超聲波測距的模糊控制泊車系統(tǒng)模型設(shè)計(jì)*
2014-07-03 03:33:16千承輝苗紅松付玉靜康寧
單片機(jī)與嵌入式系統(tǒng)應(yīng)用 2014年9期
千承輝,苗紅松,付玉靜,康寧
(吉林大學(xué) 儀器科學(xué)與電氣工程學(xué)院,長春130022)
引 言
近年來隨著經(jīng)濟(jì)的發(fā)展,擁有汽車的家庭越來越多,對于經(jīng)驗(yàn)不足的駕駛員來講,在擁擠的停車場、車庫以及路邊實(shí)現(xiàn)安全泊車的問題越來越突出。自動泊車系統(tǒng)[1-7]的出現(xiàn)提高了泊車過程的準(zhǔn)確度。相對于國外研發(fā)的自主泊車系統(tǒng),目前國內(nèi)關(guān)于自動泊車系統(tǒng)的研究仍處于初級階段,僅有少數(shù)的高檔轎車上才配有自動泊車輔助系統(tǒng)[8]。設(shè)計(jì)泊車系統(tǒng)模型對泊車控制算法進(jìn)行驗(yàn)證,可以為真實(shí)車輛研發(fā)自動泊車系統(tǒng)提供一定理論依據(jù),促使自動泊車系統(tǒng)代替駕駛員觀察并判斷,實(shí)現(xiàn)自動泊車到位,從而減少泊車事故的發(fā)生。
1 原理與算法
1.1 超聲波測距原理
超聲波是頻率高于20 000 Hz的聲波,它指向性強(qiáng),在介質(zhì)中傳播的距離較遠(yuǎn),因而超聲波經(jīng)常用于距離的測量。利用超聲波檢測往往比較迅速、方便、計(jì)算簡單、易于做到實(shí)時(shí)控制。通過超聲波發(fā)射裝置向某一方向發(fā)射超聲波,超聲波發(fā)射的同時(shí)開啟計(jì)時(shí)器計(jì)時(shí),超聲波在空氣中傳播,途中碰到障礙物就立即返回來,超聲波接收器收到反射波后立即停止計(jì)時(shí)。通過超聲波在空氣中傳播的速度v和計(jì)時(shí)器所記錄的時(shí)間t,利用公式
s=v×t/2
就可以計(jì)算出發(fā)射點(diǎn)距障礙物的距離s。
本系統(tǒng)對測量精度要求較高,由于超聲波傳播的速度受溫度變化的影響較大,所以采用溫度補(bǔ)償?shù)姆椒▽囟冗M(jìn)行校正。由下面計(jì)算公式得到:

其中:τ為攝氏溫度。
系統(tǒng)使用8個超聲波裝置分別放置在模型車四周組成環(huán)境測量裝置,可以對環(huán)境中車位精確定位以及由周圍環(huán)境獲取車身姿態(tài)角,保證了系統(tǒng)的可靠性。
1.2 運(yùn)動模型建模
為了更加直觀、簡便地求解自動泊車這一特殊的行車過程,對模型小車建立車輛運(yùn)動學(xué)模型,即把小車簡化成一個矩形的剛體,建立基于阿克曼轉(zhuǎn)向幾何的小車運(yùn)動學(xué)模型[9-11]。對于本文研究的小車模型,可將其簡化為兩輪車模型,以車輛前后軸中點(diǎn)為參考來描述車輛的運(yùn)動,建立的阿克曼轉(zhuǎn)向模型如圖1所示。

圖1 阿克曼轉(zhuǎn)向模型
圖中(xf,yf)、(xr,yr)分別表示車輛前、后軸中點(diǎn)坐標(biāo);φ表示前輪轉(zhuǎn)角;θ表示車身航向角;l表示車輛軸距;vr表示后軸中心點(diǎn)速度,化簡的車輛運(yùn)動學(xué)方程組為:
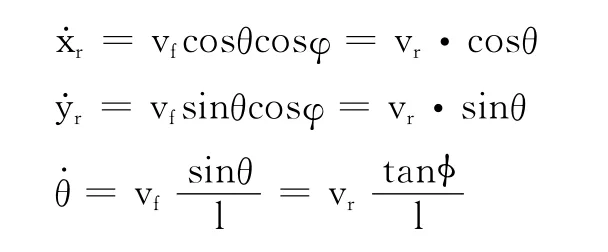
由以上運(yùn)動學(xué)方程組分析得:在低速運(yùn)動下,模型車的后軸中心點(diǎn)運(yùn)動軌跡為一個定圓,且該圓半徑僅與車輛前輪轉(zhuǎn)角φ有關(guān)。
設(shè)計(jì)中根據(jù)實(shí)際車輛大小,按比例設(shè)計(jì)小車模型及泊車環(huán)境,并且在Matlab/Simulink中建立阿克曼轉(zhuǎn)向模型,為下面的模糊控制器器設(shè)計(jì)提供了良好的理論依據(jù)。
1.3 自動泊車模糊控制器設(shè)計(jì)
模糊控制是以模糊語言變量、模糊集合理論及模糊推理為基礎(chǔ)的一類計(jì)算機(jī)控制方法,適合用于數(shù)學(xué)模型復(fù)雜的系統(tǒng)。模糊控制繼承了人類對概念模式和思維圖像的自然語言習(xí)慣,相比其他傳統(tǒng)的控制方法,模糊控制在自動泊車系統(tǒng)中的應(yīng)用更加廣泛[12]。自動泊車模糊控制器[13-16]設(shè)計(jì)包括垂直泊車模糊控制器設(shè)計(jì)、平行泊車模糊控制器設(shè)計(jì)和斜行泊車模糊控制器設(shè)計(jì),由于三種控制器設(shè)計(jì)方式類似,本文以垂直泊車為例討論模糊控制器設(shè)計(jì)。本設(shè)計(jì)的模糊自動泊車系統(tǒng)控制框圖如圖2所示。
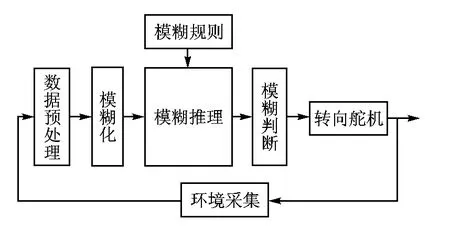
圖2 模糊自動泊車系統(tǒng)控制框圖
其中模糊化、模糊推理、模糊判斷和模糊規(guī)則4部分構(gòu)成模糊控制器。CPU主要通過以下3個步驟實(shí)現(xiàn)模糊控制:
①首先通過超聲波陣列獲取車輛后軸中心點(diǎn)坐標(biāo)(xr,yr)和車身航向角θ,將超聲波傳感器采樣到的數(shù)據(jù)進(jìn)行模糊化。
②根據(jù)模糊控制規(guī)則,結(jié)合駕駛員的實(shí)際泊車經(jīng)驗(yàn)推理計(jì)算出模糊控制量。
③對模糊控制量進(jìn)行判決,得出確切的輸出量給轉(zhuǎn)向舵機(jī),控制模型車前輪轉(zhuǎn)向。
通過對上述模糊控制器進(jìn)行仿真分析,在實(shí)際運(yùn)行中適當(dāng)進(jìn)行調(diào)整,反復(fù)調(diào)試最終實(shí)現(xiàn)精確泊車控制。
2 硬件設(shè)計(jì)與仿真
本設(shè)計(jì)硬件電路主要包括飛思卡爾K60最小系統(tǒng)模塊設(shè)計(jì)、超聲波電路設(shè)計(jì)、轉(zhuǎn)向電機(jī)驅(qū)動電路設(shè)計(jì)、直流電機(jī)驅(qū)動電路設(shè)計(jì)、語音模塊電路設(shè)計(jì)。硬件系統(tǒng)電路框圖如圖3所示。
車輛駛過停車位置時(shí),超聲傳感器的信號由控制器接收,從而識別并存儲車位的尺度信息,建立泊車區(qū)域的地圖。啟動泊車系統(tǒng),核心控制器控制舵機(jī)驅(qū)動電路驅(qū)動轉(zhuǎn)向舵機(jī),由雙軸陀螺儀采集舵機(jī)轉(zhuǎn)角反饋到核心控制器,形成PID閉環(huán)控制,獲得精確的前輪轉(zhuǎn)角控制量φ。直流電機(jī)驅(qū)動電路驅(qū)動直流電機(jī),由編碼器獲取當(dāng)前的速度反饋給核心控制器,行車第2個PID閉環(huán)控制,使車速平穩(wěn),系統(tǒng)更加穩(wěn)定。泊車過程中,由攝像頭獲取倒車影像存儲到核心控制器K60的內(nèi)部DMA控制器中,最后顯示在顯示器上。當(dāng)發(fā)現(xiàn)合適停車位和泊車結(jié)束時(shí),控制語音模塊進(jìn)行語音提醒,使系統(tǒng)更加智能化。
2.1 直流電機(jī)驅(qū)動電路
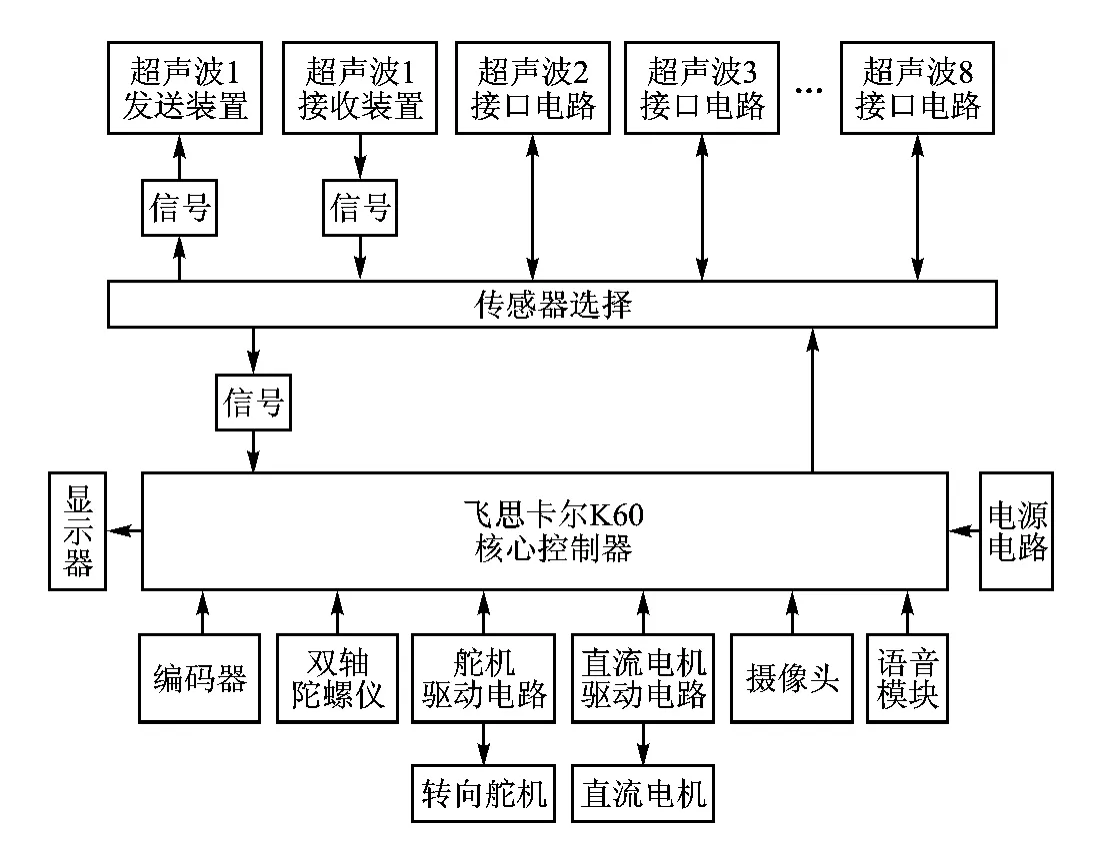
圖3 硬件系統(tǒng)電路框圖
直流電機(jī)驅(qū)動電路主要用來控制直流電機(jī)的轉(zhuǎn)動方向和轉(zhuǎn)動速度。可以通過改變直流電機(jī)兩端的電壓來控制電機(jī)的轉(zhuǎn)向;而控制直流電機(jī)的轉(zhuǎn)速則有不同的方案,常規(guī)的方法則是采用PWM控制。驅(qū)動電路直接選用英飛凌大功率驅(qū)動芯片BTS7960組成的全H橋驅(qū)動模塊。BTS7960內(nèi)含電流檢測電路、控制驅(qū)動電路,以及1個P型和1個N型MOSFET管,可以靈活應(yīng)用于2相或3相、直流有刷或無刷電機(jī)的控制驅(qū)動電路中,不僅可以簡化電路設(shè)計(jì),而且使得控制更加簡單。電機(jī)驅(qū)動原理圖如圖4所示。
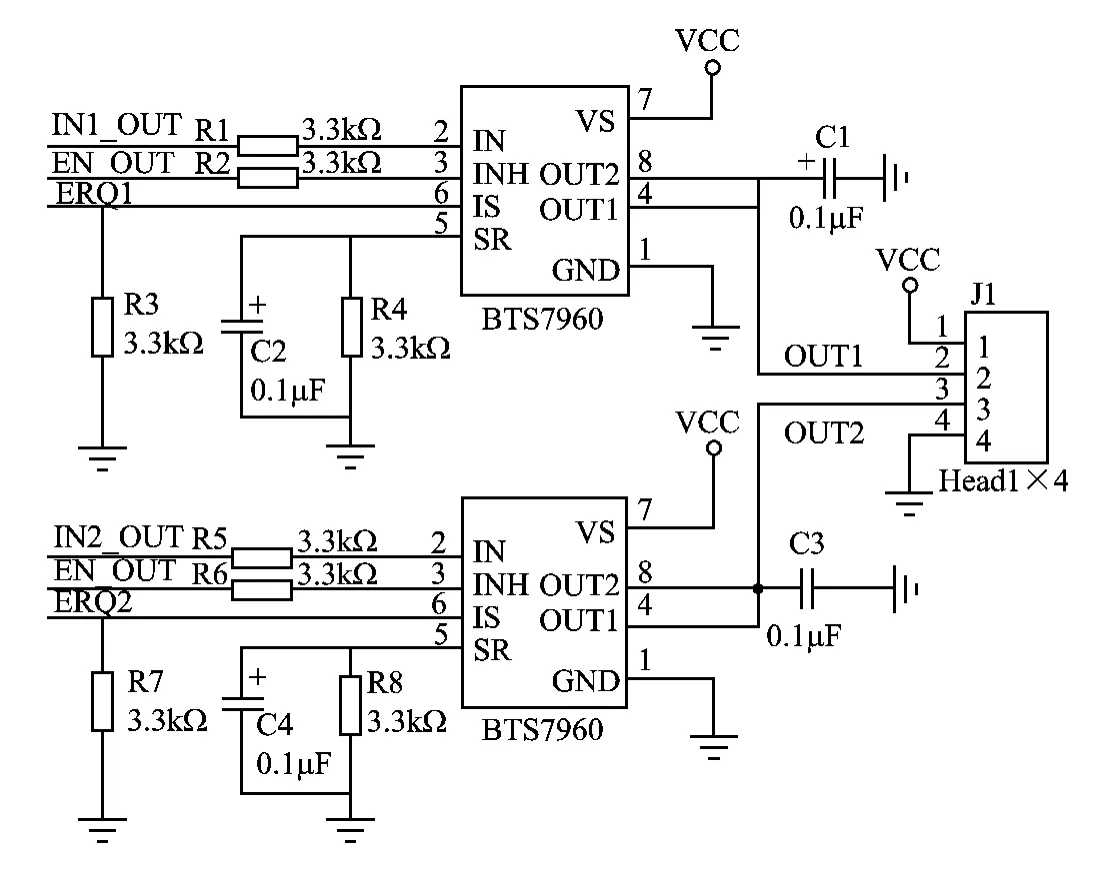
圖4 直流電機(jī)驅(qū)動原理圖
2.2 電源電路
電源電路的穩(wěn)定性對系統(tǒng)的穩(wěn)定性起決定性的作用,電源電路為不同的模塊電路提供不同等級的電壓。本模型車設(shè)計(jì)需要3.3 V、5 V、12 V三個等級電壓。電源由12 V鋰離子電池提供。電源電路原理圖如圖5所示。
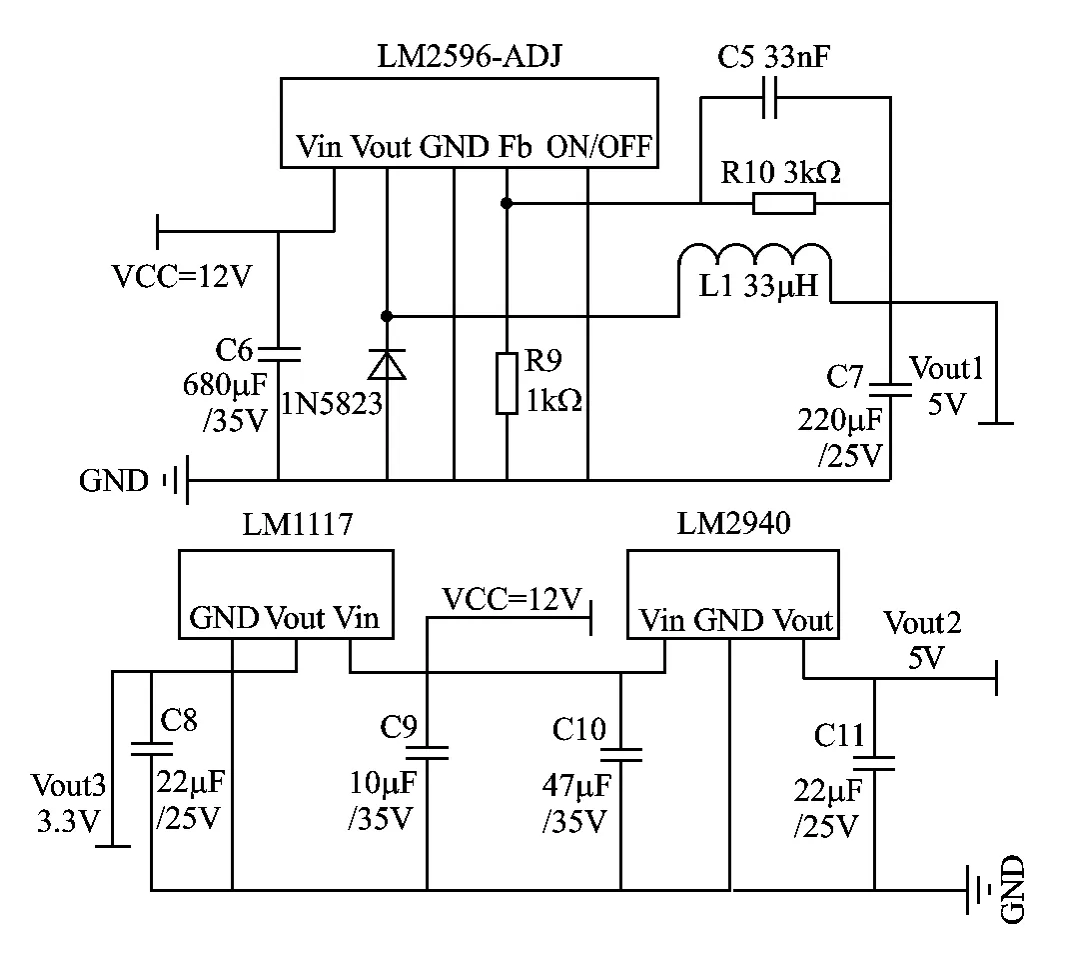
圖5 電源電路原理圖
系統(tǒng)采用LM1117芯片對12 V電壓降壓到3.3 V,為飛思卡爾單片機(jī)供電;串聯(lián)穩(wěn)壓芯片LM2940穩(wěn)壓,輸出5 V電壓,為CMOS攝像頭、超聲波模塊和液晶屏顯示器供電。舵機(jī)驅(qū)動采用穩(wěn)壓可調(diào)芯片LM2596-ADJ穩(wěn)壓至5 V,接入舵機(jī)驅(qū)動模塊,以驅(qū)動舵機(jī)轉(zhuǎn)向舵機(jī)。
3 系統(tǒng)軟件設(shè)計(jì)
自動泊車系統(tǒng)模型,啟動自動泊車系統(tǒng)后,選擇垂直、平行和斜行3種泊車方式,超聲波測距得到車輛后輪軸中心坐標(biāo)(xr,yr)和前輪轉(zhuǎn)角φ以及車身航向角θ,輸入模糊控制器中控制車輛倒車運(yùn)行狀態(tài),實(shí)現(xiàn)自動泊車。系統(tǒng)軟件流程圖如圖6所示。
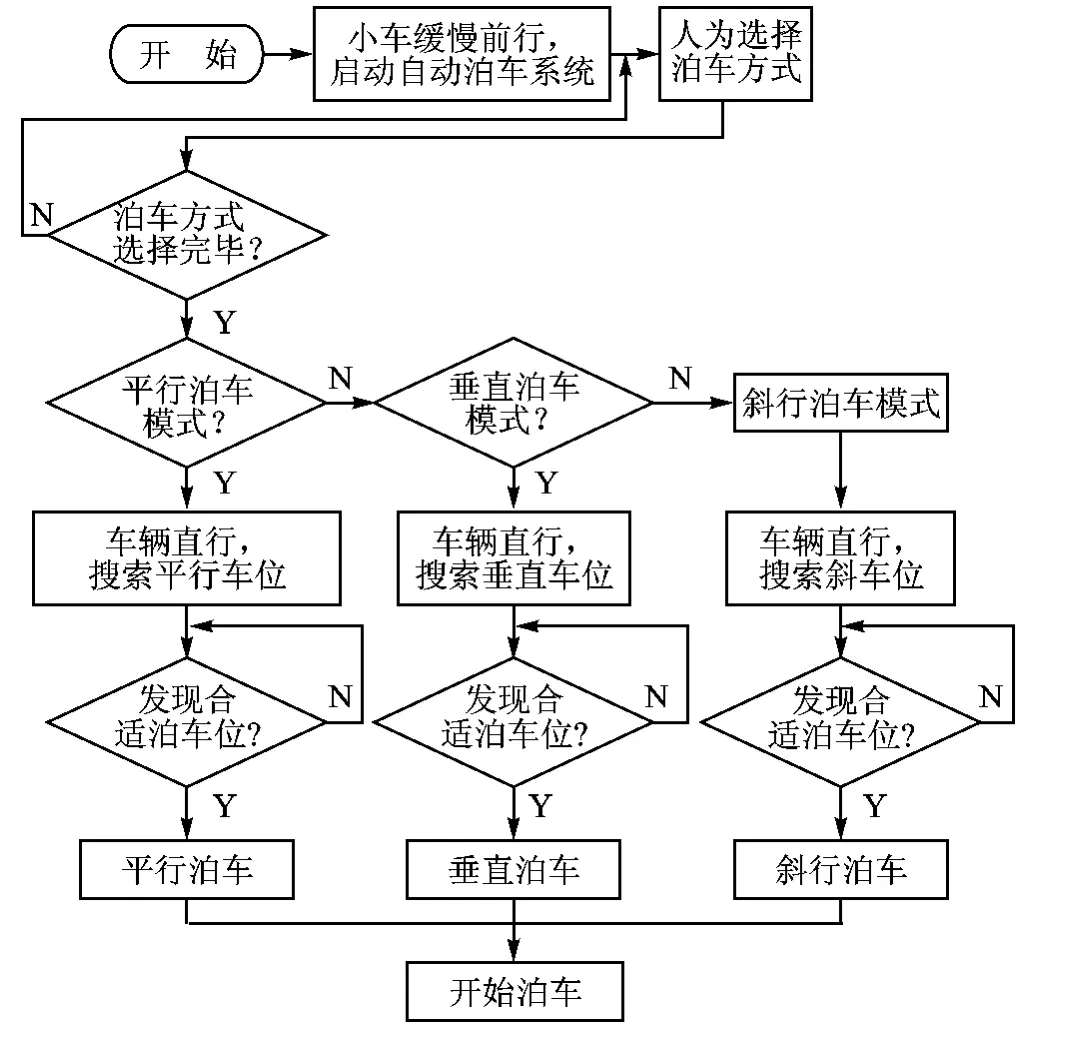
圖6 系統(tǒng)軟件流程圖
自動泊車系統(tǒng)啟動泊車操作,由超聲波感知周圍環(huán)境信息,通過模糊控制實(shí)現(xiàn)泊車入庫,圖7為自動泊車子系統(tǒng)流程圖。

圖7 自動泊車子系統(tǒng)流程圖
4 測試與分析
本設(shè)計(jì)建立基于超聲波測距的模糊控制泊車系統(tǒng)模型,通過超聲波測量車輛模型后輪軸中心點(diǎn)坐標(biāo)作為泊車的起始位置,在Matlab Simulink建立車輛運(yùn)動學(xué)模型和模糊控制器,并對自動泊車過程進(jìn)行仿真,驗(yàn)證了模糊控制器設(shè)計(jì)的合理性和本設(shè)計(jì)的準(zhǔn)確性。其中Matlab Simulink仿真結(jié)果如圖8所示。
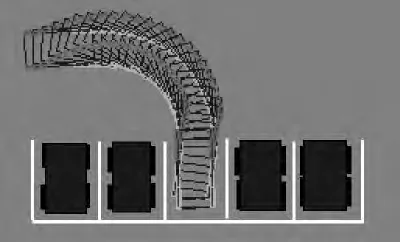
圖8 垂直泊車Matlab Simulink仿真結(jié)果
在軟件仿真的基礎(chǔ)上進(jìn)行硬件電路設(shè)計(jì),同時(shí)以2個同等大小模型車作為參考車,兩紙盒中間按實(shí)際車庫比例預(yù)留空車位,由搭建好的模型進(jìn)行實(shí)際模型車測試,測試結(jié)果如表1所列。
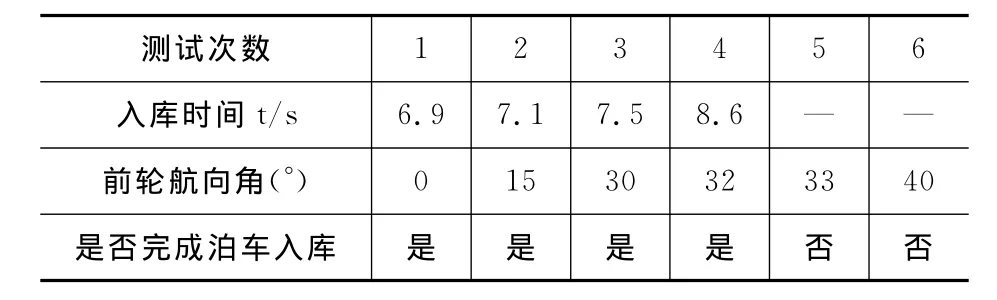
表1 垂直泊車實(shí)測結(jié)果
由測試結(jié)果可以看出,模型車航向角控制在0~32°范圍內(nèi),小車模型均可實(shí)現(xiàn)快速自動泊車,泊車入庫精度高,系統(tǒng)穩(wěn)定性好。當(dāng)航向角大于32°時(shí),由于車身傾斜造成超聲波傳感器對實(shí)際距離的檢測失去一定的準(zhǔn)確性,從而使模型車對車位以及自身所處位置造成誤判斷,最終導(dǎo)致泊車失敗。在進(jìn)行平行和斜行式泊車測試時(shí),出現(xiàn)相同的情況。對超聲波模塊以不同角度斜面進(jìn)行距離測試,由測試結(jié)果可知,當(dāng)航向角大于32°時(shí),由于超聲波測距造成的誤差使得自動泊車系統(tǒng)造成車位誤判斷。
結(jié) 語
設(shè)計(jì)的自動泊車系統(tǒng),不僅能夠完成模型小車自動尋找最小空車位,采用模糊控制法實(shí)現(xiàn)3種停車位的泊車,而且采用語音模塊實(shí)現(xiàn)語音提醒,以及在車載顯示屏上顯示倒車后面的路況信息,使實(shí)驗(yàn)室泊車系統(tǒng)模型設(shè)計(jì)更加人性化、智能化。
[1]林志杰.基于空間位置重構(gòu)的自動泊車系統(tǒng)研究[D].北京:北京工業(yè)大學(xué),2012.
[2]蔣志文,曾柿.基于雙目視覺和路徑規(guī)劃的車輛自動泊車系統(tǒng)[J].公路與汽運(yùn),2008(4):19-315.
[3]宋金澤.自主泊車系統(tǒng)關(guān)鍵技術(shù)研究 [D].長沙:國防科技大學(xué),2009.
[4]何建國,張文勝,趙根莊.智能泊車引導(dǎo)方法的研究與實(shí)現(xiàn)[J].地理空間信息,2007,5(2):3-5.
[5]付菊芳,張小龍,東亞斌.國外汽車自動停車系統(tǒng)的介紹與分析[J].中國科技信息,2009(2):26-259.
[6]何峰.一種應(yīng)用于自動泊車系統(tǒng)的車位檢測方法[J].傳感器世界,2009,3(1):24-27.
[7]楊昔陽,尤晴曦,李洪興.基于變論域理論的自動倒車控制[J].北京師范大學(xué)學(xué)報(bào):自然科學(xué)版,2005,41(4):348-350.
[8]孫博遜.基于超聲波測距的自動泊車輔助系統(tǒng)[D].長春:長春理工大學(xué),2011.
[9]姜輝,郭孔輝.自動平行泊車系統(tǒng)轉(zhuǎn)向控制策略的研究[D].吉林:吉林大學(xué),2010.
[10]吳冰.自動泊車路徑仿真和運(yùn)動控制研究[D].合肥:合肥工業(yè)大學(xué),2012.
[11]周健.嵌入式模糊自動泊車系統(tǒng)的研究[D].廣州:廣東工業(yè)大學(xué),2011.
[12]于偉,張乃堯,白帆.泊車問題的模糊優(yōu)化控制方案[J].機(jī)電一體化,2001(5).
[13]常江.基于遺傳算法的模糊控制器設(shè)計(jì)及應(yīng)用[D].西安:西北工業(yè)大學(xué),2006.
[14]雷英杰,張善文,李續(xù)武,等.MATLAB遺傳算法工具箱及應(yīng)用[M].西安:西安電子科技大學(xué)出版社,2005.
[15]孟惠霞,耿俊梅.基于MATLAB的模糊控制汽車倒車仿真系統(tǒng)[J].中原工學(xué)院學(xué)報(bào),2009,20(1):75-77.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
