高頻射流實驗裝置中無刷直流電機控制
2014-06-27 05:46:32唐昆鵬申躍詹捷
重慶理工大學學報(自然科學) 2014年5期
唐昆鵬,申躍,詹捷
(汽車零部件先進制造技術(shù)教育部重點實驗室,重慶 400054)
高頻射流實驗裝置中無刷直流電機控制
唐昆鵬,申躍,詹捷
(汽車零部件先進制造技術(shù)教育部重點實驗室,重慶 400054)
以高頻射流實驗裝置控制系統(tǒng)研究為基礎(chǔ),運用Matlab/Simulink對無刷直流電動機控制系統(tǒng)進行建模并仿真。針對常規(guī)PID控制器存在的缺陷設(shè)計了模糊自適應(yīng)PID控制器,使控制系統(tǒng)達到理想狀態(tài),滿足無刷直流電動機廣泛應(yīng)用的要求。仿真結(jié)果表明:該模糊自適應(yīng)PID控制器能使無刷直流電動機的系統(tǒng)響應(yīng)時間更短,且系統(tǒng)無振蕩性、無超調(diào)量、運行穩(wěn)定、可靠性更好。
無刷直流電動機;PID;模糊控制;振蕩性;超調(diào)量
在絕大多數(shù)國家,90%的工業(yè)能源來自燃燒。氣體燃料作為非可再生能源的一部分,與空氣混合通過射流噴射燃燒,能夠燃燒得更充分、更徹底,實現(xiàn)提高燃燒效率、節(jié)約能源的目標。基于此,筆者所在課題組開發(fā)了高頻射流燃燒實驗裝置,并設(shè)計了一整套控制系統(tǒng)。電動機的恒定轉(zhuǎn)速和系統(tǒng)快速響應(yīng)是保證微射流充分燃燒的關(guān)鍵。
在研究控制系統(tǒng)的過程中發(fā)現(xiàn),電動機在運行過程中,由于繞組的自感、互感、阻尼系數(shù)、轉(zhuǎn)動慣量等都隨著負載情況的變化而變化,雙閉環(huán)PID控制的參數(shù)不能隨著被控對象的變化而做相應(yīng)的調(diào)整,因此PID控制器不能提供良好的性能[1-2]。對于被控對象無論是線性還是非線性,模糊控制器都能執(zhí)行有效的控制,具有很好的魯棒性和適應(yīng)性[3]。
本文針對常規(guī)雙閉環(huán)PID控制所產(chǎn)生的系統(tǒng)響應(yīng)時間慢、振蕩性大、超調(diào)量大等缺點,提出了模糊自適應(yīng)PID控制器的方法;運用軟件Matlab/ Simulink建立無刷直流電動機的轉(zhuǎn)速控制系統(tǒng)模型,并進行了仿真。
1 實驗裝置及工作原理
實驗裝置的簡單示意圖見圖1。圖1(b)是圖1(a)中虛線處的放大圖,圖1(c)是圖1(b)的剖面圖。當氣體燃料進入噴射嘴時,電動機驅(qū)動轉(zhuǎn)閥旋轉(zhuǎn)使空氣從小孔注入,兩者混合后形成脈沖從噴嘴射出。
圖1 實驗裝置示意圖
從工作原理分析,電動機恒定的轉(zhuǎn)速是保證脈沖頻率一定的關(guān)鍵要素,因此有必要對無刷直流電動機控制方法與規(guī)律進行研究和探索。
2 無刷直流電動機PID控制系統(tǒng)
2.1 無刷直流電動機數(shù)學模型
無刷直流電動機的轉(zhuǎn)子是由永磁材料制成,具有一定磁極對數(shù)的永磁體。定子是電樞繞組,三相定子相差120°相位[3]。無刷直流電動機以兩相導通三相六狀態(tài)工作方式為例。為方便建立無刷直流電動機的數(shù)學模型[4],本文做如下假設(shè):
1)三相繞組完全對稱,氣隙磁感應(yīng)強度在空間呈方波分布;
2)忽略定子齒槽、換相過程、電樞反應(yīng)等的影響;
3)定子電流、轉(zhuǎn)子磁場分布對稱,電樞繞組在定子內(nèi)表面分布均勻;
4)不計渦流和磁滯的損耗。
由以上假設(shè),根據(jù)電動機的內(nèi)部結(jié)構(gòu)特性及電磁學的基本原理,可建立電壓平衡方程、轉(zhuǎn)矩方程、運動方程[5]。
三相繞組電壓平衡方程為
式(1)中:ua,ub,uc為三相繞組定子電壓;ia,ib,ic為三相繞組定子電流;ea,eb,ec為三相反電動勢;R為每相繞組的電阻;L為每相繞組的電感;M為每相繞組間的互感。
在電動機的結(jié)構(gòu)中,三相繞組是星形連接且沒有中線,則

將式(2)代入式(1)得到
無刷直流電動機的電磁轉(zhuǎn)矩是由定子繞組中的電流與轉(zhuǎn)子磁鋼產(chǎn)生的磁場相互作用產(chǎn)生的。定子電磁繞組的電磁轉(zhuǎn)矩表示為


其中:TL為負載轉(zhuǎn)矩;B為粘滯阻尼系數(shù);J為轉(zhuǎn)子與負載的轉(zhuǎn)動慣量。
2.2 常規(guī)PID控制系統(tǒng)的仿真
PID控制是最早發(fā)展起來的線性控制策略之一,目前仍是工業(yè)控制中最常用的一類控制算法[6]。常規(guī)的PID控制在一定的系統(tǒng)中進行,在一定的區(qū)間范圍內(nèi)能保持良好的控制性能。在常規(guī)PID控制器中,其數(shù)學模型為

其中:Te為電磁轉(zhuǎn)矩;w為定子機械角速度。無刷直流電動機的運動方程可表示為
式(6)中:Kp為比例常數(shù);KI為積分時間常數(shù);KD為微分時間常數(shù)。
將無刷直流電動機的數(shù)學模型結(jié)合常規(guī)PID控制的數(shù)學模型,在Matlab/Simulink模塊中建立無刷直流電動機的整體轉(zhuǎn)速控制系統(tǒng)模型,如圖2所示。
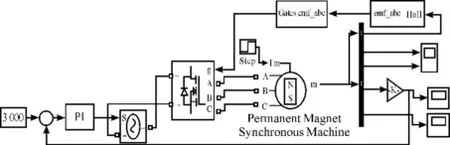
圖2 無刷直流電動機轉(zhuǎn)速控制系統(tǒng)模型
采用邏輯數(shù)字關(guān)系產(chǎn)生脈沖控制逆變器開關(guān)切斷閉合狀態(tài)對電動機的三相輸送電壓,其邏輯關(guān)系如圖3所示。
本文設(shè)定無刷直流電動機的額定轉(zhuǎn)速為3 000 r/min。仿真得到電動機轉(zhuǎn)速波形(見圖4)和電動機A相的感應(yīng)電動勢電壓(見圖5)。
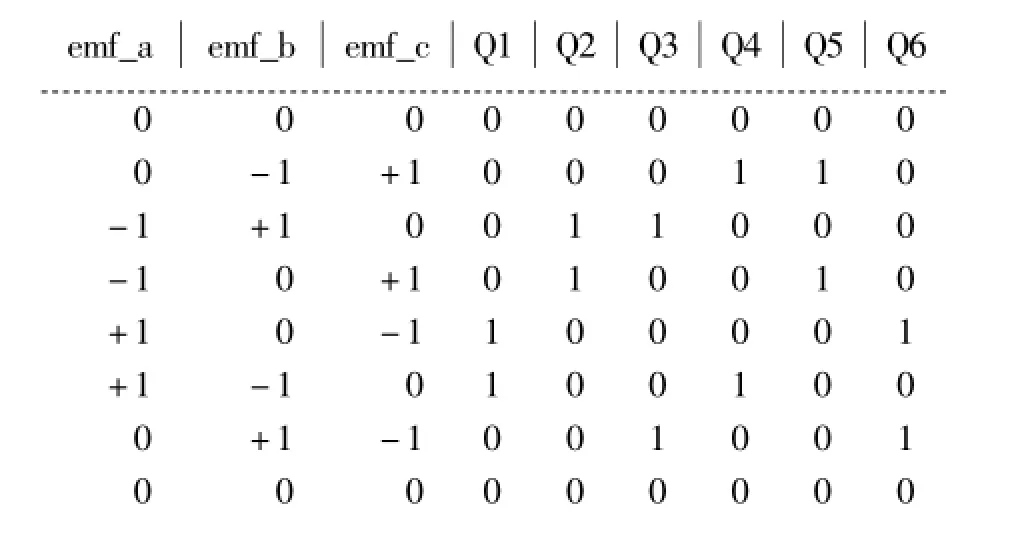
圖3 邏輯關(guān)系
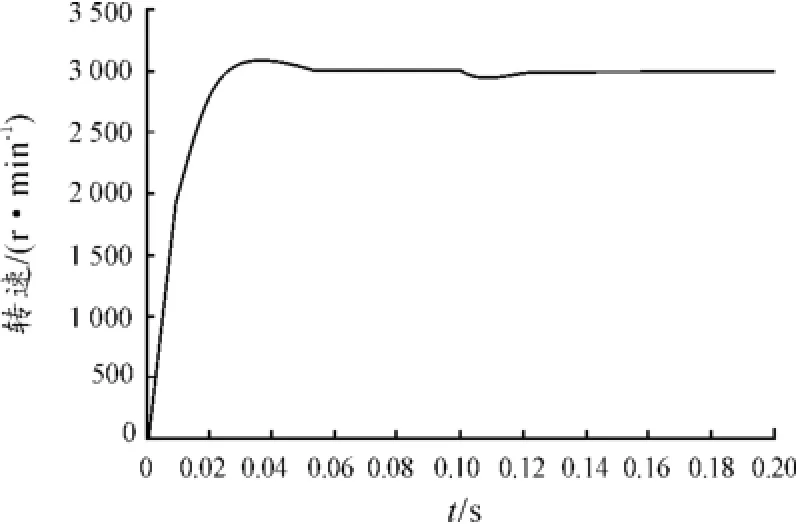
圖4 電動機轉(zhuǎn)速波形
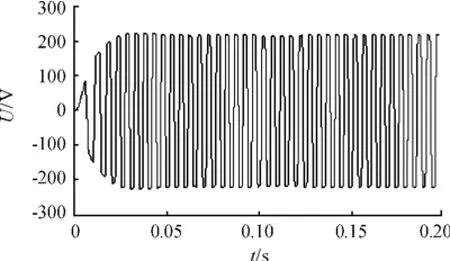
圖5 電動機A相感應(yīng)電動勢電壓
從圖4、5可以清晰地看到,電動機控制系統(tǒng)采用常規(guī)PID控制器時,會出現(xiàn)下列問題:
1)感應(yīng)電動勢產(chǎn)生時間長且不穩(wěn)定,影響了電動機啟動時間,電動機轉(zhuǎn)速從啟動達到3 000 r/min的啟動時間過長;
2)在電動機啟動后的過程中,0.02~0.04 s轉(zhuǎn)速的超調(diào)量比較大,振蕩持續(xù)的時間較長,且直到0.06 s才消失;
3)在0.1 s時,系統(tǒng)加載負載量后,電動機的轉(zhuǎn)速出現(xiàn)了振蕩,直到0.13 s才恢復(fù)到穩(wěn)定狀態(tài)。
3 模糊PID控制器設(shè)計
隨著工業(yè)發(fā)展的需要,對電動機轉(zhuǎn)速范圍、速度響應(yīng)時間、振蕩性等的要求越來越高,簡單的PID控制已不能滿足要求。模糊控制是以模糊集合論、模糊語言變量及模糊邏輯推理為基礎(chǔ)的智能控制[7-9]。模糊控制的基本原理如圖6所示,其核心部件為模糊控制器(圖6虛線框內(nèi))。模糊控制器的控制規(guī)律由計算機程序?qū)崿F(xiàn)[10]。

圖6 模糊控制的基本原理
根據(jù)上述模糊控制原理,將常規(guī)PID控制數(shù)學模型進行數(shù)字化,如式(7)所示。數(shù)字化后的控制器不易受外部的影響,工作性能更加穩(wěn)定,使后期的硬件電路設(shè)計更容易實現(xiàn)數(shù)字化的控制,這對于提高整個系統(tǒng)的精確性、可靠性和穩(wěn)定性有著重要作用。
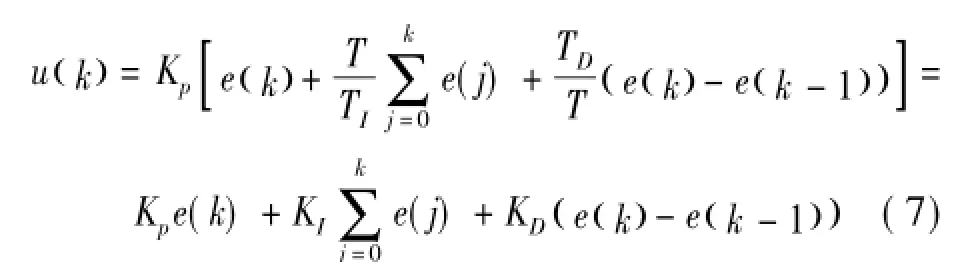
式(7)中:T為采樣周期;e(k),e(k-1)為第k,k-1采樣時刻的輸入偏差值。
圖6的虛線框內(nèi)采用模糊自適應(yīng)PID控制器,則式(7)整理為
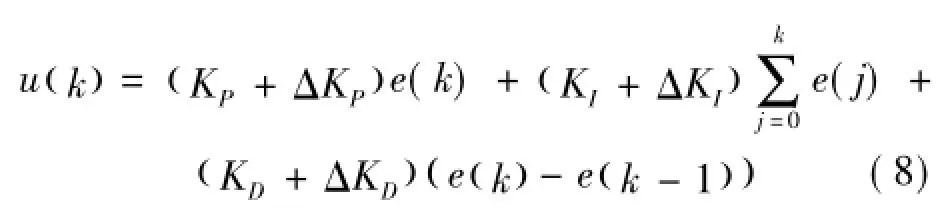
式(8)中:ΔKP,ΔKI,ΔKD為模糊控制器去模糊后輸出的PID控制器調(diào)整參數(shù)。
參照圖6虛線框內(nèi)的原理簡圖,結(jié)合PID控制器,得到圖7所示的模糊PID控制器的結(jié)構(gòu)原理。該控制器采用的是二維模糊控制器,選取給定轉(zhuǎn)速nr與電動機的實際轉(zhuǎn)速n形成的偏差e及偏差的變化率ec(ec=de/dt)作為控制器的輸入變量,輸出為PID調(diào)節(jié)器的參數(shù)修正值,即ΔKP,ΔK,ΔK[11]。
ID
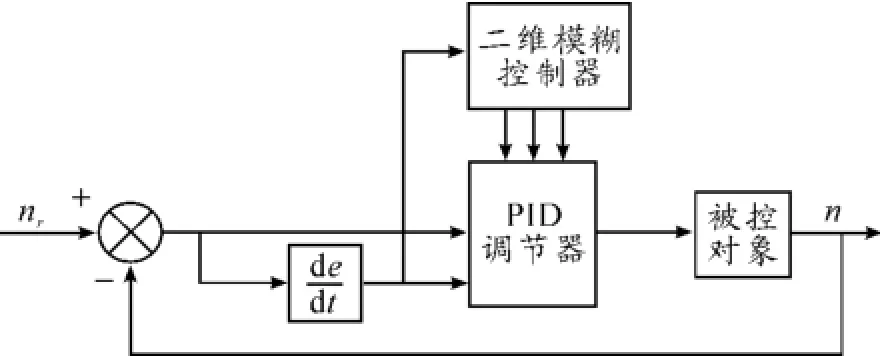
圖7 模糊PID控制器的結(jié)構(gòu)原理
本文將控制器的輸入進行模糊化,輸出進行去模糊化,并設(shè)定其模糊論域為{- 3;- 2;- 1; 0; 1; 2;3},相對應(yīng)的模糊語言為{NB;NM;NS;Z;PS; PM;PB}。在e,ec模糊化和kp,ki,kd去模糊化的過程中,采用如圖8、9所示的隸屬度函數(shù)。
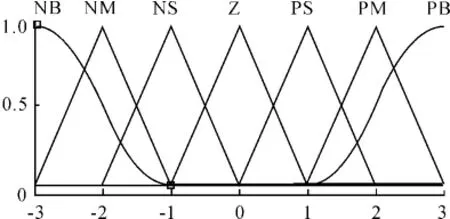
圖8 e,ec模糊化隸屬度函數(shù)
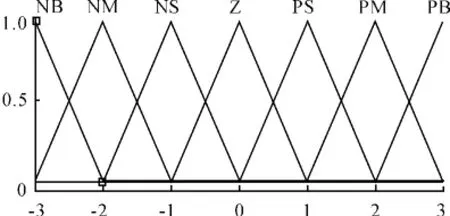
圖9 kp,ki,kd去模糊化隸屬度函數(shù)
按照上述設(shè)定的參數(shù),依據(jù)經(jīng)驗設(shè)定模糊控制規(guī)則表,如表1所示。
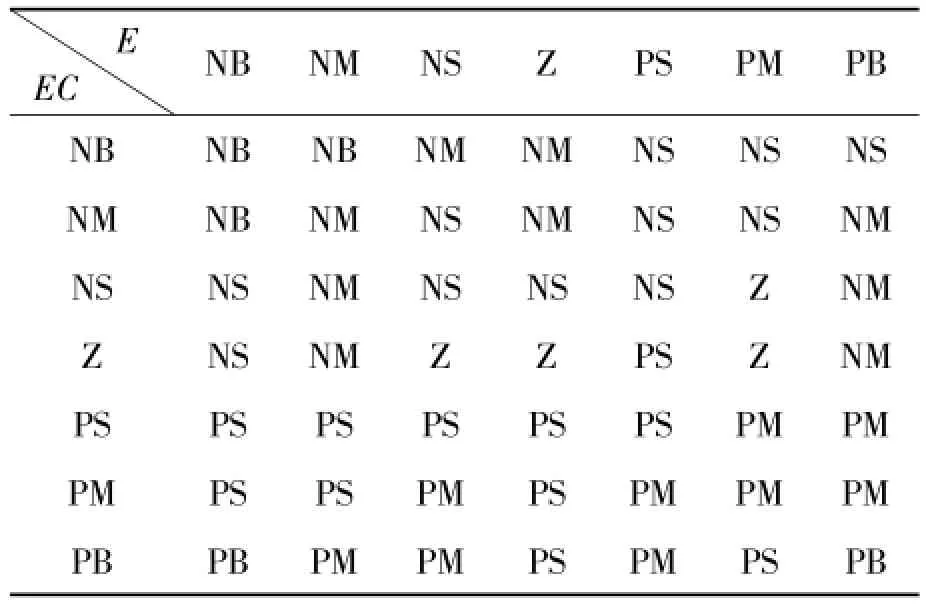
表1 模糊控制規(guī)則表
按照前面所述,在Matlab的Simulink模塊中建立模糊自適應(yīng)PID控制器,其模型如圖10所示。
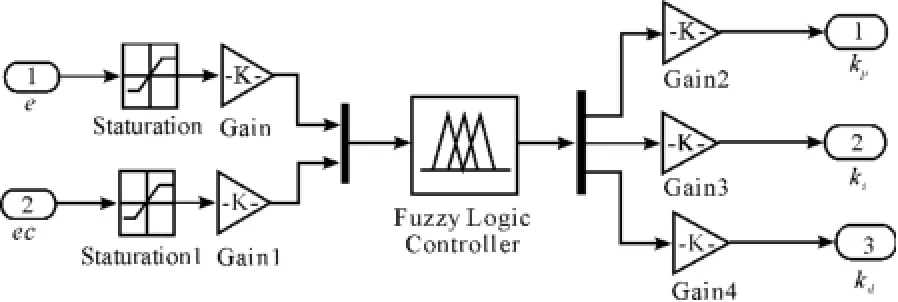
圖10 模糊自適應(yīng)PID控制器
4 模糊自適應(yīng)PID控制系統(tǒng)
按照本文設(shè)計的模糊自適應(yīng)PID控制器,將圖2中的常規(guī)PID改成模糊自適應(yīng)PID控制器,得到如圖11所示的無刷直流電動機模糊自適應(yīng)PID轉(zhuǎn)速控制系統(tǒng)。
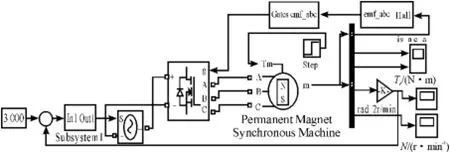
圖11 無刷直流電動機模糊PID轉(zhuǎn)速控制
同樣設(shè)定電動機的額定轉(zhuǎn)速為3 000 r/min,仿真得到圖12所示的轉(zhuǎn)速波形和圖13所示的電動機A相感應(yīng)電動勢電壓。
對比圖4、5,從圖12、13可以明顯看出:電動機的感應(yīng)電動勢產(chǎn)生迅速,使得電動機轉(zhuǎn)速提升較快,從啟動達到穩(wěn)定狀態(tài)的啟動時間更短,接近10 ms,大大縮短了啟動時間;感應(yīng)電動勢電壓在整個過程中幾乎保持在200 V,對系統(tǒng)穩(wěn)定和電機轉(zhuǎn)速恒定起著關(guān)鍵作用;整個運行過程沒有出現(xiàn)明顯的超調(diào)量和振蕩性,系統(tǒng)運行十分穩(wěn)定;在0.1s加載負載量時,控制系統(tǒng)未出現(xiàn)振蕩性,系統(tǒng)運行十分穩(wěn)定。因此,模糊自適應(yīng)控制器對于提高整個控制系統(tǒng)的可靠性和精確性有著非常顯著的效果,對工程應(yīng)用有較大的參考價值。
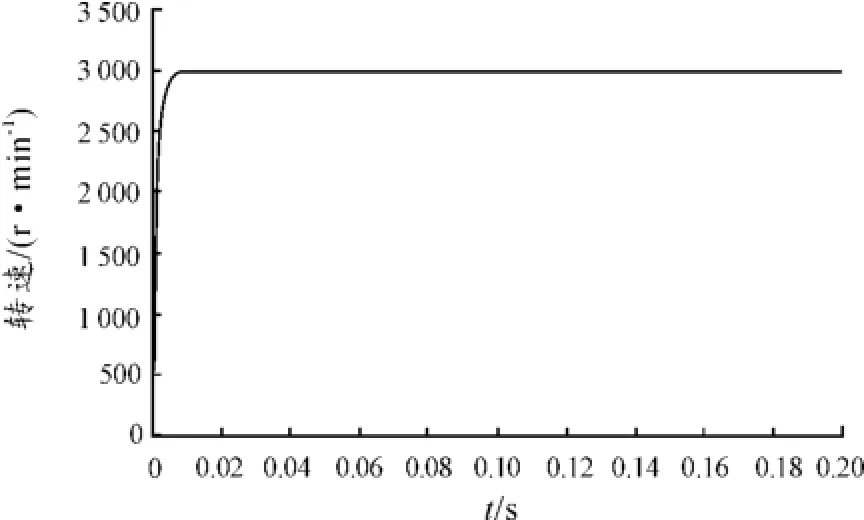
圖12 轉(zhuǎn)速波形
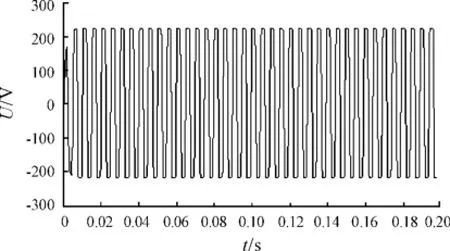
圖13 A相感應(yīng)電動勢電壓
5 結(jié)論
相對于常規(guī)PID控制器,自適應(yīng)模糊PID控制器在無刷直流電動機的控制系統(tǒng)中有著更廣泛的應(yīng)用,具有如下優(yōu)點:
1)大大縮短了電動機的啟動時間,啟動更快速;
2)系統(tǒng)由啟動瞬間到達穩(wěn)定狀態(tài)時,其振蕩性和超調(diào)量幾乎消失,系統(tǒng)運行穩(wěn)定;
3)加載負載量瞬間,系統(tǒng)不存在振蕩性,能夠平穩(wěn)運行;
4)整個控制系統(tǒng)的精確度和準確度大為提高。
[1]李育賢.直流電機調(diào)速系統(tǒng)仿真研究[J].計算機仿真,2011,28(5):205-208,270.
[2]唐艷芳,李鐘慎.STM8低速步進電機控制系統(tǒng)的設(shè)計[J].重慶理工大學學報:自然科學版,2013,27(8): 94-96.
[3]夏長亮.無刷直流電機控制系統(tǒng)[M].北京:科學出版社,2009.
[4]王玉梅.基于DSP無刷直流電動機控制系統(tǒng)的研究[D].山東:山東大學,2008.
[5]蔣達,梁慶輝,蔣清豐.無刷直流電動機PWM調(diào)速控制系統(tǒng)的建模與仿真[J].數(shù)字技術(shù)與應(yīng)用,2012 (2):27-28.
[6]丁學文.電力拖動運動控制系統(tǒng)[M].北京:機械工業(yè)出版社,2007:56-75.
[7]劉鼎.基于DSP的永磁無刷直流電機模糊控制系統(tǒng)的研究與實現(xiàn)[D].長沙:湖南大學,2010.
(責任編輯 劉舸)
[8]郭正玉,梁曉庚.彈道修正彈模糊自適應(yīng)PID控制器設(shè)計[J].四川兵工學報,2013(4):104-106.
[9]梁曉娟,張碩.模糊PID控制的助力模式對操縱穩(wěn)定性影響分析[J].武漢理工大學學報,2012(3):128-131.
[10]Kevin M Passino,Stephen Yurkovich.Fuzzy Control[M].Beijing:Tsinghua University Press,2001:26-57.
[11]戴文俊.基于DSP無刷直流電動機控制系統(tǒng)設(shè)計[D].合肥:安徽工程大學,2012.
(責任編輯 楊黎麗)
Research on Brushless DC Motor Control Application in High Frequency Jet Flow Experiment Device
TANG Kun-peng,SHEN Yue,ZHAN Jie
(Key Laboratory of Advanced Manufacturing Technology for Automobile Parts,Ministry of Education,Chongqing 400054,China)
Based on high frequency jet experiment device control system research,using matlab/simulink modeling and simulation of brushless dc motor control system,aiming at the flaws of the conventional PID controller fuzzy adaptive PID controller is designed to make the control system to achieve the ideal state,meet the brushless dc motor is more widely used.Simulation shows that the fuzzy adaptive PID controller can make the brushless dc motor system response time is shorter,without oscillation and overshoot amount,the system runs stably and better reliability.
brushless DC motor;PID;fuzzy control;oscillatory;overshoot
TP13
A
1674-8425(2014)05-0098-05
10.3969/j.issn.1674-8425(z).2014.05.019
2013-12-10
國家自然科學基金資助項目(51275550)
唐昆鵬(1988—),男,湖北仙桃人,碩士研究生,主要從事機電控制技術(shù)的研究。
唐昆鵬,申躍,詹捷.高頻射流實驗裝置中無刷直流電機控制[J].重慶理工大學學報:自然科學版,2014 (5):98-102.
format:TANG Kun-peng,SHEN Yue,ZHAN Jie.Research on Brushless DC Motor Control Application in High Frequency Jet Flow Experiment Device[J].Journal of Chongqing University of Technology:Natural Science,2014(5):98-102.
