水下礁石自動探測軟件研發
2014-07-02 01:37:21王雪波楊明遠
水道港口 2014年6期
關鍵詞:單片機
王雪波,楊明遠
(1.廣東省廣州航道局,廣州510275;2.廣東省航道局,廣州510115)
水下礁石自動探測軟件研發
王雪波1,楊明遠2
(1.廣東省廣州航道局,廣州510275;2.廣東省航道局,廣州510115)
針對當前水下礁石探測存在的工效低、準確度差的問題,依托科研項目研制了礁石探測設備,配合該設備開發了礁石自動探測軟件。該軟件由單片機程序和PC端程序組成,能夠自動控制和實時監視鉆機的運行。根據鉆進速度與巖土堅固程度相對應的原理,自動判定水下礁石的存在,同時自動采集、記錄礁石點的坐標和高程等數據。結果表明,軟件測控功能多樣、測控結果準確,成套設備的自動化程度高。
礁石探測;測控設備;單片機;軟件開發
在港口、航道、水利工程中,常需對水下礁石進行探測,探明礁石的存在、測量礁石高程和平面坐標、計算礁石的體積,為工程的可行性分析、工程概算、施工設計等提供必要的資料。由于水下礁石探測點多、環境復雜(受水深、水流、覆蓋層和通航等條件影響),因此就要求礁石探測應具有快速性、準確性和低成本[1]。目前,國內外用于探測水下礁石的設備和技術可分為兩類,第一類是接觸式探測技術,有人工釬探、工程地質鉆探、坑探、標準貫入試驗、動力觸探等;第二類是非接觸式探測技術,有超聲波淺地層剖面探測、高密度電法物探、水下攝影、機器人水下成像[2]、水下地形遙測[3]等。接觸式探測技術中,人工釬探難以應付礁石上方的覆蓋層以及水深大、水流急等工況,而地質鉆探、坑探、標貫試驗、動力觸探等主要存在速度慢、成本高的問題。非接觸式探測技術中,淺地層剖面儀、高密度電法等雖然具有快速性,但由于受影響因素較多,且不能直接獲得礁石的工程特性指標;而水下攝影、成像、地形測量等技術也難以探測埋于覆蓋層下的礁石,更無法了解礁石的工程技術特性。這些方法對于礁石探測的目的和要求都存在明顯不足。為此,依托廣東省交通運輸廳科技項目,專門研制了一套準確、快速、低成本、適用范圍廣的水下礁石探測設備。該設備主要包括能固定于河床上的船舶以及安裝于船上的礁石探測鉆機。探測作業時,以標準的鉆進測試條件控制鉆機運行,精確測定鉆進速度(簡稱鉆速),根據鉆速與巖土堅固程度相對應的原理[1],將實時的鉆速與礁石的特征鉆速相比較,判定水下礁石的存在,測定礁石點的坐標和高程等數據。要高效地完成上述探測工作,必須解決好鉆機的自動控制和大量數據的實時處理等問題,這些問題將由計算機來完成。因此開發了本套軟件,稱為礁石自動探測軟件。
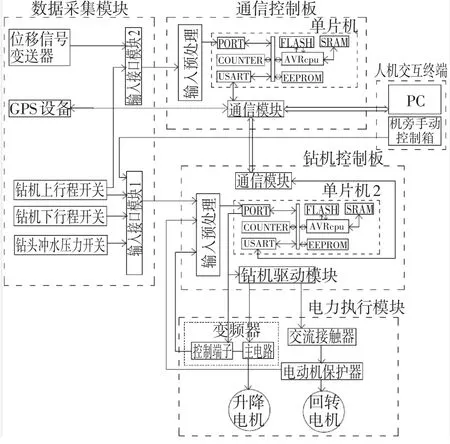
圖1 礁石自動探測硬件系統圖Fig.1 Automatic detection hardware system of underwater reef
1 礁石自動探測軟件開發
軟件開發與所采用的硬件及被測控的對象密切相關,本硬件系統由數據采集模塊、鉆機控制板、通信控制板、電力執行模塊、GPS設備、PC等組成(圖1)[1];根據各設備的接口特點,PC、GPS設備和單片機之間采用RS232通信。被測控的對象是4臺相同的鉆機,它主要由主機、升降卷揚機等組成(圖2)。
為提高程序運行速度和可靠性,礁石自動探測軟件由兩部分組成:PC端軟件和單片機軟件,PC端軟件又分主程序和數據庫兩部分。PC端軟件可運行在Windows XP或Windows 7,單片機軟件運行在鉆機控制板和通信控制板上的嵌入式單片機上,單片機采用8位的AVR ATmega 88。PC端軟件采用VB6語言編寫,單片機軟件采用C語言編寫,數據庫選用Microsoft Office Access。VB6是可視化面向對象的事件驅動的程序設計語言,適于開發工控領域的Windows應用程序。
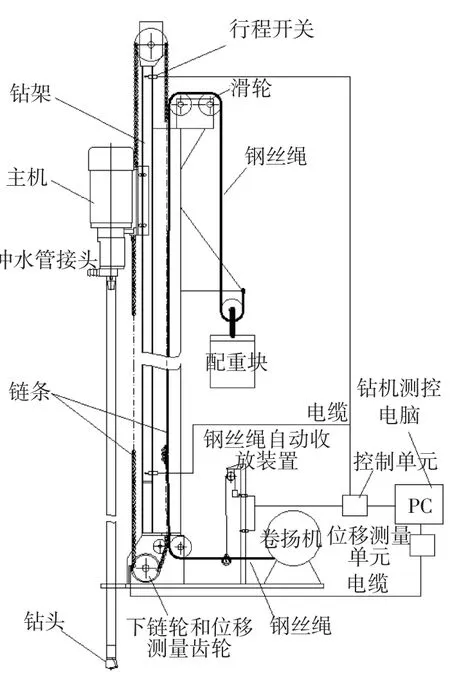
圖2 礁石探測鉆機原理圖Fig.2 Working principle of drilling rigs
1.1 需求分析
根據硬件配置情況、礁石識別原理以及礁石探測要求,對礁石自動探測的需求進行分析。
(1)監視(顯示)功能。可在PC端主界面上,實時顯示鉆頭行程(S)、高程(H)、鉆速(V);實時顯示高程-時間(H?t)曲線,并在曲線上實時顯示發現的礁石點;實時顯示被監視對象的各種運行狀態,包括鉆頭沖水壓力、鉆機行程開關、鉆頭轉動、聯機/脫機等狀態;顯示潮(水)位(Hc)、船位編號、鉆機編號、鉆桿長度等必要的參數。
(2)操作控制功能。可用鼠標點擊按鈕或用鍵盤快捷鍵控制鉆機的運行、停止。
(3)參數設置功能。可設定礁石識別指標即礁石的特征鉆速(V0);潮(水)位(HC);探測底標高(H0);施工項目名稱;船位編號;鉆桿長度(L);船縱軸線的方位角(θ);鉆機、GPS天線相對位置的修正參數等。確定V0有兩個方法,一是先用配套的水下取芯鉆具實地提取水下巖芯,找到并作為礁石樣本,用本探測鉆機測定其鉆速,即為V0;二是直接取V0=0,因為取用了帶特制錐頭的鉆頭,試驗證明,抗壓強度fr≥25MPa的巖石其鉆速都可視作為零[1]。HC可通過設置水位站(驗潮站)取得數據,也可通過裝于船上的RTK設備計算出實時的平均潮位。
(4)繪圖功能。可繪制鉆頭高程-時間(H?t)曲線;在H?t圖中繪制任意兩點的直線,并顯示該兩點的高程差、時間差和該直線的斜率(即鉆速平均值);H?t曲線可在PC中回放。
(5)鉆頭高程測量功能。接收與鉆頭聯動的位移變送器數據(包括大小和方向),轉換為鉆頭離開初始位置的行程(S),再轉換為鉆頭高程(H)。行程只與位移有關,可由單片機完成;高程與HC及鉆機在船上相對位置有關,應由PC完成。
(6)鉆速計算功能。實時計算連續T秒內的鉆速平均值(Vt)。
2.3 凈化條件的優化 選用3種不同的固相萃取柱Strata-X柱、HLB柱和C18柱進行凈化效果分析比較,結果顯示,Strata-X柱OA、DTX1、DTX2回收率都可以達到70%以上。HLB柱和C18柱3種DSP各目標組分的回收率都低于60%。因此綜合考慮,最終選擇的固相萃取柱為Strata-X柱。
(7)礁石識別功能。比較Vt和V0,當Vt≤V0時,判斷為礁石。
(8)自動控制功能。控制4臺鉆機按次序且相隔5 s依次啟動。如某臺鉆機遇到礁石,則控制鉆機停止鉆進并自動返回至初始點;如沒有遇到礁石,則當達到設定的探測深度或達到鉆機自身最大行程時,停止鉆進并自動返回。控制指令應由PC發出,由單片機處理,最終由鉆機驅動模塊執行。
(9)采集GPS數據。船上有1根GPS天線,要求能采集GPS坐標數據,并將WGS84坐標轉換成工程上常用的坐標系(如西安80坐標);再根據方位角(θ)算出各鉆孔坐標。
(10)數據存貯功能。探測過程的關鍵數據保存于數據庫文件中。要求每0.5 s記錄一次鉆進測試數據(包括數據編號、記錄時刻、船位編號、鉆機號、鉆孔坐標、鉆頭高程(即礁石或孔底高程)、鉆機上下行方向、鉆頭狀態(是否旋轉)、鉆速、是否遇到礁石等。
(11)數據導出功能。導出前述存貯的數據,可按條件篩選排列,以TXT或Excel格式導出。
(12)保護和報警功能。可設定鉆機最大行程,當達到此值時停止鉆進,代替下行程開關的作用;當鉆頭沖水壓力不足、回轉電機過載(如鉆頭卡死)時,自動停止回轉,并以紅色標示其運行狀態。

圖3 礁石自動探測PC端程序流程總圖Fig.3 Flow chart of PC program of automatic detection software
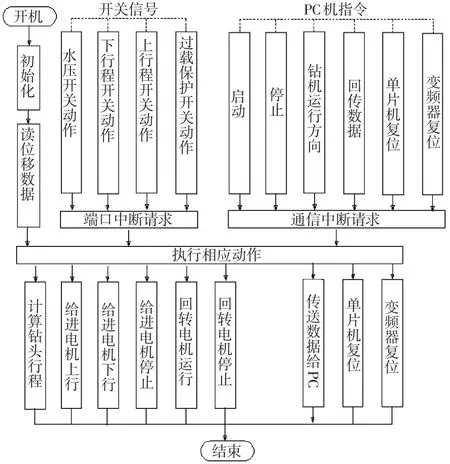
圖4 礁石自動探測單片機控制程序流程總圖Fig.4 Flow chart of single chip microcomputer of automatic detection software
1.2 軟件關鍵流程圖
根據上述需求分析,設計、優化總體的數據結構和關鍵的算法。將PC端軟件和單片機軟件分為若干個結構模塊(子程序),制定其程序流程總圖。
(1)PC端軟件的程序流程總圖如圖3所示。PC端軟件主要有13個子程序:人機交互、定時器中斷、回傳數據、高程(H)計算、H?t曲線生成、平均鉆速(Vt)計算、礁石識別(實時Vt與V0比較)、GPS坐標系轉換、鉆機運行控制指令、H?t分析、數據(含曲線)實時顯示、參數設置、成果數據存貯生成與導出等。每個子程序都有各自的算法,其中GPS坐標系轉換(七參數計算)采用矩陣最小二乘法和數學迭代法[4]。
(2)單片機分為控制單片機和通信單片機兩種,對應地單片機軟件分為兩類:負責鉆機運行的控制程序和負責通信的通信程序。圖4為單片機控制程序流程總圖。單片機軟件主要有6個子程序:位移數據采集、行程計數、鉆機運行狀態采集、鉆機運行(啟動、停止)控制、單片機與GPS通信、單片機與PC通信等。
1.3 自動控制與礁石識別流程圖
要求礁石探測作業準備就緒,包括船舶定好位、接妥鉆桿、設定好各參數,4臺鉆機都升至最高點(初始位置)后,運行PC端的礁石自動探測程序,鉆機能自動運行,自動識別礁石,自動返回。自動控制和礁石識別必須由PC和單片機協同完成。其中的自動控制與礁石識別程序是本套軟件最重要的程序,其流程圖如圖5所示。
本程序設計采用面向對象、事件驅動的方式。通過增加定時器事件,使事件合理可控地發生。程序主要采取了以下一些算法:
(1)在自動運行模式下,單片機控制4臺鉆機相隔5 S依次啟動,避免同時啟動產生過大的電流。
(2)PC端主程序設置“定時器1”和“定時器2”,定時讀取單片機上的鉆頭位移計數值(Sum),算出鉆頭行程S,再根據Hc和鉆頭初始高程值換算成鉆頭實時高程(H)。
(3)計算給定時間T秒內的平均鉆速(Vtt)。
T可在參數設置窗口中在0~20 s任意設定。Vt值的計算周期取0.5 s。
(4)比較Vt與礁石特征鉆速V0,判別礁石。判定為礁石時發出指令,控制鉆機停止鉆進并自動返回至初始點;如沒遇到礁石,則當達到設定的探測深度(H0)或最大行程時,停止鉆進并自動返回。
(5)實時繪制H?t曲線,每0.5 s更新一次,如鉆到礁石,則在曲線上標記所認定的礁石點。
1.4 數據庫
采用Microsoft Office Access數據庫,將它分成11個表,分別為項目表、高程表、GPS參數表、船位參數表、系統參數表、其他參數表、登陸密碼表、校正表、施工界限表、七參數表和礁石標記表。各子程序通過Active X對象(ADO)組件和結構化查詢語言(SQL)操縱數據庫。
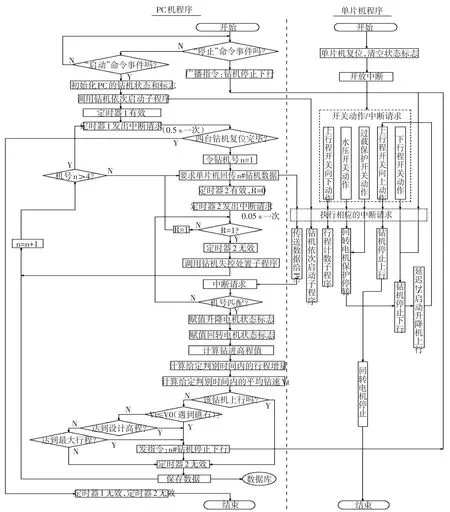
圖5 自動控制與礁石識別程序流程圖Fig.5 Flow chart of automatic control and reef recognition procedure
2 礁石自動探測軟件的應用效果
根據程序流程圖和算法,用VB6.0語言編寫程序代碼,進行程序聯機調試,經反復修改完善,完成礁石自動探測軟件的開發。2012年4月和2013年4月,本套軟件連同成套探測設備,兩次投入廣東省西江中游航道整治工程實施礁石探測作業。應用時,根據工況條件,先進入PC端各參數設置界面設好各參數(V0、Hc、H0、L、θ、坐標系等);準備就緒后,點擊“運行”按鈕,4臺鉆機便依次自動運行;運行中測量鉆頭行程、高程,計算鉆速(Vt),比較Vt、V0,自動判別礁石的存在,自動采集并轉換GPS坐標,存貯所需數據。實現了鉆機自動控制、自動監測和自動識別礁石的目標。
PC端主界面如圖6所示,主界面上能夠實時監視鉆機運行的各種狀態,包括聯機、水壓、行程開關、礁石判別、鉆頭回轉等狀態;能實時顯示鉆頭行程(S)、高程(H)、鉆速(Vt)、潮(水)位(Hc)、底標高(H0)等關鍵參數;主界面上右擊H?t曲線即可打開其分析窗口,能進行H?t圖放大、覆蓋層厚度測量、任兩點平均鉆速計算等(圖7)。

圖6PC端主界面(原始截圖)Fig.6 PC main interface
探測過程的重要數據都保存于數據庫的相關表中,還可按條件進行數據篩選,列表導出所需要的成果數據。成果數據格式為TXT或Excel文檔,以便與測量內業成圖軟件相兼容。圖8是一個礁石探測成果例子。
應用表明,本套軟件功能多樣、操作簡單、運行穩定。經與現場人工釬探和地質鉆探對比,礁石認定準確、及時;與大地測量專業軟件對比,坐標轉換準確;經計量機構校準,位移測量分辨率達0.75 mm,位移測量精度達0.5%,鉆速測量精度達2%,滿足礁石自動探測的需要。
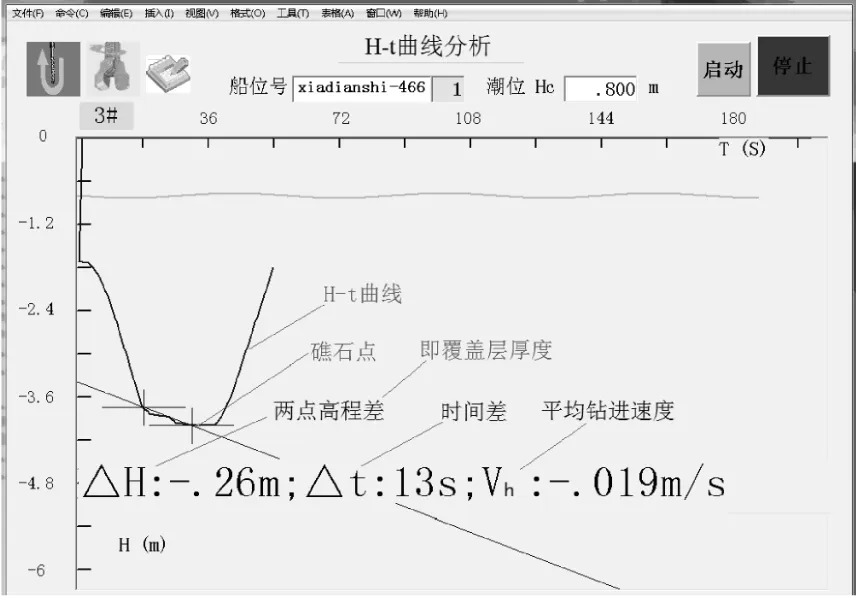
圖7H?t曲線分析(原始截圖)Fig.7 Curve analysis of H?t
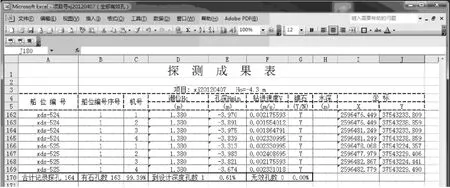
圖8 礁石探測成果導出(原始截圖)Fig.8 Results of reef detection
3 結語
本套基于單片機和PC端的水下礁石自動探測軟件,能自動控制和實時監視多臺探測鉆機的運行,能精確、實時地測定鉆速,并與礁石的特征鉆速進行比較,判別水下礁石的存在,同時采集、測定礁石點的平面坐標和高程,記錄礁石測量的相關數據,很好地演繹了礁石的識別原理。軟件功能多樣,操作簡便、運行穩定,大大提升了作業工效。本套軟件和探測鉆機、GPS配套使用,安裝于帶定位鋼樁的船上,具有體積小、功耗低、鉆進速度快、穿透力強,礁石判定準確、高效等特點,適用于內河、沿海水域帶有覆蓋層的水下礁石的快速探測,具有推廣應用價值。
[1]楊明遠.水下礁石快速探測設備的研制和應用[J].廣東水利水電,2014(5):71-75. YANG M Y.Development and Application of Fast Underwater Reef Detector[J].Guangdong Water Resources and Hydropower,2014(5):71-75.
[2]Kawabata K,Takemura F,Futenma S,et al.On?line image gathering utilizing an operated underwater movable sensor node[J].Jour?nal of Robotics and Mechatronics,2013,25(5):772-777.
[3]Pizarro O,Williams S,Mahon I,et al.Advances in Underwater Surveying and Modelling from Robotic Vehicles on the Great Barri?er Reef[J].EOS Trans.AGU Ocean Sci.Meet.,2006(S):87.
[4]王解先,王軍,陸彩萍.WGS?84與北京54坐標的轉換問題[J].大地測量與地球動力學,2003(8):70-73. WANG J X,WANG J,LU C P.Problem of Coordinate Transformation Between WGS?84 and Beijing 54[J].Journal of Geodesy and Geodynamics,2003(8):70-73.
Development of automatic detection software for underwater reef
WANG Xue?bo1,YANG Ming?yuan2
(1.Guangzhou Waterway Bureau of Guangdong Province,Guangzhou 510275,China;2.Guangdong Province Waterway Bureau,Guangzhou 510115,China)
On account of low efficiency and low accuracy in the current underwater reef detection,the underwa?ter reef detection equipment was developed,and a set of automatic reef detection software was programmed to match the equipments on the basis of the scientific research projects.The study shows that the software is composed of the single chip microcomputer and the PC program.It can automatically control and monitor the operation of drilling rigs.According to the correspondence of drilling speed and rock solidity,automatic determination of underwater reef is realized.Meanwhile,it can carry out automatic collection and record the data of coordinates and elevations of the reef points.Results show that the reef detection software has a variety of functions,and its result is accurate. The equipments have the characteristics of high automation degree.
reef detection;equipment of measurement and control;single chip microcomputer;software devel?opment
TP 311
A
1005-8443(2014)06-0647-06
長江中游戴家洲河段航道整治二期工程順利通過交工驗收
2014-06-09;
2014-08-08
廣東省交通運輸廳科研項目(2009-04-006)
王雪波(1965-),男,工程師,主要從事船舶、機電、計算機技術工作。
Biography:WANG Xue?bo(1965-),male,engineer.
本刊從交通運輸部天津水運工程科學研究院獲悉,2014年11月22日,長江航道工程建設指揮部在黃石主持召開了長江中游戴家洲河段航道整治二期工程交工驗收會議。該工程是由交通運輸部天津水運工程科學研究院和長江航道規劃設計研究院聯合設計的。會議通過現場踏勘、聽取各參建單位匯報和查閱工程建設資料,經施工單位自檢、監理評定、長航質監站核定,工程達到《水運工程質量檢驗標準》,順利通過交工驗收。據介紹,戴家洲河段由巴河水道和戴家洲水道組成,屬于長江中游重點淺水道之一。工程整治目標為:以直水道為通航主汊,在一期工程和戴家洲右緣下段守護工程的基礎上,通過工程措施,使戴家洲河段航道尺度達到4.5 m×200 m×1 050 m,保證率為98%。同時圓水道也保持為可通航汊道。工程主要建設內容包括:在戴家洲河段直水道右岸邊灘中上段建設潛丁壩3條,在戴家洲右緣中上段建設護岸6 118 m,配套建設航道整治工程建筑物示位專用標4座。工程實施以來,4.5 m等深線已貫通,航槽穩定,航寬保證在200 m以上,航道條件得到顯著改善,滿足設計航道尺度,達到了預期整治目標,為明年的竣工驗收奠定了堅實的基礎。(殷缶,梅深)
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設計工程(2015年15期)2015-02-27 12:07:30
電子設計工程(2015年8期)2015-02-27 12:05:36