應用時間序列算法的時柵預測卡設計
2014-06-27 05:46:32朱革黃興陳自然
重慶理工大學學報(自然科學) 2014年5期
朱革,黃興,陳自然
(重慶理工大學電子信息與自動化學院,重慶 400054)
應用時間序列算法的時柵預測卡設計
朱革,黃興,陳自然
(重慶理工大學電子信息與自動化學院,重慶 400054)
時柵預測卡通過ARM(LPC213)和FPGA(CycloneII)讀取一系列時柵傳感器測得轉臺角位移,以此建立時間序列AR模型來預測下一時刻轉臺的位移增量,并將預測值以PWM方式輸出,進而使時柵傳感器能作為全閉環數控系統位置檢測單元。試驗結果表明:時柵預測卡的預測精度在±1″內,能較好地解決時柵輸出信號與全閉環數控系統不兼容的問題。
預測卡;時柵傳感器;時間序列;ARM;FPGA
數控系統普遍采用光柵等增量式位移傳感器作為位置檢測裝置,因而數控系統要求的信號按空間均分且為增量式連續脈沖信號[1]。而目前的時柵都為絕對式等時采樣信號。用時柵代替光柵作為數控系統的位置檢測單元,需將時柵的絕對式等時采樣信號轉化為按空間均分的增量式連續脈沖信號。
本文介紹了基于時間序列AR模型算法的時柵預測卡的設計,該卡可以將時柵傳感器的絕對式位移輸出轉換為連續增量式位移信號,從而使時柵位移傳感器能作為全閉環數控系統的位置檢測單元,最終實現全閉環位置控制。
1 預測
1.1 預測的作用
采用預測的方式可以很好地解決時柵作為閉環位置檢測傳感器輸出信號與數控系統不兼容的問題。解決方法是通過預測知道下一個時刻的角度增加值,在時柵測得下一個角度值前將預測的角度增加值以PWM方式輸出脈沖[2]。這樣就實現了將時柵傳感器的絕對式位移輸出轉換為連續增量式位移輸出的目的。
1.2 預測的數學原理
根據時柵的原理,時柵每隔周期T采樣得到轉臺當前的絕對位置θ,按采樣時間的先后順序排列,可得到一組反映轉臺動態過程的離散采樣時間和對應采樣位移的數據。此數據可視為時間序列。時間序列模型是利用時間序列中的相關信息建立的,它是序列動態性和發展變化規律的描述。因此時間序列模型可以對時間序列的未來測量值進行預測。理論和實驗證明時柵位移的二階差分值符合時間序列AR(4)模型[2],預測公式為

其中:φi(i=1,2,3,4)為模型參數;Δ2θi(i=10,9,8,7)為時柵位移過去的二階差分值。
2 時柵預測卡設計
2.1 預測卡系統工作流程
時柵傳感器在每個測量周期檢測到絕對角位移θk后,通過時柵傳感器中DSP的數據總線輸出。當角度值出現在數據總線時,DSP的控制端STRB,PAGE3和A0端輸出一個正脈沖[3]。預測卡利用DSP控制端輸出脈沖的上升沿將時柵輸出的角度值鎖存到鎖存器的數據輸出端,并在其脈沖的下降沿觸發ARM(LPC213)的中斷。ARM (LPC213)在中斷程序中,通過位操作指令控制P1.17和P1.16,從三態緩沖器讀入32位的角位移θk。ARM(LPC213)完成預測計算后,從ARM的PWM1與PWM2端輸出預測位移增量脈沖。PWM1與PWM2端輸出的脈沖送入差分驅動器MAX3030。
2.2 預測卡總體系統設計
預測卡由外圍電路和數字信號處理器兩部分組成。它們的工作關系如下:外圍部分負責將時柵傳感器輸出的絕對式位移信號讀入并發送給數字信號處理器,數字信號處理器在完成預測后,將預測的位移增量值以PWM方式寫入外圍電路部分,外圍電路部分將它們轉化成符合大多數數控系統要求的格式為5 V的方波差分TTL信號脈沖[4]輸出。上述過程如圖1所示。
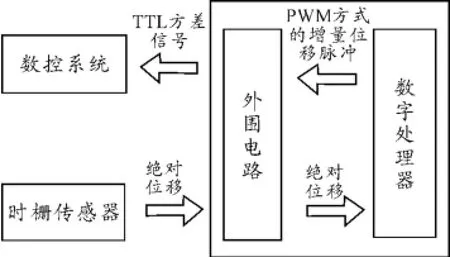
圖1 預測卡信號流程
2.3 外圍電路設計
外圍電路由Cyclone II和差分驅動器組成。Cyclone II完成時柵角度位移鎖存、觸發ARM中斷、辨向并產生零脈沖信號。差分驅動器輸出符合數控系統所要求的連續位移增量信號。
2.3.1 輸入端(Cyclone II)的設計
Cyclone II由U26,U27,U23,U24,U21,U22組成。U21為帶預置功能的可逆計數器;U22為辨向電路;U23為鎖存器;U24,U25為三態總線緩沖器;U26,U27為邏輯門。
時柵傳感器中的DSP的STRB端和PAGE3端通過或門U26接入或非門U27的一個輸入端。DSP的端口A0接入非門U27另一個輸入端。非門U27的輸出分別連接ARM的中斷觸發端ENT3和鎖存器U23的鎖存端。DSP的數據端D0-D31與鎖存器U23的數據輸入端相連。鎖存器U23的輸出線分別接入高低16位的三態緩沖器U24,
U25的輸入端。三態緩沖器U24,U25的輸出端與ARM的P0.17-P0.2端相聯。ARM的P1.17和P1.16端分別聯接三態總線緩沖器U24,U25的使能端。上述設計如圖2所示。

圖2 Cyclone II設計原理
以上電路設計的目的是使時柵傳感器輸出數據時,能觸發ARM芯片的中斷完成數據采集。ARM芯片的PWM1與PWM2接入辨向電路U22,辨向電路U22的正負方向脈沖輸出端分別接入可逆計數器U21增減計數的輸入端。當可逆計數器U21計數的脈沖數與預置的初始值相等時,U21所計的脈沖個數清零,并同時從R端發出一個零位信號,其目的是產生零脈沖信號。
2.3.2 輸出端(MAX3030)設計
差分驅動器的作用是將ARM芯片的PWM1與PWM2端的輸出脈沖轉變為符合大多數數控系統要求的方波差分TTL信號脈沖。差分驅動器的輸入端分別接入ARM數字處理器芯片的PWM1端與PWM2端的輸出,可逆計數器U21的復位脈沖R接入差分驅動器另外的一個輸入端,則差分驅動器分別輸出A相信號、A相取反信號、B相信號、B相取反信號、零脈沖信號、零脈沖取反信號。
2.4 數字信號處理器設計
ARM(LPC213)處理器是PHILIPS公司推出的基于ARM7內核的高性能芯片,內置了脈寬調制器[5],預測卡把它用作數字信號處理器。圖3為ARM數字信號處理器與外圍電路的電氣連接圖。
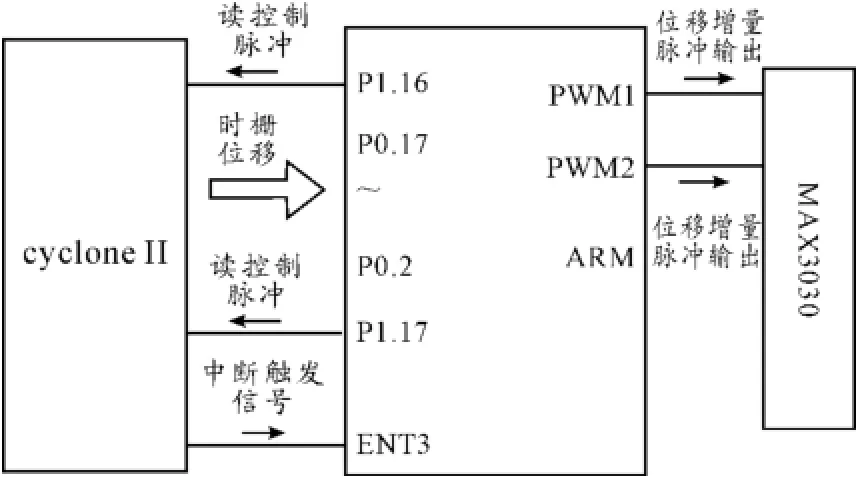
圖3 ARM與外圍電路接線
3 預測卡軟件設計
芯片ARM(LPC213)完成采集絕對位移角度值、模型參數計算、預測角度增量值計算和PWM脈沖輸出的功能。預測卡無操作系統,采用前后臺系統完成。
3.1 主程序設計
主程序首先初始化ARM(LPC213)中斷、PWM控制器等。在等待中斷到來時,給模型參數預置數。當采樣完成10個角度位移信號時,采用Yule-Walker算法求解模型[2]。求解完模型后給模型參數置新值并計算預測均方誤差值。如果超差則利用自適應模型算法遞推修正參數[6-7]。主程序流程如圖4所示。
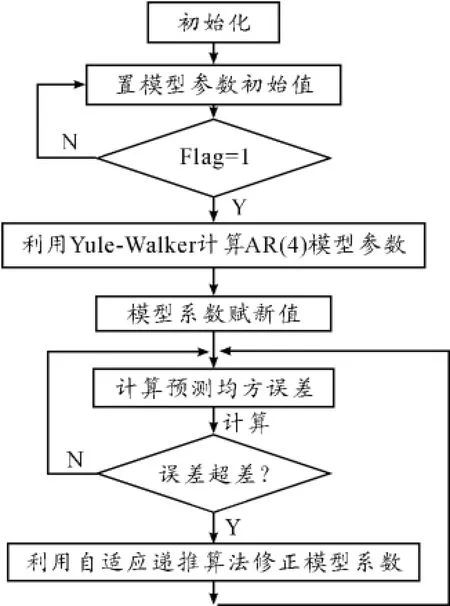
圖4 主程序流程
3.2 中斷程序設計
中斷程序在中斷到來時完成時柵位移采樣,判斷采樣數據的數量是否達到規定的個數,計算1階和2階差值并代入模型計算得到轉臺位移增量預測值,再以PWM方式輸出角度增量脈沖信號,更新前面的計算得到1階和2階差分值。中斷程序流程如圖5所示。

圖5 中斷程序流程
圖5中的Δθi為位移1階差分,Δ2θi為2階位移差分,Q為單位脈沖代表的位移增量。
4 試驗
按上述設計裝備完成的預測卡如圖6所示。將預測卡安裝在時柵轉臺試驗裝置上,輸入端連接時柵傳感器輸出端,同時將轉臺的光柵檢測信號與預測卡輸出的信號同時接入同步采樣電路并發送給上位機以用于誤差檢測。
圖6 預測卡實物圖
轉臺從角度6°轉到25°,上位機在每個采樣周期同時得到光柵和預測卡輸出的角度值,相減計算誤差[8]。重復試驗,結果如圖7所示。

圖7 預測誤差
從圖7可知:預測卡輸出角度誤差控制在±1″內。
5 結束語
預測卡通過時間序列AR模型預測時柵下一個時刻將測得的轉臺角度值與上一次測得的轉臺角度值的增加值,并將增加的角位移以增量脈沖的形式輸出。試驗結果表明:預測卡能很好地完成預測任務,從而較好地解決了時柵輸出信號與數控系統不兼容的問題。
[1]陳自然,彭東林,劉小康,等.基于時間序列的時柵數控轉臺動態建模研究[J].中國工程機械,2011(22): 2853-2857.
[2]劉小康,鄭方燕,王先全,等.時柵數控轉臺空間回轉位置預測方法研究[J].儀器儀表學報,2011,32(10): 2303-2308.
[3]劉小康,費業泰,彭東林,等.時柵位移傳感器智能化實現方法研究[J].儀器儀表學報,2008,29(6):1139-1142.
[4]潘月斗,許鎮琳,楊堂勇,等.一種基于CAN總線的機床數控系統結構設計研究[J].中國工程機械,2007 (2):178-182.
[5]馬忠梅,徐英慧.ARM嵌入式處理器結構與應用基礎[M].北京:北京航空航天大學出版社,2007.
[6]陳自然.基于預測理論的精密角位移動態測量及其試驗研究[D].合肥:合肥工業大學,2012.
[7]EDA先鋒工作室,吳繼華,等.Altera FPGA設計[M].北京:人民郵電出版社,2010.
[8]陳自然.基于絕對式位移傳感器的傳遞誤差檢測系統設計與開發[D].重慶:重慶理工大學.
(責任編輯 楊黎麗)
Design of Forecasting Embedded System Based on Time Series
ZHU Ge,HUANG Xing,CHEN Zi-ran
(School of Electronic Information and Automation,
Chongqing University of Technology,Chongqing 400054,China)
Forecasting embedded system uses ARM(LPC213)and FPGA(CycloneII)to get the displacement of rotary table.The model AR of time series by the displacement is built to forecast increasmental displacement and output the increasmental displacement by PWM.Time grating sensor can work as displacement sensor of digital control system by forecasting embedded system transferring the signal of time grating sensor.The Experiments show that the precision of forecasting embedded system can reach±1 angle of second.Forecasting embedded system can solve the problem of incompatible.
forecasting embedded system;time grating sensor;time series;ARM;FPGA
TP23
A
1674-8425(2014)05-0103-04
10.3969/j.issn.1674-8425(z).2014.05.020
2013-01-09
國家自然科學基金項目( 51175534;51305478);重慶市基礎與前沿研究計劃項目(cstc2013jcyja70007);重慶市教委科學技術研究項目(KJ130801)
朱革(1970—),男,四川宣漢人,博士,教授,主要從事現代傳感技術研究;通訊作者黃興(1982—),男,重慶人,碩士研究生,主要從事嵌入式系統與智能儀表研究。
朱革,黃興,陳自然.應用時間序列算法的時柵預測卡設計[J].重慶理工大學學報:自然科學版,2014(5): 103-106.
format:ZHU Ge,HUANG Xing,CHEN Zi-ran.Design of Forecasting Embedded System Based on Time Series[J].Journal of Chongqing University of Technology:Natural Science,2014(5):103-106.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
光學精密工程(2016年6期)2016-11-07 09:07:19
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
核科學與工程(2015年4期)2015-09-26 11:59:03
