二極管搬運(yùn)機(jī)械手系統(tǒng)設(shè)計(jì)
2014-07-11 07:43:44岳東海
制造業(yè)自動(dòng)化 2014年8期
關(guān)鍵詞:系統(tǒng)
岳東海
(常州信息職業(yè)技術(shù)學(xué)院,常州 213164)
0 引言
工業(yè)機(jī)械手是近幾十年來發(fā)展起來的高科技自動(dòng)化設(shè)備,機(jī)械手是工業(yè)機(jī)器人的重要分支。它的特點(diǎn)是可通過編程來完成各種預(yù)期的作業(yè)任務(wù),在構(gòu)造和性能上兼有人和機(jī)器各自的優(yōu)點(diǎn),尤其體現(xiàn)了人的智能和適應(yīng)性。
所有的電子電路中都會(huì)用到半導(dǎo)體二極管,其在電路中起重要的作用。普通二極管的生產(chǎn)中有“封膠→短烤→離模→長考”這樣一段流程,這道工序中“離模”是將托盤上經(jīng)過“短烤”后的二極管半成品,利用特制工具人工轉(zhuǎn)移到模條上進(jìn)入“長考”工序。
本系統(tǒng)根據(jù)二極管的自身特征和外形,設(shè)計(jì)能夠靈活準(zhǔn)確的抓取二極管的機(jī)械手部件。利用高精度三軸線性模組帶動(dòng)機(jī)械手實(shí)現(xiàn)精準(zhǔn)定位,完成“離模”工序的自動(dòng)化操作。控制系統(tǒng)由觸摸屏、PLC、伺服系統(tǒng)及步進(jìn)控制系統(tǒng)構(gòu)成,機(jī)械系統(tǒng)通過INVENTOR軟件造型后,進(jìn)行運(yùn)動(dòng)仿真,確定其機(jī)械結(jié)構(gòu)。
1 工作原理及過程
二級管“離模”工序如圖1所示。所謂“離模”是將托盤(3)上的二極管(24行×50列=1200個(gè))搬運(yùn)到24個(gè)模條(1)上。目前國內(nèi)大部分二極管生產(chǎn)廠家“離模”這道工序是由人工手持特定工具搬運(yùn)完成。在轉(zhuǎn)移搬運(yùn)過程中要將特制工具上的50只二極管整體對準(zhǔn)托架上的排孔,然后下落才能完成二級管的批量轉(zhuǎn)移。這道工序?qū)と说氖指泻褪炀毘潭纫蠛芨撸仨毥?jīng)過長時(shí)間的工作經(jīng)驗(yàn)累積才能達(dá)到速度要求。
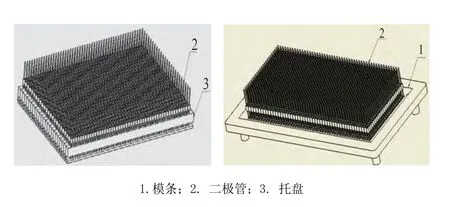
圖1 二極管“離模”工序簡圖
本系統(tǒng)采用如圖2所示的機(jī)械手搬運(yùn)機(jī)構(gòu)完成“離模”工序,機(jī)構(gòu)本體是固定在三自由度線性模組的Z軸上,機(jī)械手搬運(yùn)機(jī)構(gòu)的工作過程如下:
1)機(jī)械手搬運(yùn)機(jī)構(gòu)中7直線絲杠步進(jìn)電機(jī)正轉(zhuǎn)通過6拉板帶動(dòng)5推齒連接和2推齒向上運(yùn)動(dòng),同時(shí)機(jī)械手搬運(yùn)機(jī)構(gòu)隨線性模組高速運(yùn)動(dòng)到設(shè)定位置。
2)線性模組低速帶動(dòng)搬運(yùn)機(jī)構(gòu)進(jìn)入托盤上的二極管陣列,1插齒的齒條進(jìn)入到二極管陣列下方(陽極引腳)行縫隙中,如圖2所示。
3)機(jī)械手搬運(yùn)機(jī)構(gòu)中7直線絲杠步進(jìn)電機(jī)反轉(zhuǎn),2推齒向下運(yùn)動(dòng),推齒齒條進(jìn)入二極管管陣列上方(陰極引腳)列縫隙中,實(shí)現(xiàn)陣列中所有二極管的鎖定。
4)線性模組Z軸帶動(dòng)搬運(yùn)機(jī)械手向上運(yùn)行,帶動(dòng)所有二極管脫離托盤。在通過線性模組X軸和Y軸的配合運(yùn)行,帶動(dòng)機(jī)構(gòu)至模條組上方,1插齒末端對準(zhǔn)第一個(gè)模條排孔,如圖3所示。
5)搬運(yùn)機(jī)械手14步進(jìn)電機(jī)正轉(zhuǎn),通過11絲杠、10導(dǎo)軌及9滑塊等構(gòu)件帶動(dòng)2推齒向1插齒末端運(yùn)動(dòng),在2推齒橫向縫隙的作用下,二極管陣列整體沿1插齒縱向縫隙路徑向其末端運(yùn)動(dòng)。當(dāng)?shù)谝恍卸O管脫離1插齒末端后,自由下落至第一模條排孔內(nèi)。模條排孔為錐形孔,且自由下落開始時(shí)二極管陽極引腳距離模條排孔距離只有5mm,可保證每行自由下落時(shí)二極管可以順利進(jìn)入模條排孔內(nèi)。如圖4所示。
6)線性模組帶動(dòng)搬運(yùn)機(jī)械手移動(dòng)1個(gè)模條寬度的距離(6mm),重復(fù)動(dòng)作(5),完成第2行二極管的搬運(yùn),以此類推。
7)完成所有二極管陣列的搬運(yùn)后,7直線絲杠步進(jìn)電機(jī)正轉(zhuǎn)抬起復(fù)位,14步進(jìn)電機(jī)反轉(zhuǎn)復(fù)位。重復(fù)過程(1),進(jìn)行下次搬運(yùn)。
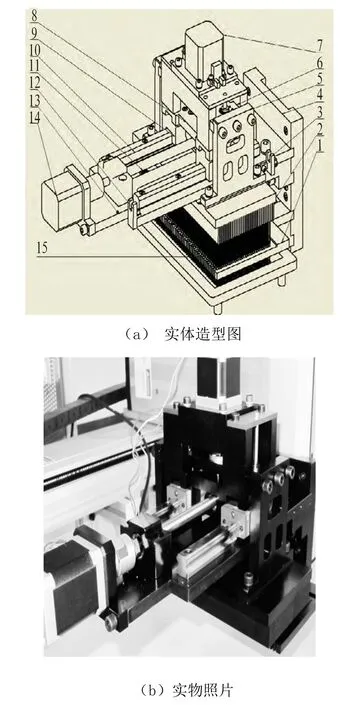
圖2 機(jī)械手結(jié)構(gòu)圖
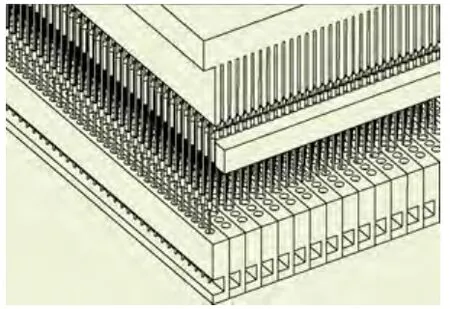
圖3 二極管自由下落前
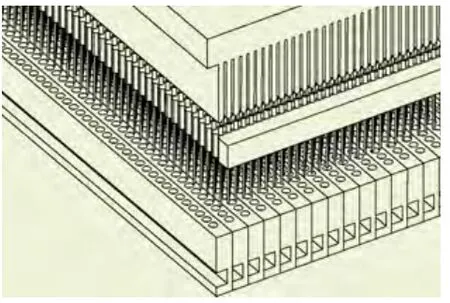
圖4 二極管自由下落后
2 機(jī)械手控制系統(tǒng)設(shè)計(jì)
本系統(tǒng)利用三軸線性模組驅(qū)動(dòng)機(jī)械手本體構(gòu)件運(yùn)行,三軸線性模組采用伺服電機(jī)驅(qū)動(dòng)。機(jī)械手搬運(yùn)機(jī)構(gòu)本體采用兩臺(tái)步進(jìn)電機(jī)驅(qū)動(dòng)如圖2所示,硬件控制系統(tǒng)原理圖,如圖5所示。
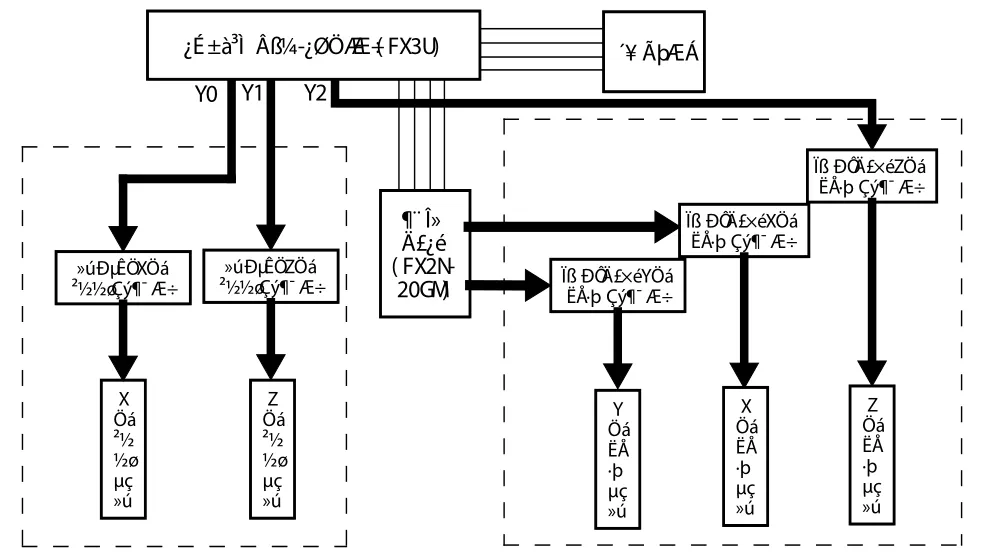
圖5 硬件控制系統(tǒng)原理圖
硬件配置列表如表1所示。
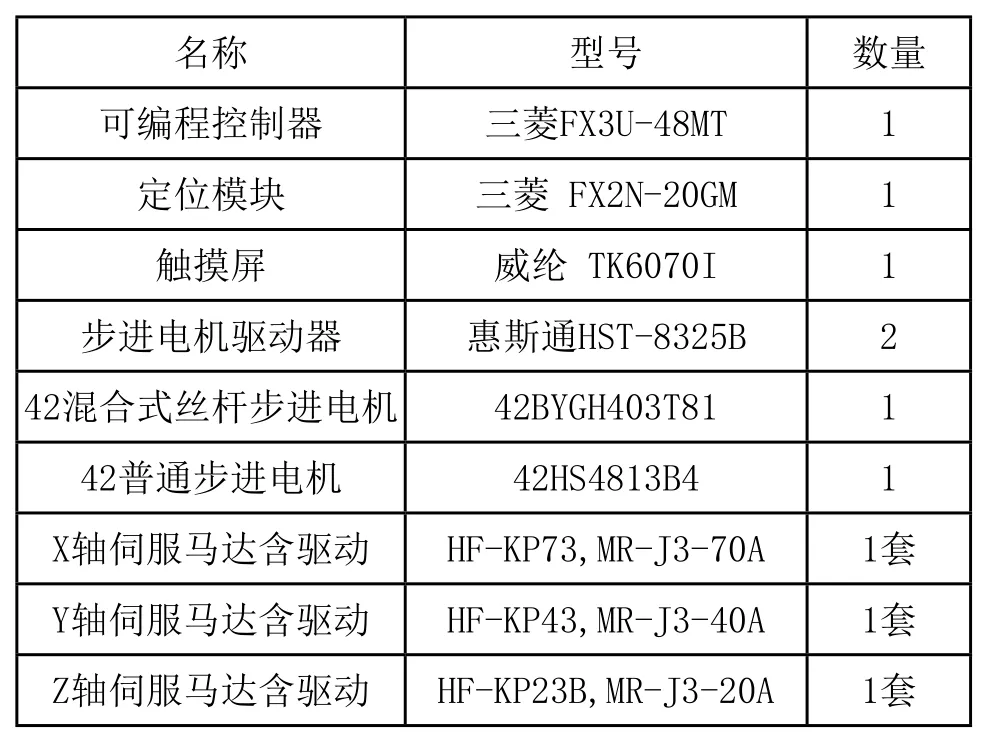
表1 系統(tǒng)硬件配置清單
其中,可編程控制器選用三菱FX3U-48MT,該型號PLC內(nèi)置了3 軸獨(dú)立最高100kHz 的定位功能(Y0、Y1、Y2)。并且增加了新的定位指令:帶DOG 搜索的原點(diǎn)回歸(DSZR ),中斷單速定位(DVIT)和表格設(shè)定定位(TBL),從而使得定位控制功能更加強(qiáng)大,使用更為方便。定位模塊FX2N-20GM可同時(shí)控制2根軸進(jìn)行直線插補(bǔ)圓弧插補(bǔ),有絕對位置檢測功能。
本系統(tǒng)線性模組由3臺(tái)伺服電機(jī)控制,機(jī)械手本體由2臺(tái)步進(jìn)電機(jī)控制。可編程控制器FX3U的高速脈沖端Y0,Y1控制2臺(tái)步進(jìn)電機(jī),Y2控制線性模組Z軸伺服電機(jī)。定位模塊FX2N-20GM控制線性模組X、Y軸伺服電機(jī)。其中觸摸屏為上位機(jī),PLC及定位模塊為下位機(jī),觸摸屏實(shí)現(xiàn)系統(tǒng)參數(shù)的輸入、系統(tǒng)運(yùn)行監(jiān)控及生產(chǎn)情況統(tǒng)計(jì)。系統(tǒng)運(yùn)行指令由上位機(jī)觸摸屏發(fā)出,并同時(shí)監(jiān)控系統(tǒng)的運(yùn)行情況,實(shí)時(shí)顯示搬運(yùn)完成二極管陣列的數(shù)量。每日搬運(yùn)結(jié)束后自動(dòng)生成報(bào)表,并可隨時(shí)打印輸出形成文檔供企業(yè)管理者查閱。若系統(tǒng)工作過程中出現(xiàn)以外情況停止運(yùn)行,觸摸屏?xí)@示相應(yīng)的報(bào)價(jià)信息。
3 結(jié)束語
本系統(tǒng)能夠?qū)崿F(xiàn)二極管生產(chǎn)線上批量搬運(yùn)二極管到下道工序,即完成“離模”工序的自動(dòng)化搬運(yùn)。通過觸摸屏實(shí)現(xiàn)運(yùn)動(dòng)參數(shù)設(shè)定并實(shí)時(shí)監(jiān)控系統(tǒng)的運(yùn)行情況。同時(shí)記錄生產(chǎn)量,并生成生產(chǎn)報(bào)表,使企業(yè)管理者可以隨時(shí)了解企業(yè)的生產(chǎn)狀況。實(shí)踐證明,系統(tǒng)運(yùn)行穩(wěn)定,重復(fù)定位精度高,抓取搬運(yùn)過程速度快,已成功應(yīng)用于二極管生產(chǎn)企業(yè)。此外,本系統(tǒng)的應(yīng)用可擴(kuò)展到與二極管外形結(jié)構(gòu)相似的其他電子元件生產(chǎn)工序中,使得本系統(tǒng)的應(yīng)用范圍更加廣泛,市場前進(jìn)廣闊。
[1] 巫莉.電氣控制與PLC應(yīng)用[M].北京:中國電力出版社2008.
[2] 王月芹.基于PLC機(jī)械手控制系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)[J].機(jī)電產(chǎn)品開發(fā)與創(chuàng)新,2011.05.
[3] 薛永風(fēng),等.基于FX2N-20GM的雙軸步進(jìn)控制系統(tǒng)設(shè)計(jì)[J].組合機(jī)床與自動(dòng)化加工技術(shù),2011,09.
[4] 三菱FX2N-10GM-20GM編程手冊[Z].
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
