免疫算法對(duì)每個(gè)變軌點(diǎn)1的任務(wù)中止策略進(jìn)行隨機(jī)優(yōu)化計(jì)算。為便于計(jì)算,每隔1 h取一個(gè)點(diǎn),仿真結(jié)果如圖6所示。由圖6可得,每一故障時(shí)刻對(duì)應(yīng)多個(gè)任務(wù)中止策略;故障時(shí)刻離地月加速時(shí)刻間隔越短,中止任務(wù)所需的最低速度增量也越小。也即故障發(fā)生時(shí)刻離地月轉(zhuǎn)移加速時(shí)刻越近,越適合采用雙脈沖變軌中止策略。
圖6 中止速度增量隨故障時(shí)刻變化的曲線Fig.6 The curve of abort velocity increment versus failure time
6 結(jié)論
1)地月轉(zhuǎn)移巡航段采用雙脈沖任務(wù)中止,所需速度增量較大,所需飛行時(shí)間可控制在一天之內(nèi),適用于緊急返回情況;
2)當(dāng)約束最大總飛行時(shí)間且故障時(shí)刻固定時(shí),為減小雙脈沖任務(wù)中止策略的總速度增量,一方面可延長(zhǎng)任務(wù)中止時(shí)間,另一方面要求第1次速度脈沖應(yīng)將登月飛行器變軌至大偏心率橢圓返回軌道;
3)當(dāng)約束最大總飛行時(shí)間且故障時(shí)刻不固定時(shí),故障時(shí)刻越靠近地月轉(zhuǎn)移加速時(shí)刻,中止任務(wù)所需的速度增量越小。
[1] Greensite A L.Analysisand design of space vehicle flight control systems-abort,GDC-DDE 68-00l[R].San Diego:George C.Marshall Space Flight Center,1968.
[2] Babb G R.Translunar abort techniques for nonfree-return mission[R].NASA-TM-X1806,NASA:1969.
[3] Hyle C T,Poggatt C E,Weber BD,etal.Abort Planning for Apollo Missions[C]//AIAA 8th Aerospace Sciences Meeting,AIAA-70-0094,1970.
[4] Anselmo D R,Baker M K.Translunar and lunar orbit abort trajectories for Apollo 14[R].NASA-CR-116280,NASA:1972.
[5] Beksinski E D.Abort trajectories for manned lunar mission[D].Maryland:University of Maryland,2007.
[6] Baker M K.Apollo15 translunar and lunar orbitaborts for the nominal launch-26 July 1971[R].NASA-CR-117347,NASA:1971.
[7] Renhardt H P,Seebach JR.Fixed-attitude abort procedures for aborts occurring during translunar injection[R].NASATM-X-69802,NASA:1968.
[8] Merrick R B.On-board calculations of a two-impulse abort to a preselected landing site[R].NASA-TN-D-4599,NASA:1968.
[9] 黃文德,郗曉寧,王威,等.基于雙二體假設(shè)的載人登月自由返回軌道特性分析及設(shè)計(jì)[J].宇航學(xué)報(bào),2010,31:1297-1303.
[10] 黃文德,郗曉寧,王威.基于雙二體假設(shè)的載人登月任務(wù)中止軌道特性分析[J].宇航學(xué)報(bào),2010,31:2067-2074.
[11] 陳海萍.載人登月任務(wù)中止軌道研究綜述[C]//湖南省第二屆研究生創(chuàng)新論壇,航空宇航與控制科學(xué)分論壇,2009,11.
[12] 郗曉寧,黃文德,王威.載人登月任務(wù)中止軌道問題綜述[J].中國(guó)科學(xué):技術(shù)科學(xué),2011,41(5):537-544.
[13] Mission evaluation team.Apollo 11 mission report[R]. NASA-SP-238,NASA:1971.
[14] Stanley D,Cook S,Connolly J,et al.NASA's exploration systems architecture study[R].NASA-TM-2005-214062,NASA:2005.
[15] 孫寧.人工免疫優(yōu)化算法及其應(yīng)用研究[D].哈爾濱:哈爾濱工業(yè)大學(xué),2006.
[16] 陳海萍.載人登月任務(wù)中止軌道特性分析[D].長(zhǎng)沙:國(guó)防科學(xué)技術(shù)大學(xué),2009.
Two-Im pulse Abort Strategy for Translunar Coast of M anned Lunar M issions Based on Artificial Immune Algorithm
PENG Kun,GUO Linli,XIANG Kaiheng,WANG Ping,Yang Lei
(Institute of Manned Space System Engineering;China Academy of Space Technology,Beijing 100094,China)
Abort strategy design formanned lunar missions is an important basis to ensure the safe return of the crew to Earth.First,abort strategy in different phases ofmanned lunarmissions were analyzed based on the flight plan of Constellation program.Then two-impulse abort strategy for translunar coastwas designed,and a calculation process of two-impulse transfer was proposed,in which velocity increment value,velocity azimuth and interval of two impulse were considered as control variable,orbit in the same direction,perigee height,eccentricity and flight time were joined as constraints.Finally,an artificial immune algorithm was used to solve and optimize this problem.Simulation results showed that,two-impulse abort strategy hasmultiple solutions,and their global distribution character is that shorter flight time corresponds to greater velocity increment,larger eccentricity abort orbit has smaller velocity increment when flight time is similar.When the failure time is closer to translunar injection,the velocity increment required is smaller.The effectiveness of artificial immune algorithm for solving two-impulse abort strategy was also validated.
manned lunarmissions;abort strategy;two-impulse;artificial immune algorithm
412.4+1;V529.1
A
1674-5825(2014)02-0146-07
2013-08-02;
2014-03-017
總裝預(yù)研基金(9140A20100111HT0505)
彭坤(1984-),男,博士,工程師,研究方向?yàn)楹教炱鬈壍涝O(shè)計(jì)與優(yōu)化。E-mail:bhkpeng@126.com
猜你喜歡
教學(xué)考試(高考化學(xué))(2021年2期)2021-05-30 06:15:52
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:42
中學(xué)生數(shù)理化·高一版(2020年3期)2020-04-21 08:03:20
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學(xué)生作文(低年級(jí)適用)(2019年9期)2019-10-08 08:37:10
小學(xué)生作文(低年級(jí)適用)(2018年9期)2018-10-08 02:29:48
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2018年6期)2018-06-26 08:36:10
數(shù)學(xué)大世界(2018年1期)2018-04-12 05:39:14
幸福(2017年18期)2018-01-03 06:34:53
中國(guó)衛(wèi)生(2016年8期)2016-11-12 13:26:50
