基于AMESim的增程式電動公交車動力系統(tǒng)設(shè)計與仿真研究
2014-07-18 11:20:51袁磊孫立清蘇勰
汽車技術(shù) 2014年8期
袁磊 孫立清 蘇勰
(北京理工大學(xué))
基于AMESim的增程式電動公交車動力系統(tǒng)設(shè)計與仿真研究
袁磊 孫立清 蘇勰
(北京理工大學(xué))
針對純電動汽車動力電池能量密度低、續(xù)駛里程短的問題,基于BFC6110EV-2電動公交車,設(shè)計了增程式電動公交車的動力系統(tǒng)參數(shù),并根據(jù)汽車設(shè)計方法對所匹配參數(shù)進(jìn)行了理論校核。在AMESim軟件中利用穩(wěn)態(tài)試驗數(shù)據(jù)建立了增程式電動公交車整車仿真模型,采用單點恒溫器控制策略,利用聯(lián)合仿真方法對所設(shè)計的動力系統(tǒng)進(jìn)行了仿真驗證。結(jié)果表明,該增程式電動公交車動力系統(tǒng)的設(shè)計與參數(shù)匹配較合理,與傳統(tǒng)純電動公交車相比,其動力性及續(xù)駛里程都具有一定的優(yōu)越性。
1 前言
電動汽車技術(shù)雖然能夠極大地減少燃油消耗和尾氣排放,但因其動力電池能量密度低、車輛續(xù)駛里程短,所以制約了其發(fā)展[1]。而增程式電動汽車(Range-Extended Electric Vehicle,REEV)是當(dāng)車載可充電儲能系統(tǒng)能夠提供電能時,以純電動汽車模式運行,同時帶有一個僅當(dāng)增程器能量不足時啟動工作的附加能量裝置的車輛[2],增程器的加入很好地解決了純電動汽車存在的問題。增程式電動汽車具有低速扭矩大、高速運行平穩(wěn)、制動能量回收效率高、結(jié)構(gòu)簡單易維修等優(yōu)勢。
以某公司生產(chǎn)的BFC6110EV-2電動車為原型車,采用單點恒溫器控制策略,設(shè)計增程式電動公交車動力系統(tǒng)參數(shù),并采用AMESIM與Matlab/ Simulink進(jìn)行聯(lián)合仿真,以驗證參數(shù)匹配的正確性及在該控制策略下車輛的動力性與續(xù)駛里程。
2 動力系統(tǒng)總體設(shè)計
選取發(fā)動機(jī)和電機(jī)組成增程式電動公交車的輔助動力系統(tǒng)(APU),整車動力系統(tǒng)結(jié)構(gòu)如圖1所示。
該增程式電動公交車為串聯(lián)式結(jié)構(gòu)[3],以純電動汽車為基礎(chǔ),由電力驅(qū)動系統(tǒng)、整車控制系統(tǒng)和輔助動力系統(tǒng)組成。其中發(fā)動機(jī)能量可同時流向電池和電機(jī),此時電池起能量緩沖器的作用。
增程式電動汽車是一個多電源電力總成系統(tǒng),復(fù)雜的結(jié)構(gòu)決定了其傳動系統(tǒng)參數(shù)匹配不同于純電動汽車和內(nèi)燃機(jī)汽車。在進(jìn)行增程式電動汽車的整車參數(shù)匹配時,首先要以運行工況為基礎(chǔ),根據(jù)動力性能指標(biāo)和部件自身的技術(shù)發(fā)展水平初步確定電驅(qū)動系統(tǒng)的部件性能要求,再根據(jù)部件的性能對汽車的動力性能進(jìn)行校核,從理論上初步評估該方案是否符合設(shè)計要求和目標(biāo),然后對電驅(qū)動系統(tǒng)的相關(guān)部件參數(shù)進(jìn)行修正,重復(fù)以上過程,直至達(dá)到設(shè)計目標(biāo)。在上述工作的基礎(chǔ)上再開展動力源匹配優(yōu)化設(shè)計和仿真,從而完成整車系統(tǒng)參數(shù)匹配過程。
3 動力系統(tǒng)部件參數(shù)設(shè)計
BFC6110EV-2電動車的整車參數(shù)及性能指標(biāo)要求如表1所列。
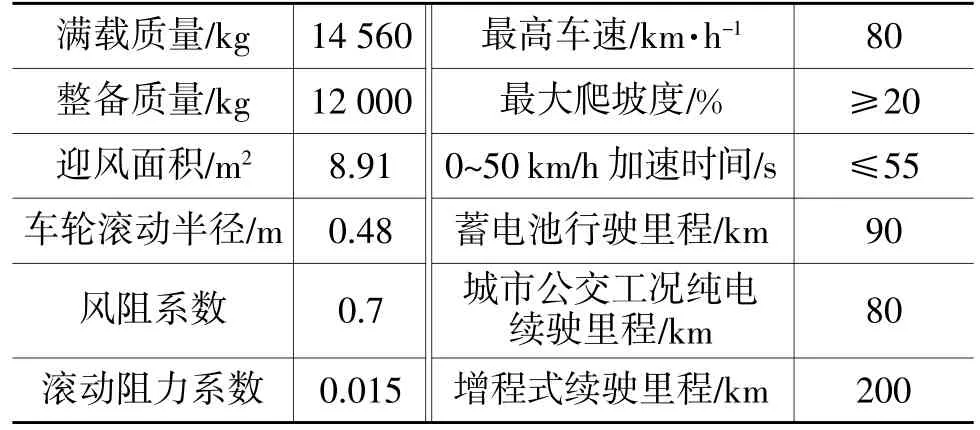
表1 整車參數(shù)及性能指標(biāo)要求
增程式電動公交車動力系統(tǒng)的功率容量取決于驅(qū)動電機(jī)的功率容量,其參數(shù)的確定以滿足車輛正常行駛和動力性要求為準(zhǔn)則:以最高車速vmax勻速行駛;在要求的最大坡道αmax上以不低于最低要求車速vmin行駛;滿足車輛起步加速性能要求,在一定時間ta內(nèi)由0加速到要求車速vr。
3.1 驅(qū)動電機(jī)參數(shù)匹配
驅(qū)動電機(jī)是增程式電動公交車唯一動力驅(qū)動裝置,電機(jī)的選擇既要滿足額定功率,又要滿足最大過載轉(zhuǎn)矩和瞬時功率的要求,其額定功率可以根據(jù)車輛的動力性要求來初步確定[4],即可由汽車動力性的評價指標(biāo)來確定驅(qū)動電機(jī)額定功率。
3.1.1 最高車速要求下的驅(qū)動電機(jī)額定功率
電動汽車以最高車速vmax行駛時,所需驅(qū)動電機(jī)額定功率P1為:
式中,f為滾動阻力系數(shù);m為整車質(zhì)量;ηT為驅(qū)動電機(jī)到驅(qū)動輪的傳動效率;A為迎風(fēng)面積;CD為風(fēng)阻系數(shù)。
由表1可知,vmax=80 km/h,由式(1)可得額定功率P1=99.447 9 kW。
3.1.2 最大爬坡度要求下的驅(qū)動電機(jī)額定功率
某給定車速vb下電動汽車以最大爬坡能力行駛時所需驅(qū)動電機(jī)額定功率P2為:
式中,δ為旋轉(zhuǎn)質(zhì)量換算系數(shù),通過對照汽車旋轉(zhuǎn)質(zhì)量系數(shù)表擬定該電動公交車的δ=1.1[5]。
將表1中相關(guān)參數(shù)與δ值代入式(3),得到如圖2所示的加速時間-需求功率曲線,增程式電動公交車滿足0~50 km/h的加速時間不大于55 s,由圖2所示曲線可得此增程式電動公交車的驅(qū)動電機(jī)峰值功率應(yīng)為P3=131.734 2 kW。
式中,α為設(shè)定的最大爬坡度。
在公交車工況下,電動汽車以12 km/h的車速爬20%的坡度時,最大爬坡度下要求的驅(qū)動電機(jī)額定功率P2=141.214 7 kW。
3.1.3 最大加速度要求下的驅(qū)動電機(jī)額定功率
在加速時間ta內(nèi),電動汽車由vb加速到vf所需的驅(qū)動電機(jī)額定功率P3為:
需求的驅(qū)動電機(jī)最大功率為:
又因
式中,Pe為額定功率;λ為電機(jī)過載系數(shù)。
取λ=1.5,計算得Pe=94 kW,即需求的驅(qū)動電機(jī)額定功率Pe≥94 kW。
根據(jù)匹配要求選用JD132(A)交流異步電機(jī)作為增程式電動公交車的驅(qū)動電機(jī),電機(jī)技術(shù)參數(shù)見表2,電機(jī)特性曲線如圖3所示。相應(yīng)選擇TGN14型電機(jī)控制器,其額定功率為100 kW,額定電壓為386 V,峰值功率為150 kW,峰值電壓為460 V。
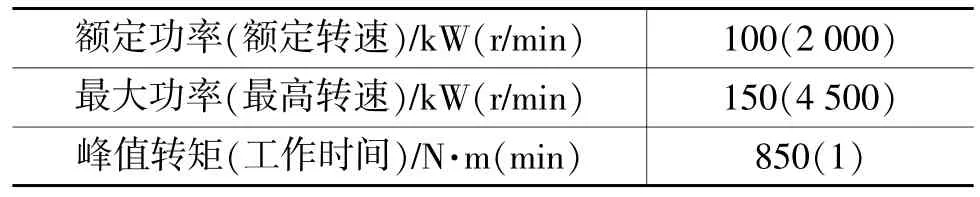
表2 電機(jī)技術(shù)參數(shù)
3.2 動力蓄電池參數(shù)匹配
3.2.1 功率與質(zhì)量要求
為保證車輛的動力性,動力蓄電池的最大放電功率Pbat_max須滿足:
式中,Pmax=150kW為電機(jī)峰值功率;PA為車輛附件(包括電動空調(diào)、電動助力轉(zhuǎn)向系統(tǒng)、發(fā)動機(jī)冷卻風(fēng)扇等)總功率;ηmc為驅(qū)動電機(jī)及其控制器效率,取值0.85。
經(jīng)對BFC6110EV-2電動車實車檢測可知,車輛空調(diào)系統(tǒng)功率約為10kW,其它附件功率約為5 kW,則PA約為15 kW,將各數(shù)值代入式(6)得Pbat_max≥191.47 kW。
本文所選的動力電池為鋰離子電池,當(dāng)其比能量We為130 Wh/kg、比功率Wp為350 W/kg時,滿足功率要求的電池組質(zhì)量參數(shù)547.06 kg,滿足能量容量要求的電池組質(zhì)量參數(shù)
3.2.2 能量要求
動力蓄電池還要保證電動汽車以va勻速行駛時的蓄電池純電動續(xù)駛里程為d1,其能量EB須滿足:
式中,DOD為蓄電池放電深度,取為0.7;η為系統(tǒng)效率(包括傳動效率、電機(jī)及控制器效率等),取值0.7。
JD132(A)交流異步電機(jī)的額定電壓為243 V,電機(jī)控制器的額定輸入電壓(DC)為386 V,電池組的電壓等級應(yīng)與電機(jī)控制器的額定輸入電壓一致。則根據(jù)式(7)可計算電池組容量CE為:
增程式汽車要求電池具有較大的比能量和比功率。鋰離子電池的比能量為100~150Wh/kg,比功率為200~450W/kg,循環(huán)壽命為800~1200@80%DOD,較適合用作電動汽車和增程式電動汽車的動力電池。
基于以上計算和分析,采用錳酸鋰電池作為該車動力電池,其單體額定電壓為3.7 V,單體額定容量為100 Ah,單體質(zhì)量為3.3 kg;4節(jié)單體電池并聯(lián)為一組,108組串聯(lián),總質(zhì)量為1 425.6 kg,總電壓為388.8 V,總?cè)萘繛?00 Ah。
3.3 增程器參數(shù)匹配
發(fā)動機(jī)和電機(jī)組成的輔助動力系統(tǒng)在蓄電池出現(xiàn)故障時應(yīng)能保證車輛以va勻速行駛,即給驅(qū)動電機(jī)提供冗余功率。
增程器標(biāo)定輸出功率PRE計算式為:
據(jù)統(tǒng)計,在北京城市工況下,非環(huán)路公交車輛的最高車速為50km/h[6]。為保證增程器有足夠的功率容量,并可快速地給電池組充電,以滿足進(jìn)入鬧市區(qū)或限排區(qū)零排放純電動行駛的要求,選擇此最高車速代入式(9)來確定增程器輸出功率。通過計算可得該車以va=50 km/h行駛時增程器的功率PRE≥44.1 kW。
選擇永磁同步發(fā)電機(jī)作為輔助動力系統(tǒng)發(fā)電機(jī),其額定功率為63kW,最大電流為270A,最低電壓為130 V,額定效率為88%,質(zhì)量為45 kg。發(fā)電機(jī)效率特性如圖4所示。
增程式電動公交車由驅(qū)動電機(jī)而不是發(fā)動機(jī)來提供加速或爬坡的峰值功率,因此可以在減小發(fā)動機(jī)額定功率和尺寸的同時,使車輛的發(fā)動機(jī)穩(wěn)定地運行在高效區(qū)。綜上所述,增程式電動公交車仍需沿用技術(shù)成熟的先進(jìn)四沖程發(fā)動機(jī)。
本文選用2.2 L四沖程柴油發(fā)動機(jī),其峰值功率為92 kW,最大轉(zhuǎn)矩為305 N·m,最低燃油消耗率為203 g/kW·h,對應(yīng)的發(fā)動機(jī)功率為50.5 kW,其萬有特性如圖5所示。
當(dāng)發(fā)動機(jī)額定轉(zhuǎn)速在2 000 r/min附近、負(fù)荷率約為80%時具有較低的燃油消耗率[7]。根據(jù)圖5可得到發(fā)動機(jī)高效工作點,由查表計算可得最低燃油消耗率點處油耗f為12.17 L/h,則滿足增程式電動公交車增程式續(xù)駛里程d所需的油箱容積V為:
由式(10)可得增程式續(xù)駛里程200 km所需油箱容積V=48.68 L,故選擇油箱容積為50 L。
4 參數(shù)校核及匹配結(jié)果
4.1 整車質(zhì)量驗算
增程式電動汽車整車質(zhì)量計算式為:
式中,mch為整車底盤與車身質(zhì)量;mB為電池質(zhì)量;mRE為增程器質(zhì)量;mmot為驅(qū)動電機(jī)質(zhì)量。
增程式電動公交車采用BFC6110EV-2電動車的底盤、車身等整車參數(shù),經(jīng)過匹配后的電機(jī)與原電機(jī)相同,變速器選用2擋變速器,mB=3.3×108×4= 1 425.6 kg;增程器中發(fā)電機(jī)質(zhì)量為45 kg,發(fā)動機(jī)質(zhì)量為307 kg,發(fā)動機(jī)/發(fā)電機(jī)組的連接件和支撐件質(zhì)量約為10 kg,則mRE=45+307+10=362 kg;原車電池質(zhì)量mB1=5.5×3×108=1 782 kg。
匹配的增程式電動公交車與原車質(zhì)量差為Δm=1 425.6+362-1 782=5.6 kg,即增程式電動公交車質(zhì)量與BFC6110EV-2電動車質(zhì)量基本相等。
4.2 動力性能校核
4.2.1 最高車速
最高車速應(yīng)滿足:
式中,nmax為電機(jī)最高轉(zhuǎn)速;r為輪胎半徑;ig2·i0為最小傳動比。
經(jīng)計算得最高車速vmax≤95 km/h時滿足要求。
4.2.2 最大爬坡度
當(dāng)車輛具有最大爬坡能力時,電機(jī)處于短時過載狀態(tài),其轉(zhuǎn)矩與功率均為峰值。由表2可知最大爬坡時電機(jī)短時過載工作轉(zhuǎn)矩Tαmax=850 N·m,電機(jī)短時過載功率Pαmax=150 kW。車輛爬坡行駛時應(yīng)滿足以下方程:
式中,F(xiàn)α為車輛勻速爬坡時所需驅(qū)動力。
由式(13)計算可得該增程式電動公交車的最大爬坡度imax=tanαmax=20.64%,此時爬坡車速為10.89km/h。圖6為該車的驅(qū)動力—行駛阻力平衡圖,圖中行駛阻力曲線僅考慮滾動阻力Ff和空氣阻力Fw。
從圖6可看出,該車的最高車速為93.9 km/h,則對應(yīng)電機(jī)工作轉(zhuǎn)速為4 373.4 r/min。
4.2.3 起步加速性能
車輛的加速性能以車輛從低速v1加速到較高車速時所需的時間來評價,車輛從靜止起步加速到50 km/h時的加速時間計算方法如下。
在車輛起步階段驅(qū)動電機(jī)轉(zhuǎn)速為電機(jī)基速,此時對應(yīng)的車速應(yīng)滿足:
式中,nm1為電機(jī)基速。0~vr加速時間為:
式中,Tmmax為電機(jī)瞬時最大轉(zhuǎn)矩;Tv為電機(jī)最大功率時的輸出轉(zhuǎn)矩,Tv=9549Pmmax/n,n=v·ig·i0/(0.377r)。
由式(15)計算得到0~50 km/h加速時間t= 2.087+23.817=25.904 s<55 s,2.087 s和23.817 s分別是恒轉(zhuǎn)矩區(qū)和恒功率區(qū)的加速時間,因此,電機(jī)的機(jī)械特性滿足加速性能要求。
4.3 動力系統(tǒng)參數(shù)匹配結(jié)果
通過以上計算分析與校核,得到的動力系統(tǒng)參數(shù)匹配結(jié)果如表3所列。

表3 動力系統(tǒng)參數(shù)匹配結(jié)果
5 控制策略仿真驗證與結(jié)果分析
利用仿真平臺AMESIM建立增程式電動公交車的動力總成,利用仿真集成環(huán)境Simulink建立整車控制器模型,并將Simulink控制模塊導(dǎo)入AMESIM中,在此基礎(chǔ)上進(jìn)行整車聯(lián)合仿真。仿真模型如圖7所示。
5.1 控制策略
5.1.1 能量管理策略
仿真所用控制策略為單點恒溫器控制策略,只針對我國典型城市公交工況進(jìn)行增程式電動公交車能量管理策略研究,控制策略基本參數(shù)如表4所列[8,9]。
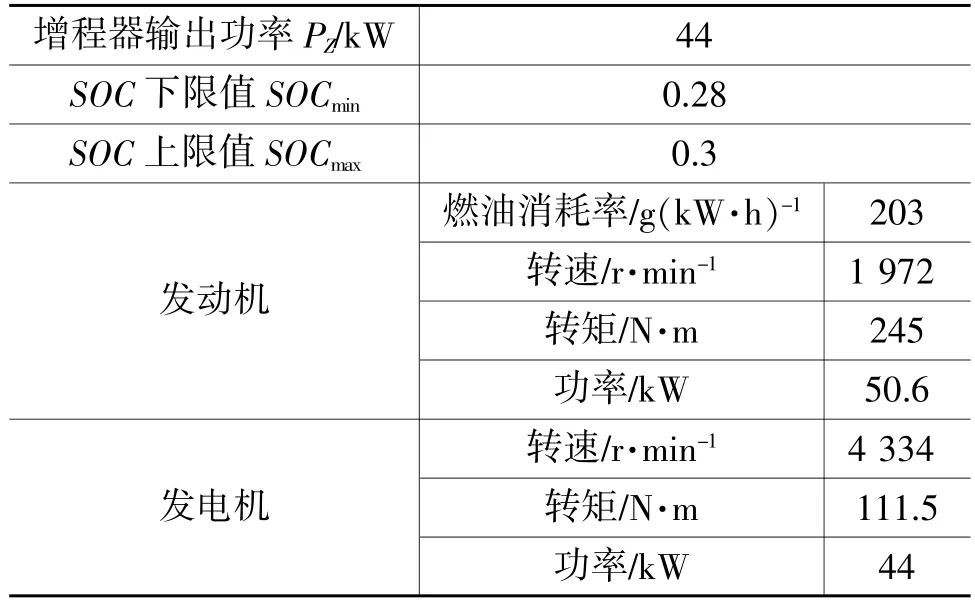
表4 控制策略基本參數(shù)
5.1.2 制動能量回收策略
電機(jī)最低回收轉(zhuǎn)速為500 r/min。電機(jī)制動能量回收系數(shù)為:當(dāng)SOC<40%時,回收系數(shù)為1;當(dāng)40%<SOC<80%時回收系數(shù)為0.6;當(dāng)SOC>80%時回收系數(shù)為0。
5.2模型驗證
用BFC6110EV-2電動公交車的技術(shù)參數(shù)和試驗數(shù)據(jù)對仿真模型進(jìn)行驗證,其中續(xù)駛里程和能量消耗是在半載質(zhì)量和電池組放電深度為70%的條件下得出的。試驗結(jié)果與仿真結(jié)果如表5所列。

表5 試驗結(jié)果與仿真結(jié)果
由表5可知,模型仿真結(jié)果和電動公交車實際試驗結(jié)果誤差較小,說明所建立的模型是可靠的,可通過該模型來進(jìn)行性能驗證。
5.2.1 動力性能驗證
通常動力性能評價考察的是車輛能夠達(dá)到的最高車速和加速性能(由低速v1加速到較高車速時所需的時間),在仿真過程中主要通過驗證整車在循環(huán)工況下車速跟隨工況的接近程度來確定。仿真時采用NEDC工況與我國典型城市公交工況進(jìn)行動力性驗證,同時也可驗證動力系統(tǒng)控制的有效性。在我國典型城市公交工況下速度跟隨情況、實際車速與工況車速的偏差如圖8所示。
從圖8可看出,在我國典型城市公交工況下,模型的實際車速與工況車速偏差較小,說明驅(qū)動電機(jī)的參數(shù)選擇與驅(qū)動電機(jī)的轉(zhuǎn)矩控制都可滿足市區(qū)工況下的要求。
但是在我國典型城市公交工況下,最高車速沒有達(dá)到60 km/h,因此選擇模型在NEDC工況下運行,NEDC工況下整車速度跟隨情況、實際車速與工況車速的偏差如圖9所示。
從圖9可看出,實際最高車速只能達(dá)到93.54km/h,與動力性計算基本符合。由于公交車質(zhì)量較大,最高速度較低,高速段加速困難,在工況的最后階段速度跟隨情況較差。
由上述可知,整車的動力性能與參數(shù)匹配計算結(jié)果一致,另外,建立的動力系統(tǒng)控制模塊也滿足車輛控制要求。
5.2.2 控制策略與燃油經(jīng)濟(jì)性驗證
在單點恒溫器控制策略下,增程器在電量維持階段開啟,設(shè)置初始SOC為0.31,工況為我國典型城市公交工況,增程器工作區(qū)間為28%~30%,增程器輸出功率和電池組當(dāng)前SOC值如圖10所示。
從圖10可看出,按照控制規(guī)則增程器在電池組SOC下降到28%時開啟,并輸出44 kW的功率;當(dāng)SOC重新為30%時增程器關(guān)閉。由于制動能量回收的原因,增程器開啟前電池SOC有上升趨勢。
增程式電動公交車在電量消耗階段以純電動模式運行,為了最大限度地保證電池組穩(wěn)定可靠地工作,減少電池組不一致性對整個電池組系統(tǒng)工作的影響,提高電池組的壽命,在實際應(yīng)用中,電池組SOC應(yīng)采用經(jīng)濟(jì)續(xù)駛里程的工作范圍,SOC取0.95~0.25。在仿真中,以0.70為動力電池SOC初始值,連續(xù)仿真1 200 s后的結(jié)果如圖11所示。
由圖11可看出,SOC變化量為0.038 057,行駛距離為4.440 2 km,按照放電深度DOD=0.7計算,可得純電動續(xù)駛里程為81.67 km。
在增程器與蓄電池并行供電模式下,當(dāng)蓄電池由初始值SOC0=0.4降低到設(shè)定下限值SOCmin=0.28時,啟動增程器以44 kW的恒功率發(fā)電。根據(jù)當(dāng)時的功率需求,給電機(jī)供電的同時也會向蓄電池充電;當(dāng)蓄電池由SOCmin回升至SOCmax時關(guān)閉增程器,切換到純蓄電池供電模式。為了保證在選定的仿真工況下能觀察到增程器的啟動過程,仿真時選擇初始值SOC0=0.4,比SOCmin稍大。圖12和圖13分別為我國10個典型城市公交工況下續(xù)駛里程和整車能耗的變化情況。
由圖12和圖13可看出,仿真總運行時間為13 040 s,當(dāng)時間為3 128 s時,蓄電池SOC從0.40下降到0.28,總行駛里程為55.06 km,其中純電動續(xù)駛里程為12.62km,純電動電能消耗量為15.674kW·h;增程器開啟了13次,總?cè)加拖牧繛?.46 L,循環(huán)后SOC為0.286 2。通過將蓄電池SOC的變化量換算成等效燃油消耗量,再加上發(fā)動機(jī)在工況內(nèi)總的燃油消耗量,可計算出增程式電動公交車的增程續(xù)駛里程。在我國典型城市公交工況下,增程式電動公交車總的燃油消耗量、電能消耗量、純電動行駛里程和總行駛里程計算結(jié)果如表6所示。

表6 增程式電動公交車油耗、電能消耗和續(xù)駛里程
經(jīng)計算,純電動行駛時電能消耗量為1.12(kW·h)/km;電量維持階段的百公里油耗為22.29 L/100 km,可求得等效百公里燃油消耗為17.71 L/100 km(使用低谷電價時水平)。
通過上述分析可知,增程式電動公交車在城市工況下節(jié)油效果明顯。
6 結(jié)束語
基于BFC6110EV-2電動公交車設(shè)計了一輛增程式電動公交車,給出了增程式電動公交車動力系統(tǒng)參數(shù)設(shè)計與校核方法。基于AMESim-Simulink聯(lián)合仿真平臺搭建了該電動公交車仿真模型,對定點恒溫器控制策略以及動力系統(tǒng)進(jìn)行了仿真驗證。結(jié)果表明,在我國典型城市公交工況和NEDC工況下,增程式電動公交車動力性能良好,節(jié)油效果明顯。
1 Al-Adsani A S,Jarushi A M,Schofield N.An ICE/HPM Genera-tor Range Extender in a Series Hybrid Electric Vehicle.5th IET International Conference on Power Electronics,Machines and Drives,PEMD 2010.
2 Tate E D,Michael Harpster,Peter Savagian.The electrification of the automobile:From conventional Hybrid,to Plug-in Hybrids,to Extended-Range Electric Vehicles. SAE2008-01-0458
3宋珂,章桐.增程式純電驅(qū)動汽車動力系統(tǒng)研究.汽車技術(shù). 2011(7):14~15.
4彭濤,陳全世,田光宇.并聯(lián)混合動力電動汽車動力系統(tǒng)的參數(shù)匹配.機(jī)械工程學(xué)報,2003,39(2):69.
5余志生.汽車?yán)碚?北京:機(jī)械工業(yè)出版社,2008,1.
6 Wang Z P,Sun F C.Statistical analysis for the driving cycle of Beijing's bus.Journal of Beijing Institute of Technology,2004,13(4):436-440
7汽車工程手冊編委會.汽車工程手冊一設(shè)計篇.北京:人民交通出版社,2001.
8韓志杰.串聯(lián)式混合動力電動公交車動力系統(tǒng)設(shè)計和控制策略研究.北京:北京理工大學(xué),2007.
9李曉英,于秀敏,李君,吳志新.串聯(lián)混合動力汽車控制策略.吉林大學(xué)學(xué)報(工學(xué)版),2005,35(2):321~324.
(責(zé)任編輯文楫)
修改稿收到日期為2013年12月17日。
A Study on Design and Simulation of Powertrain for REEB Based on AMESim
Yuan Lei,Sun Liqing,Su Xie
(Beijing Institute of Technology)
To solve the problem of low capacity density of the battery pack and short driving range of battery electric vehicles,the powertrain and control strategy of a range-extended electric bus were designed based on the electric bus BFC6110EV-2.The parameters of the powertrain were verified according to vehicle design method.The bus simulation model was built with steady state database of Software AMESim.Single-point thermostat control strategy was implemented and the co-simulation method was adopted to verify the powertrain,The results show that the powertrain design and parameter matching are reasonable,they also show advantages in dynamic performance and driving range as compared with traditional battery electric bus.
Range-extended electric bus,Powertrain,Parameter design,Co-simulation
增程式電動公交車動力系統(tǒng)參數(shù)設(shè)計聯(lián)合仿真
U469.72
A
1000-3703(2014)08-0056-07