海底觀測網控制系統設計
2014-07-01 23:28:48李智剛秦寶成李默竹
傳感器與微系統 2014年8期
關鍵詞:系統
孫 凱, 李智剛, 秦寶成, 李默竹
(1.機器人學國家重點實驗室 中國科學院 沈陽自動化研究所,遼寧 沈陽 110016;2.中國科學院 研究生院,北京 100049)
海底觀測網控制系統設計
孫 凱1,2, 李智剛1, 秦寶成1, 李默竹1
(1.機器人學國家重點實驗室 中國科學院 沈陽自動化研究所,遼寧 沈陽 110016;2.中國科學院 研究生院,北京 100049)
海底觀測網通過光電復合纜為運行于海底的各種物理、化學、地質、生物等傳感器提供連續電能和數據帶寬,是近幾年海洋科學研究的新的重要手段。介紹了中國科學院重大科技基礎設施預先研究項目——南海海底觀測示范網控制系統的整體結構、硬件及軟件系統設計。經過水池試驗表明:研究的控制系統能夠實現視頻、控制命令等信息通過光纖以太網的實時雙向傳輸,能夠實現對電能質量指標和絕緣、漏水等安全指標的實時監控,能夠實現故障的智能處理,滿足設計要求。
海底觀測網; 控制系統; 網絡構架; 光交換機
0 引 言
我國是個海洋大國,擁有豐富的海洋資源,大陸海岸線總長度超過1.8×104km,管轄海域近300×104km2。開發海洋是推動我國經濟社會發展的一項戰略任務,我國要加強海洋調查評價和規劃,全面推進海域使用管理,加強海洋環境保護,促進海洋開發和經濟發展[1]。海底觀測網絡的研究與建設是目前國際海洋研究領域研究的熱點[2]。海底觀測網能夠獲取包括海洋物理、化學、地址、生物等觀測數據,這些數據涉及海洋資源與能源、氣候、環境、生態等方面,對于海洋科學研究、海洋環境保護,以及海底資源勘探與開發等都具有十分重要的意義[3]。因此,近年來各國紛紛提出計劃或投入巨資建設本國的大規模纜系海底觀測系統[4~6]。
目前,世界各國海底觀測網的研究已經全面展開。自20世紀90年代以來,美、加、日等海洋技術發達國家紛紛開展了海底觀測網的研究與建設,其中典型代表有:1998年,美國華盛頓大學與伍茲霍爾海洋研究所開展了NEPTUNE計劃,加拿大于1999年6月加入[7]。2003年,日本東京大學主持建設了海底地震觀測網ARENA(advanced real-time earth monitoring network in the area),以提供地震、海洋學和生物學等信息[8]。
監控系統是海底長期觀測系統的核心組成部分,具有最終意義的海洋監測數據是通過監控采集和傳輸到岸站進行顯示和存儲使用的,監控系統還負責監測和保護系統的安全運行。
1 系統結構
海底觀測網監控系統在結構上分為三個層:第一層次為岸站監控子系統,包括監控計算機、監視器、視頻解碼器、網管型光交換機、服務器;第二層次為主接駁盒監控子系統,安裝運行于主接駁盒電子艙內,是海底長期觀測系統的主節點,可以從主接駁盒內再分支出不同的次節點,系統主要包括網管型光交換機、以太網邏輯控制器、電壓變換器、電流傳感器、電壓傳感器、繼電器等主要電子元件,能夠監控每一個次級接駁盒的供電狀態(電壓、電流),并作為次級接駁盒數據傳輸到岸站的中繼;第三層次為次級接駁盒監控子系統,負責為水下攝像機、ADCP、水質儀等設備供電和進行數據傳輸,該層控制系統將PAL制式視頻和串行格式數據如RS—232,RS—422,RS—485均轉換為以太網傳輸格式數據。因此,海底觀測網監控系統的數據傳輸統一為以太網格式,利于擴展和維護。系統結構圖如圖1所示。

圖1 控制系統總體結構Fig 1 Total structure of control system
2 硬件設計
2.1 岸站監控系統
岸站監控系統是海底長期觀測系統的頂層部分,主要設備安裝在岸站監控室內,岸站監控子系統的主要設備如圖2所示。監控計算機實時顯示水下攝像機拍攝到的畫面和系統運行狀態信息。光以太網交換機選用MOXA的EDS—728,該交換機具有1 GB/s的光纖接口,還具有100 MB/s的網線接口,具有較強的網絡管理和通信能力。視頻解碼器和光交換機通過網線連接,視頻解碼器的視頻輸出信號通過BNC視頻線連接視頻顯示器。本系統視頻解碼器選擇MOXA的Dport361。服務器通過網線連接光以太網交換機。監控程序控制視頻數據、海洋觀測設備數據存儲到服務器上。服務器選用惠普DL385機架式刀片服務器。

圖2 岸站監控系統構架Fig 2 Architecture of control system in shore station
2.2 主接駁盒監控系統
主接駁盒監控系統處于岸站監控系統和次接駁盒監控系統之間,是數據傳輸的中繼站。主接駁盒監控系統管理所有次級接駁盒的供電狀況,如電流、電壓等。若某一個次級接駁盒的供電出現故障,主接駁盒的監控系統應能檢測到故障并在必要時切斷該次級接駁盒的供電。主接駁盒監控系統主要元器件包括光以太網交換機、以太網控制器、電源管理系統等。在本系統中,主接駁盒光以太網交換機選用MOXA EDS—G509。該交換機具有1GB/s的數據通信能力,通過光纖和岸站光交換機連接。光以太網交互機通過網線連接以太網控制器。以太網控制器選用WAGO的750—881可編程邏輯控制器,用來采集主接駁盒控制系統的運行狀態和接收岸站監控程序指令。電源管理系統主要設備為電流傳感器、電壓傳感器等、繼電器等,負責采集監控次級接駁盒的供電狀況。主接駁盒實物及監控系統連接關系如圖3所示。
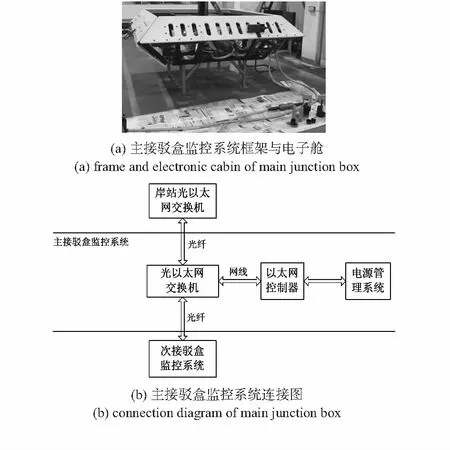
圖3 主接駁盒監控系統Fig 3 Main junction box control system
2.3 次級接駁盒監控系統
次級接駁盒監控系統負責采集海洋觀測設備的數據,并實現對海洋觀測設備的電源管理和數據類型轉換和傳輸服務。從4(a)可看到艙蓋上裝有水下連接器,用來連接海洋觀測設備和主接駁盒電子艙,圖4(b)所示為次接駁盒監控系統電子艙和水下攝像機,次級接駁盒監控系統設備主要包括光以太網交換機、以太網控制器、視頻編碼器、串口/以太網轉換器等。視頻編碼器的作用是將模擬視頻信號轉換為符合以太網傳輸協議的數字信號,海洋觀測設備的數據類型復雜多樣,使用串口/以太網轉換器統一將其轉換為以太網類型數據。經過轉換,觀測網內的數據格式均統一,有利于系統的進一步擴展。

圖4 次級接駁盒框架與電子艙Fig 4 Frame and electronic cabin of secondary junction box
3 軟件設計
海底觀測網軟件系統應滿足實時性強、網絡通信性能好、操作簡潔易懂、界面美觀友好等要求。岸站監控軟件采用C#作為控制程序設計的工具,采用實時性較好的TCP/IP通信模式,保障了通信的實時性和穩定性。主接駁盒和次級接駁盒監控軟件采用嵌入式設計方法,實現與岸站實時通信。
3.1 岸站監控系統軟件
岸基站監控軟件主要實現與水下接駁盒的網絡通信;對接駁盒上傳的數據按照規定的協議解析并進行實時動態顯示;通過人機監控界面能夠直觀地了解到水下各系統運行狀態;通過人機界面開啟、關斷水下海洋觀測設備的供電;實現海底接駁盒的電能分配和控制。程序的數據接收采用異步監聽方式,無需接收數據時掛起主線程,提高了執行效率和穩定性。
3.2 主接駁盒與次級接駁盒監控軟件
主接駁盒和次級接駁盒監控系統內均有以太網邏輯控制器,并根據實際需要加裝了數字量輸出、模擬量輸入、模擬量輸出、溫度采集等不同種類和功能的模塊。邏輯控制器內運行有邏輯控制程序。邏輯控制程序完成的主要功能有:同岸站監控系統實時通信、采集傳感器數據、執行岸站監控軟件發出的控制命令等。圖5為以太網邏輯控制器內控制程序工作流程。

圖5 水下控制節點程序流程圖Fig 5 Program flow chart of underwater control node
4 系統測試與試驗
海底觀測網進行了海水浸泡試驗,控制系統達到了良好的效果。主接駁監控系統、次級接駁盒監控系統能夠對各自系統的運行狀態進行檢測并在岸站監控系統顯示。岸站監控程序顯示了主接駁盒監控系統發送的主接駁盒狀態數據,主要為供電電壓、電流、絕緣、漏水值等信息,如表1。視頻監控顯示是海底觀測網的重要的功能,本控制系統采用視頻編碼器壓縮視頻信號,采用三層交換機系統傳輸視頻信號,在岸站監控計算機內通過軟件解碼并實時顯示視頻。

表1 主接駁盒狀態數據Tab 1 Datas of status of main junction box
5 結 論
本文提出了一種海底觀測網絡控制系統的構架結構,分層次設計思想和網絡通信方法,介紹了實現該控制系統的主要電子元件及連接關系,介紹了控制系統軟件設計的主要思想。經過水池試驗表明:控制系統實現了電能的輸送和檢測,實現了水面監控系統與水下監控系統數據的雙向實時傳輸,實現了安全監控功能要求,滿足了設計要求。
[1] 孫志輝.用科學發展觀引領我國海洋經濟又好又快發展[J].求是,2006(11):56-58.
[2] 汪品先.關于建設海底觀測平臺的建議[J].學會,2005(5):52-53.
[3] Christlan R R,Diglacomo P M,Thomas C M.Opportunities and challenges of establishing coastal observing system[J].Estuaries and Coasts,2006,29(5):871-875.
[4] Isern A R.National Science Foundation's ocean observatory initiative [J].Sea Technology,2005,46 (96 ) :55-60.
[5] Barnes C R,Best M M R,Zielinski A.The NEPTUNE Canada regional cabled ocean observatory[J].Sea Technology,2008,49(7):10-14.
[6] Person R,BeranzoliI L,Berndt C,et al.ESONET:An European sea observatory initiative[C]∥Proc of Oceans’08,IEEE,2008: 1215-1220.
[7] 羅繼業,李 彥.海王星海底長期觀測系統的技術分析[J].海洋技術,2006,25(3):15-18.
[8] 王項南,馬麗珊,熊 焰,等.深海觀測平臺技術[J].海洋技術,2007,26(3):16-18.
Design on control system for ocean observatories
SUN Kai1,2, LI Zhi-gang1, QIN Bao-cheng1, LI Mo-zhu1
(1.State Key Laboratory of Robotics,Shenyang Institute of Automation,Chinese Academy of Sciences,Shenyang 110016,China;2.Graduate School of Chinese Academy of Sciences,Beijing 100049,China)
Ocean observatories provides continuous power and data bandwidth for various kinds of physical,chemical,geological and biological sensors by hybrid power/optical fiber cables,which is new important way for ocean research recently.Present total configuration of the control system and the design of hardware and software system of the significant science and technology infrastructure advance research project“South China Sea Subsea Demonstrated Observatory”.The experimental results prove that the system can meet the requirements of transmitting video signals and datas by optical fibers,monitoring and controlling the security of system such as insulation and leaking.
ocean observatories; control system; network architecture; optical switches
10.13873/J.1000—97877(2014)08—0094—03
2014—01—22
TP 277
A
1000—9787(2014)08—0094—03
孫 凱(1979-),男,吉林省集安人,博士研究生,助理研究員,主要從事海洋裝備相關控制系統算法設計、優化、分析與研究。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
