增程式電動環衛車能量管理策略仿真研究*
2014-07-08 02:16:38解少博劉璽斌王佳魏朗
汽車技術 2014年7期
關鍵詞:發動機
解少博劉璽斌王佳魏朗
(1.陜西汽車集團有限責任公司;2長安大學)
增程式電動環衛車能量管理策略仿真研究*
解少博1,2劉璽斌1王佳1魏朗2
(1.陜西汽車集團有限責任公司;2長安大學)
基于Matlab/Simulink搭建了增程式電動環衛車正向仿真模型,在我國典型城市公交工況下,對增程器的開關模式、持續運行模式、恒定功率輸出模式和功率隨動輸出模式等4種能量管理策略進行100 km的連續仿真,結果表明,增程器開關模式和持續運行模式均可使電池組SOC維持在合理的區間,但恒定功率輸出模式比功率隨動輸出模式的等效百公里油耗小,最小為29.13 L;設置較小的增程器輸出功率能夠使電池SOC變化平穩,避免電池組的頻繁充、放電現象。
1 前言
由于純電動汽車的電池能量密度小,無法滿足較長續駛里程的要求,因而限制了市場對其接受程度,為此,能有效延長續駛里程的增程式電動汽車得到了越來越多的研究[1~5]。增程式電動汽車由于配置了可外接充電的動力電池,能夠像純電動汽車一樣在市區內以純電動模式行駛,而在需要較大續駛里程時,可使電池組荷電狀態降至一定限度進入增程模式,利用發動機-發電機組成的增程器為車輛提供能量,同時還可為電池組輔助充電,達到延長續駛里程的目的。
增程式電動汽車通常包含電池組的電量消耗和電量維持2個階段[6],因此,增程式電動汽車存在多種能量管理方式。本文針對一款正在研發的增程式電動環衛車,分別對其4種能量管理策略進行了仿真,并分析其各自特點,為整車控制策略的制定提供參考。
2 增程式電動環衛車系統建模
該增程式電動環衛車為后輪驅動,其總長×總寬×總高為7830mm×2470mm×2760mm,整備質量為10 800 kg,總質量為16 000 kg,主減速器減速比為6.733,輪胎半徑為507 mm,其拓撲結構如圖1所示。工作時,驅動電機通過主減速器將動力傳遞給驅動輪;發動機與ISG電機組成的增程器與動力電池串接在直流母線上,給驅動電機提供功率,同時為動力電池充電。
2.1 驅動電機模型
驅動電機為永磁磁阻電機,額定轉速為800r/min,最高轉速為3 000 r/min,在電動和發電狀態下的扭矩和功率外特性見圖2,其額定功率最大可達100 kW,峰值功率最大可達200 kW,對應的扭矩分別為1 250 N·m和2 500 N·m。驅動電機的效率特性如圖3所示,效率大于85%的工作區域占整個工作區域的80%以上。
2.2 增程器模型
增程器由發動機和發電機構成,其控制方式選擇為功率控制方式,即根據整車控制策略計算增程器的發電功率需求,通過CAN總線發送給增程器控制器,增程器控制器根據接收到的目標功率進行目標轉速和扭矩的解析并分別控制發動機和發電機。發動機選擇排量為2.776 L的柴油機,其額定功率為96 kW,最大扭矩為360 N·m,最低燃油消耗率為210 g/kW·h,其油耗特性如圖4所示。
對于發動機的動態響應特性,將其對目標轉速的響應視為一階環節[7],即
式中,ne為發動機的實際響應轉速;nt為增程器控制器發送給發動機ECU的目標轉速;s為拉氏算子;τ和a為系統常數,仿真中分別取為0.1和1。
發電機為永磁磁阻電機,額定轉速和峰值轉速分別為2000r/min和3000r/min,額定功率和峰值功率分別為60kW和90kW,其發電效率特性如圖5所示。
2.3 電池組模型
動力電池組由168組電壓為3.2 V的磷酸鐵鋰電池單體串聯而成,其標稱容量為180 Ah,最大充放電倍率分別為1C和3C。仿真中將電池單體視為一個開路電壓和等效內阻構成的等效電路,即Rint模型。
3 仿真和分析
3.1 能量管理策略
增程式電動汽車行駛過程中分為純電動模式和增程模式。當動力電池組的SOC高于0.35時,車輛工作在純電動模式;當電池組的SOC低于0.25時增程器開啟進入增程模式。在該環衛車處于增程模式時,增程器的工作狀態可分為開關模式和連續工作模式;當增程器工作時,其功率輸出方式分為功率恒定輸出和功率隨動輸出2種模式,即增程器的工作模式和功率輸出方式可分為4種能量管理策略,見表1。
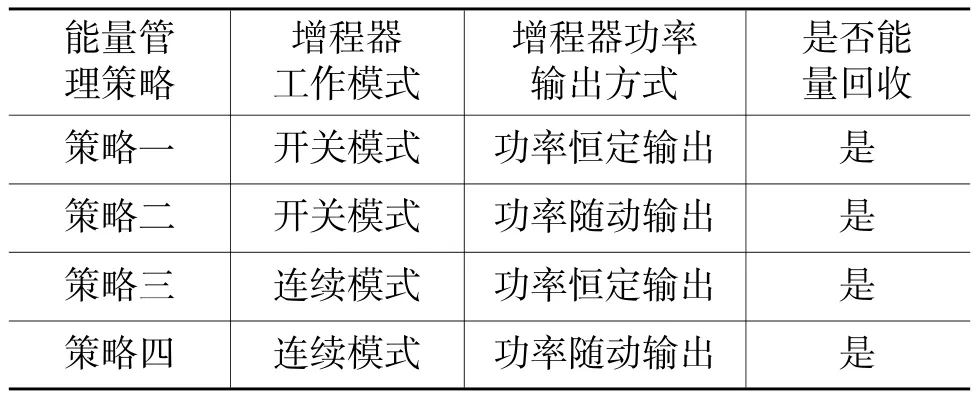
表1 增程式電動環衛車能量管理策略
在軟件Matlab/Simulink中搭建整車正向仿真模型,在模塊Simulink/Stateflow中實現增程器的啟停控制。同時考慮了行駛過程中的制動能量回收,當制動踏板在0~25%開度區間時,電機制動力按照線性規律變化,開度大于25%時電機制動力達到最大值。制動過程中,電機最大力矩的確定根據電池組最大充電電流和驅動電機發電能力來確定,經計算最大力矩值取為420 N·m。
考慮到環衛車經常在市區內行駛,所以仿真過程基于我國典型城市公交工況進行[8],并且利用約100 km的連續循環工況來模擬真實的行駛過程。
3.2 仿真結果與分析
動力電池的初始SOC設為0.5,仿真持續時間約為2.23×104s。
3.2.1 能量管理策略一
在策略一中,環衛車增程器工作在開關模式并且恒定地輸出功率,得到的仿真結果如圖6~圖10所示。由圖6可看出,由于駕駛員模型在行駛過程中不斷調整油門踏板和制動踏板開度,所以很好地跟蹤了設定的城市工況;由圖7可看出,在前0.56×104s,環衛車運行在純電動模式,直到SOC首次降至設定的下限值0.25時進入增程模式;增程器恒定地輸出40kW的功率,發動機工作在轉速為1 700 r/min、扭矩為250 N·m的工作點,整個過程中增程器開關5次,功率變化如圖8所示;電池組的充放電電流在-190~200 A內變化,如圖9所示;行駛過程中發動機的燃油消耗如圖10所示,行駛結束共消耗燃油22.74 L,電池組SOC由0.5變為0.31。將消耗的電池組電能折算為增程器的柴油消耗得到增程式電動環衛車等效百公里燃油消耗為29.13 L。
3.2.2 能量管理策略二
在策略二中,增程器工作在開關模式,但輸出功率隨行駛工況的需求不斷變化。為了避免發動機的頻繁起停并考慮到城市工況的平均功率,設置增程器的最小功率為20kW,最大功率為40kW,并且發動機沿最低燃油消耗曲線工作。圖11~圖16為能量管理策略二的仿真結果。由圖11可看出,駕駛員模型對工況的跟隨較好;由圖12可看出,車輛在前0.56×104s運行在純電動模式,此后進入增程模式,并且增程器的輸出功率跟蹤了工況需求功率,整個行駛過程中增程器開關3次(圖13);從圖14可看出,電池組的充放電電流在-150~200A內變化;發動機的油耗曲線見圖15。循環結束時,電池組SOC由0.5變為0.27,燃油消耗量為22.50L,發動機工作區域如圖16所示,車輛在整個循環中的等效百公里燃油消耗為30.25L。
3.2.3 能量管理策略三
在策略三中,增程器持續地輸出恒定功率,為了充分使用動力電池的電能并維持電池組荷電狀態,增程器功率設置為18kW,發動機轉速為1400r/min,扭矩為150 N·m,對應的比油耗為215 g/(kW·h)。圖17~圖21為能量管理策略三的仿真結果。由圖17可看出,駕駛員模型對工況跟隨較好;由圖18可看出,在0.56×104s時車輛由純電動模式進入增程模式并持續工作直到循環結束;電池組充、放電電流在-150~180 A內變化,見圖20;發動機燃油消耗曲線如圖21所示。循環結束時,發動機燃油消耗為21.78 L,電池組SOC變為0.27,由此計算得到的環衛車等效百公里油耗為29.53 L。
3.2.4 能量管理策略四
在策略四中,考慮到增程器工作在持續模式,為了盡可能利用電池組的電能從而使SOC維持在合理水平,同時考慮適當提高發動機的負荷以提高燃油經濟性,設置增程器輸出功率的上、下限分別為20 kW和25 kW,并且發動機沿最低燃油消耗曲線工作。
圖22~圖27為能量管理策略四的仿真結果。由圖22可看出,該仿真過程中駕駛員模型能夠較好地跟隨工況;由于電池組初始SOC為0.5,同前3種控制策略一樣,在0.56×104s時環衛車由純電動模式進入增程模式,SOC變化過程如圖23所示,可看出設置的增程器輸出功率除了滿足工況需求的功率外,還有部分給電池組進行充電,電池組SOC在進入增程模式后不斷提高;增程器輸出功率的變化如圖24所示;電池組充、放電電流的變化范圍為-150~200 A,見圖25;燃油消耗曲線在整個行駛過程中不斷上升,如圖26所示;發動機的工作區域如圖27所示。在循環結束時,SOC變為0.40,燃油消耗量為26.45 L,等效的百公里燃油消耗為29.82 L。
從油耗角度對比4種能量管理策略可知,策略一和策略三因發動機在最低油耗點附近工作,燃油消耗分別小于功率隨動模式下的策略二和策略四;定量比較4種能量管理策略的燃油消耗可知,在策略一中,增程器工作在開關—恒功率輸出模式,整車的等效百公里油耗最小,為29.13 L;在策略三中,盡管增程器工作在恒功率輸出模式,但發動機負荷率較小,工作點的比油耗相對稍高一些,致使其等效百公里油耗比策略一有所提高。
從電池組SOC的變化角度來看,增程器輸出功率設置較大時(如策略一),電池組SOC的增長率較迅速,增程器除滿足工況的功率需求還能給電池進行充電;而當增程器輸出功率較小時(如策略三),能夠使電池組SOC較為平穩地變化,從而避免電池組的頻繁充放電并達到延長使用壽命的目的。
4 結束語
在軟件Matlab/Simulink中搭建了增程式電動環衛車正向仿真模型,基于我國典型城市公交工況,分別對增程器開關模式、持續工作模式、增程器功率恒定輸出和功率隨動輸出4種能量管理策略進行了仿真。增程器在恒功率輸出模式下發動機可以在油耗較低的工作點附近運行,燃油消耗率分別小于功率隨動模式時的油耗,其中增程器開關—功率恒定輸出策略下的等效百公里油耗最小,可達到29.13 L。設置較小的增程器輸出功率,能夠使電池組SOC較為平穩地變化,從而避免電池組的頻繁充放電現象,有利于延長其使用壽命。
1陳漢玉,左承基,滕勤,等.增程式電動轎車動力系統的參數匹配及試驗研究.農業工程學報,2011,27(12): 69~73.
2周蘇,牛繼高,陳鳳祥,等.增程式電動汽車動力系統設計與仿真研究.汽車工程,2011,33(11):924~929.
3李獻菁,孫永正,鄧俊,等.插電式串聯混合動力汽車發動機起停控制策略的優化.汽車工程,2011,33(2): 112~117.
4吳曉剛,盧蘭光.插電式串聯混合動力汽車的系統匹配與仿真.汽車工程,2013,35(7):573~618.
5胡明寅,楊福源,歐陽名高,等.增程式電動車分布式控制系統的研究.汽車工程,2012,34(2):197~202.
6Rousseau A,Pagerit S,Gao D.Plug-in hybrid electric control strategy parameter optimization.23rd International Electric Vehicle Symposium,EVS23,2007.
7Wu Xiaogang,Lu Languang.Comparsion of two APU configurations for series HEV.Journal of University of Science and Technology of China,42(10):820~827,2012.
8中國汽車技術研究中心.QC/T759—2006汽車試驗用城市運轉循環.中華人民共和國行業標準,2006.
(責任編輯文楫)
修改稿收到日期為2013年12月17日。
Simulation and Research of Energy Management Strategy for A Range-extended Electric Sanitation Truck
Xie Shaobo1,2,Liu Xibin1,Wang Jia1,Wei Lang2
(1.Shaanxi Automobile Group;2.Chang′an University)
Based on Matlab/Simulink,the forward simulation model is conducted for a range-extended electric sanitation truck.Four energy management strategies of range-extender,including switching mode,continuous operating mode,constant power output mode and power servo output mode are simulated continuously for 100 km in typical urban public transport conditions.The results show that both the switching mode and the continuous operating mode can make the battery SOC work on a reasonable interval;but the constant power output mode has less fuel consumption than the power servo output mode with the minimum of 29.13 L.In addition,setting low output power of the range-extender can keep the state-of-charge of battery pack vary stably and avoid the frequent switch between the charge and discharge.
Range-extended sanitation truck,Energy management strategy,Simulation
增程式電動環衛車能量管理策略仿真
U469.72
A
1000-3703(2014)07-0048-06
國家高技術研究發展計劃項目(2012AA111106)。
猜你喜歡
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
汽車維修與保養(2020年11期)2020-06-09 05:42:06
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
汽車維護與修理(2016年3期)2016-02-28 13:16:54
汽車維修與保養(2015年1期)2015-04-17 03:25:30
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年6期)2014-02-27 12:10:49
汽車與新動力(2014年5期)2014-02-27 12:10:41
汽車與新動力(2014年2期)2014-02-27 12:10:15