地理國情要素時空變化檢測技術研究
2014-06-27 05:47:31高小明樊文峰何昭寧
測繪通報 2014年11期
王 懷,高小明,樊文峰,何昭寧
(國家測繪地理信息局衛星測繪應用中心,北京 101300)
地理國情要素時空變化檢測技術研究
王 懷,高小明,樊文峰,何昭寧
(國家測繪地理信息局衛星測繪應用中心,北京 101300)
面向地理國情要素變化提出了一種幾何匹配相似度的變化檢測方法,并將該方法運用到點、線、面三種幾何類型的地理要素變化檢測中。針對變化檢測結果設計了一種版本-差量的時空數據庫模型來存儲地理要素變化檢測結果,以揭示地理要素的時空特征及其變化趨勢。
地理要素;變化檢測;版本-差量
一、引 言
在地理信息系統中,既需要對數據進行實時更新,也要對歷史數據進行分析,對未來變化趨勢作出預測[1]。時空數據的變化檢測[2]就顯得尤為重要,主要包括柵格時空數據變化檢測和矢量時空數據變化檢測。近幾年來,對基于遙感影像的變化檢測技術已經取得可觀的成就,基于矢量時空數據的變化檢測分析逐漸成為國內外許多科研機構和學者研究的重要內容。
從時間角度看,時態地理信息系統[3]中空間信息可分為兩種類型,即動態的和靜態的。現實世界中絕大多數現象本質上都是動態的,靜態信息是描述在較短時間內沒有變化的空間對象的信息,如地質圖、道路、公共設施等,但在長期的一段時間里,這些對象都會發生變化。動態信息是描述在較短時間內發生了變化的空間對象的信息,時間的長度依不同的領域而定。時空變化是地理實體及其屬性在時間軸上的改變過程。對時空變化進行分類,有助于對時空變化分析的理解,對時空數據庫模型[4-5]的建立和時空變化檢測也有一定的幫助。分類原則的不同,時空變化描述的重點將會有很大的差異。根據研究領域的不同,時空對象的變化可概括為:要素隨時間的幾何變化、要素隨時間的位置變化、要素屬性隨時間的變化。
地理國情[6]監測是近年來國家提出的重要戰略規劃,地理國情是重要的基本國情,是國土疆域面積、地理區域劃分、地形地貌特征、道路交通網絡、江河湖海分布、土地利用與土地覆蓋、城市布局和城鎮化擴張、生產力空間布局等自然和人文地理要素的宏觀性、整體性、綜合性體現。地理國情要素的變化檢測研究主要集中于地理實體匹配、圖像配準、地圖合并技術及其相關變化分析應用領域。本文主要研究矢量地理要素實體[7]變化檢測技術實現以及變化結果的增量模式存儲。
二、地理要素變化檢測方法
地理要素數據變化檢測首先是確定變化檢測數據的候選集。如何在候選集中快速找出待匹配候選集[8],對空間數據變化檢測效率有重要影響。而匹配候選集的確定需要通過空間搜索來實現,空間搜索一般包含按空間位置的搜索、空間關系的搜索等。空間搜索一般借助于空間索引機制在空間數據庫中搜索符合查詢條件的空間實體,常用的空間搜索方式有基于空間索引機制的搜索、基于空間拓撲關系的搜索[9]。
矢量地理要素的變化檢測主要體現在點要素、線要素以及面要素的變化檢測方面。而變化檢測主要體現在地理要素的幾何匹配,從空間形狀的角度出發,對地理要素的幾何形狀作定量和定性的分析,比較其間的相似程度來找同名實體[10]。本文中點要素匹配采用歐氏距離匹配,線要素匹配采用Hausdorff距離[11]匹配,面要素匹配采用Hausdorff距離、質心點距離、面積重疊度等3個特征匹配。
1)點要素匹配采用歐氏距離

在點要素的匹配中是常用的匹配方法,計算點與點之間的歐氏距離便可實現點要素的匹配過程。
點要素匹配中歐氏距離以參考點要素實體為圓心,以匹配閾值為半徑做緩沖區,遍歷候選集中所有待匹配目標實體。
2)線要素的匹配采用Hausdorff距離,是對兩組點集相似程度的一種量度,是對兩組點集之間距離進行定義的一種形式,一般適用于線與線、面與面要素之間距離相似度的計算。假設有兩組點集A、B,其中A={a1,a2,…,an},B={b1,b2,…,bm},則A到B的Hausdorff距離與B到A的Hausdorff距離定義為
其中,d( a,b)為A、B兩點集之間的距離;A、B之間的Hausdorff距離定義為h(A,B)、h(B,A)中的最大值

Hausdorff距離表達式可以將其理解為最大最小距離,對于任意兩條線L1、L2,L1到L2的hausdorff距離為d1,L2到L1的hausdorff距離為d2,d1、d2分別是圓心在L1、L2上滾動圓的最大半徑。
3)由于面要素的空間復雜程度較高,在面要素匹配過程中,依靠單一的幾何特征進行匹配往往難以準確做出判斷。基于面要素的空間復雜性,本文通過計算特征相似度來比較兩面要素空間實體之間的各種差異,并對各相似度加權平均來獲得總相似度值,面要素匹配主要考慮Hausdorff距離、質心點距離、面積重疊度等幾個方面的因素。
對于參考要素A在候選集B中,共有n個要素比較,A、B總相似度為sim(A,B),其中:si為相似特征;ωi為權重。
①Hausdorff距離
設面要素A、B之間Hausdorff距離為H( A,B),則A、B的Hausdorff距離相似度為
其中,rA、rB分別為面要素A、B最小外接矩形(MBR)對角線長的一半,由于不規則多邊形的半徑難以確定,因此引入rA+rB來反映多邊形的尺寸,由于rA+rB是基于圖形本身的相對值,不受位置與尺寸的影響,用作相似度值計算常量具有一定的合理性。
②質心距離
設面要素A、B質心之間距離為Dist(A,B),則A、B質心距離相似度為
③重疊度
設面要素A、B的面積分別為SA、SB,二者重疊相交面積為SA∩B,則A、B重疊相似度為
三、版本-差量時空數據模型
基于“版本-差量[12]”式時空數據模型的時空數據變化檢測結果是增量式存儲,本文采用建立現勢庫、過程庫等邏輯庫來存儲動態數據。現勢庫存儲現勢數據,在時空數據庫系統中將作為整個數據集的基態;過程庫跟蹤地理要素演變的各個階段,描述地理要素演變的全過程,記錄地理實體的親緣關系,能很好地支持地理要素的時空回溯,對于任意給定的時刻或時間段,都可從過程庫中查詢出地理要素歷史的狀態,恢復當時對象的時空關系。
采用“版本-差量”時空數據庫模型的實現技術,將動態數據以增量存儲方式進行存儲,時空數據存儲在于解決時間序列的空間數據存儲,由于空間數據在時間序列的演變過程中,大量空間要素信息變化較少或沒有變化,采用差量式時空數據存儲方案,只存儲發生變化的時空數據,未發生變化或未發現變化的時空數據不存儲。本文設計表1—表5來實現“版本-差量”數據模型存儲。
其中,表1、表2是維護數據版本數據庫結構表;表3是地理要素基態表;表4是地理要素消失的記錄表;表5是地理要素發生變化時,前一時態和后一時態的關系記錄表。
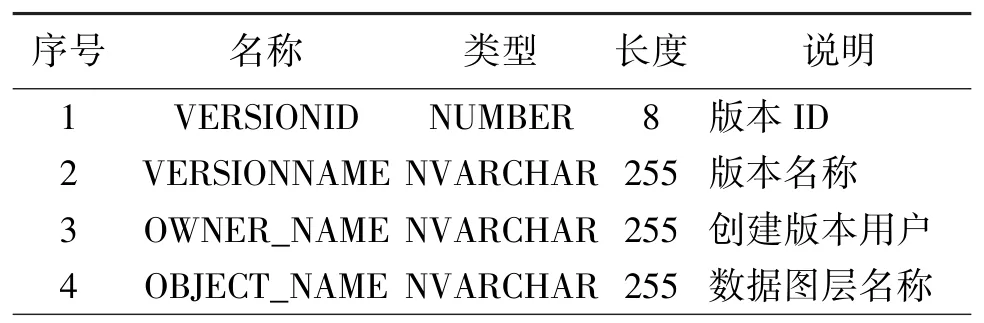
表1 數據版本
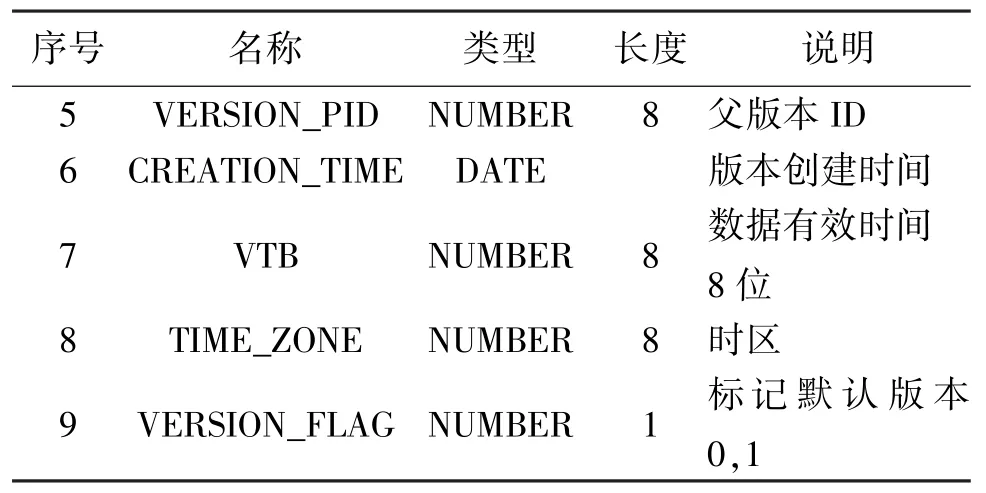
序號名稱類型長度說明5VERSION_PIDNUMBER8父版本ID 6CREATION_TIMEDATE版本創建時間7VTBNUMBER8數據有效時間8位8TIME_ZONENUMBER8時區9VERSION_FLAGNUMBER1標記默認版本0,1
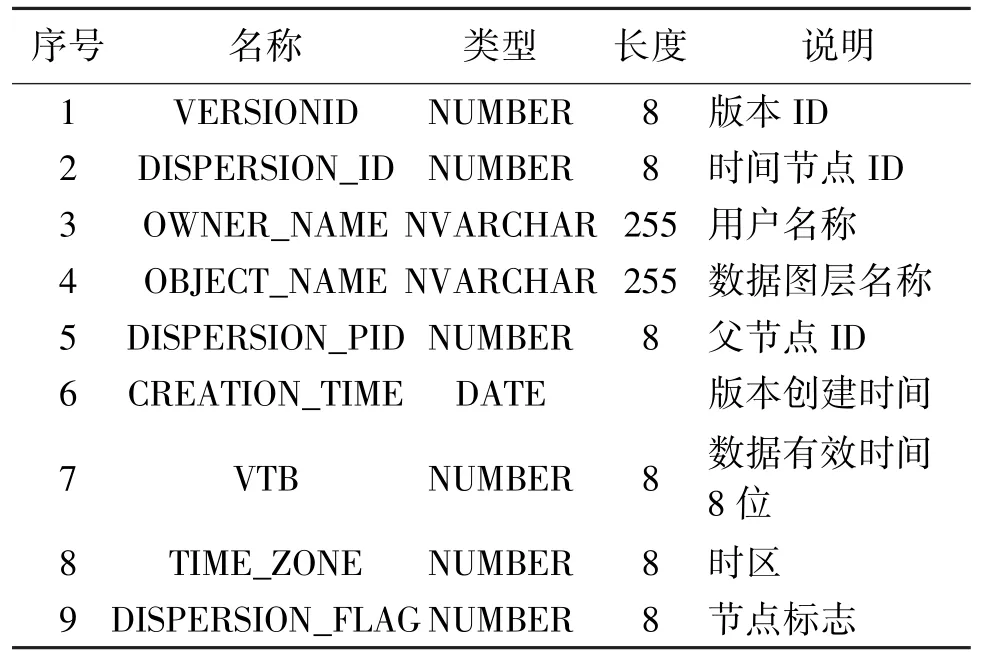
表2 版本時間節點
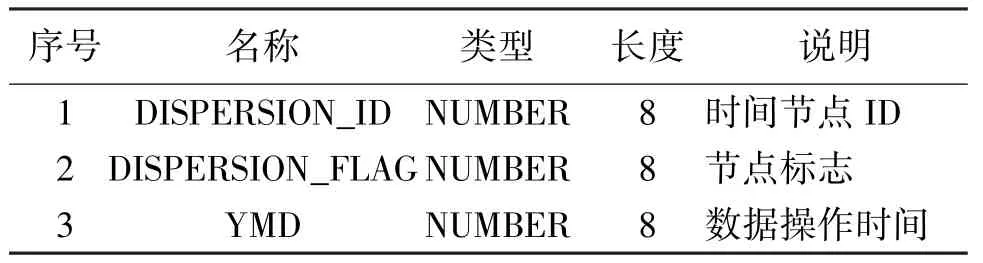
表3 數據基態表
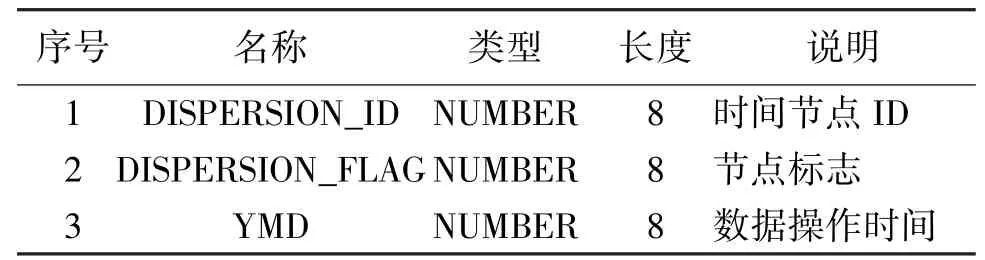
表4 數據基態D表
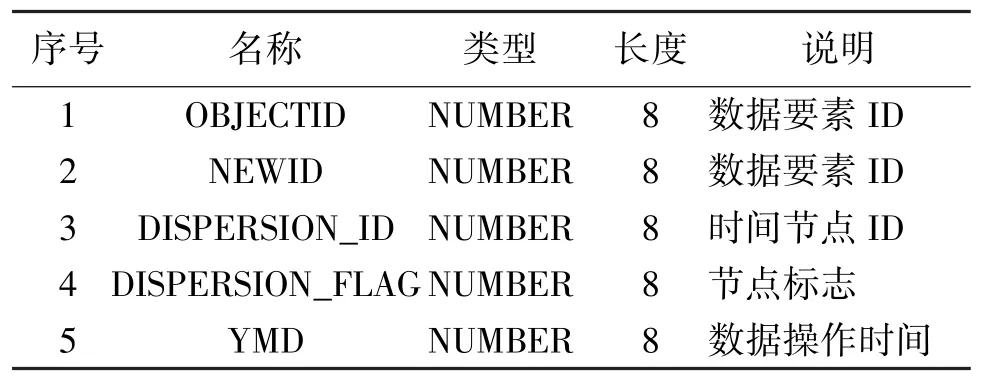
表5 數據基態R表
四、地理要素變化檢測流程
本文針對上述點、線、面要素的幾何變化檢測研究,設計了以下變化檢測流程如圖1所示。
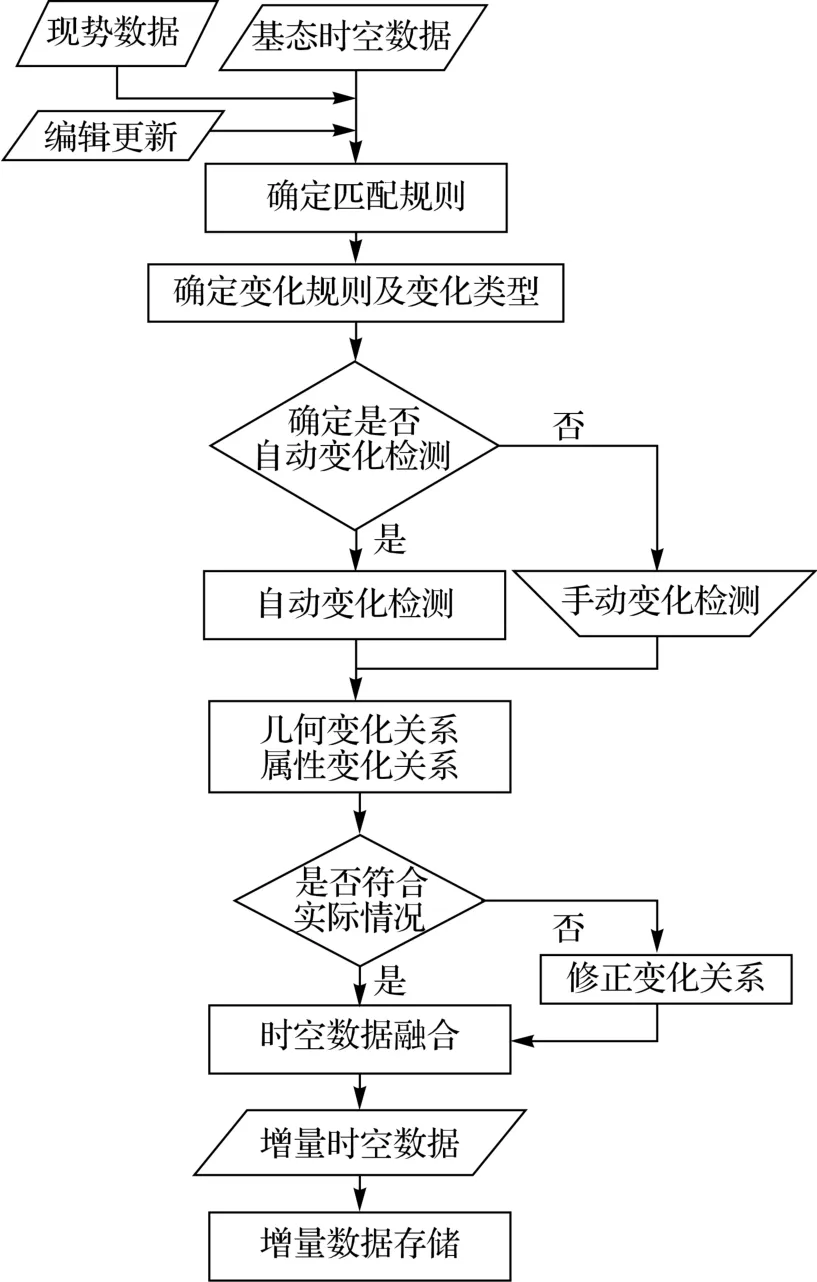
圖1 地理要素變化檢測流程
1.數據預處理
由于數據獲取來源的不同,使得同一地區的數據在數據存儲格式、坐標系統及投影系統、數據精度等方面存在差異。因此,在進行地理要素變化檢測之前要進行數據預處理,形成變化檢測前的基態時空數據。其他待變化檢測時態的數據的數據格式、坐標系統、數據進度統一到基態數據上。
2.數據變化檢測
根據上面闡述的檢測算法,進行地理要素變化檢測。
點要素變化檢測,以參考點要素實體為圓心,以匹配閾值為半徑做緩沖區,遍歷所有待匹配目標實體,點要素匹配過程中距離閾值的設置應根據實際數據而定,若設置范圍太大,可能出現一點對較多點的匹配;若設置范圍太小,可能找不到同名點。一般地匹配閾值設定有兩種方式[13]:
1)在地圖點位精度已知的情況下,匹配閾值可設為精度的若干倍數,設兩圖幅精度分別為p1、p2,按誤差傳播定律兩同名點的距離精度此時兩圖幅的匹配閾值可設為p的倍數,如2倍的p等。
2)在地圖點位精度未知情況下,匹配閾值由人工統計方式確定。具體方法是在兩圖幅上人工尋找同名點,統計若干同名點的距離差異,依據統計值給出一個匹配閾值(如平均值、中值等)。
線要素變化檢測主要是兩種方法:一是用Hausdorff距離來比較兩線要素的總體差異;二是用節點到曲線的距離來計算線要素的細節差異,然后對二者差異取加權平均值。變化檢測步驟如下:
1)對新時態數據集A中線要素依據其MBR建立R樹索引RA。
2)遍歷舊時態數據集B中每個線要素b,在RA中查找與b的MBR相交的所有線要素作為b的匹配候選集A′。
3)若A′中沒有元素,轉第2)步。
4)遍歷A′中元素a′,對b與a′分別作Hausdorff距離匹配和改進的結點距離相似度計算,根據給定的權值對兩種匹配結果加權求和得總相似度值Sim(b,a′)。若A′中元素全部遍歷,轉第2)步。
5)若Sim(b,a′)大于等于給定的閾值ε,設b、a′的長度分別為len(b)、len(a′),
若len(b)>len(a′),記錄b與a′變化關系為縮小;
若len(b)<len(a′),記錄b與a′變化關系為擴大;
若len(b)=len(a′),記錄b與a′變化關系為無變化。
6)若Sim(b,a′)小于給定的閾值ε,轉到第4)步。
7)重復步驟2)—6),得到A、B兩要素集變化關系,算法結束。
面要素變化檢測采用上述Hausdorff距離、質心點距離、面積重疊度等3個方面的因素,其變化檢測步驟如下:
1)對新時態數據集A中線要素依據其MBR建立R樹索引RA。
2)遍歷舊時態數據集B中每個線要素b,在RA中查找與b的MBR相交的所有面要素作為b的匹配候選集A′。
3)若A′中沒有元素,轉第2)步。
4)遍歷A′中元素a′,對b與a′按第1)步計算總相似度Sim(b,a′),根據給定的權值對兩種匹配結果加權求和得總相似度值Sim。若A′中元素全部遍歷,轉到第2)步。
5)若Sim(b,a′)大于等于給定的閾值ε,且S3=1,設b、a′的面積分別為Area(b)、Area(a′),
若Area(b)>Area(a′),記錄b與a′變化關系為縮小;
若Area(b)<Area(a′),記錄b與a′變化關系為擴大;
若Area(b)=Area(a′),記錄b與a′變化關系為無變化。
6)若Sim(b,a′)小于給定的閾值ε,轉到第4)步。
7)重復步驟2)—6),得到面要素變化關系。
3.變化檢測的結果存儲
設計基于“版本-差量”式時空數據模型的增量數據存儲,把變化檢測的結果存儲到數據庫中,與基態數據形成時空數據庫。
五、結束語
地理要素時空數據變化檢測技術對所有與地理信息有關的領域有廣泛的應用前景,特別是對經常性變化的空間信息的管理具有重要的意義。在地理國情方面,通過對地理國情要素的變化檢測的結果統計和對比分析,揭示監測對象的變化演進規律,并對監測對象未來的發展演化方向進行分析,預測所形成的趨勢信息,如城市化、草地退化、沙漠化及其他重要地理要素變化趨勢等信息。在基礎地理信息數據管理方面,時空數據變化檢測技術在基礎地理信息管理中也有著很大的應用前景。各級測繪部門在更新過程中,可以基于基態版本的數據之上,利用現勢數據對其進行變化檢測,形成增量式的基礎地理數據,構建基礎地理信息數據的多時態數據。采用時空數據增量存儲模式,使得歷史數據與現勢數據融合在一起,充分發揮歷史數據的作用,從而更加便于對地理信息進行地理變遷、地理現象變化規律等的分析研究。
[1] 劉剛,周炳俊,安銘剛,等.時態GIS理論及其數據模型初探[J].北京測繪,2008(4):16-20.
[2] 張振龍,曾志遠,李碩,等.遙感變化檢測方法研究綜述[J].遙感信息,2006(5):64-66.
[3] 汪匯兵,唐新明,史紹雨,等.一種基于時態樹結構的時空數據的動態可視化方法[J].測繪科學,2009,34(1):110-112.
[4] 唐新明,吳嵐.時空數據庫模型和時間地理信息系統框架[J].遙感信息,1999(1):4-8.
[5] 田嬌嬌,唐新明,楊平,等.動態數據庫模型的研究與應用[J].測繪科學,2006,31(1):123-124.
[6] 陳俊勇.地理國情監測的學習札記[J].測繪學報,2012,41(5):633-635.
[7] 陳愛軍,李琦,徐光祐.地理空間信息共享理論基礎及其解決方案[J].清華大學學報:自然科學版,2002,42(10):1405-1409.
[8] 翟仁健.基于全局一致性評價的多尺度矢量空間數據匹配方法研究[D].鄭州:解放軍信息工程大學,2011.
[9] 徐文祥.基于空間特征碼的矢量要素變化檢測研究[D].南京:南京師范大學,2011.
[10] 郭黎,崔鐵軍,王豪,等.基于面狀要素拓撲關系的數據匹配技術研究[J].測繪科學,2010(1):130-132.
[11] 王文成,李曉偉,智佳,等.基于Hausdorff距離的輪廓線匹配[J].西安郵電學院學報,2007,12(3):91-94.
[12] 汪匯兵,唐新明,洪志剛.版本差量式時空數據模型研究[J].測繪科學,2006,31(5):131-133.
[13] 郭黎.多源地理空間矢量數據融合理論與方法研究[J].鄭州:解放軍信息工程大學,2008.
Study on the Geographical Situation Elements Spatio-temporal Change Detection Technique
WANG Huai,GAO Xiaoming,FAN Wenfeng,HE Zhaoning
P208
B
0494-0911(2014)11-0084-04
2014-06-11
江蘇省測繪科研項目(JSCHKY201313)
王 懷(1975—),男,四川溫江人,碩士,助理研究員,現主要從事地理信息系統數據的時空建庫、影像數據建庫、三維GIS虛擬仿真方面的應用研究工作。
王懷,高小明,樊文峰,等.地理國情要素時空變化檢測技術研究[J].測繪通報,2014(11):84-87.
10.13474/j.cnki.11-2246.2014. 0370