基于雙PWM變換器的軸帶發電系統控制策略研究
2014-06-27 05:45:37趙莉華金陽畢大強張亞超梁勇
船電技術 2014年3期
趙莉華,金陽,畢大強,張亞超,梁勇
(1. 四川大學電氣信息學院,成都 610065;2.電力系統國家重點實驗室,清華大學電機系,北京 100084)
基于雙PWM變換器的軸帶發電系統控制策略研究
趙莉華1,金陽1,畢大強2,張亞超1,梁勇1
(1. 四川大學電氣信息學院,成都 610065;2.電力系統國家重點實驗室,清華大學電機系,北京 100084)
本文提出了一種由雙PWM變換器構成的新型軸帶發電系統控制策略,其整流側將軸帶發電機發出的電壓、頻率變化的交流電變換為直流電;逆變側采用虛擬同步發電機控制策略,使逆變器具有與柴油發電機相似的輸出下垂特性和電氣、機械特性,保證該軸帶發電系統能與常規的柴油發電機組長期穩定并聯運行。在MATLAB/Simulink環境下搭建了該新型軸帶發電系統的仿真模型,對其與柴油發電機組的并聯運行進行了模擬,對模型中轉動慣量對系統的影響進行了分析,驗證了該控制策略的可行性。
軸帶發電機 柴油發電機 虛擬同步發電機 下垂特性 并聯運行
0 引言
在遠洋船舶輔助供電系統中,軸帶發電機由于是利用主機的功率裕量發電,具有提高主機的運行效率、減少柴油發電機運行時間、減少燃油消耗、降低維護成本等優點而占有日益重要的地位[1]。
船舶軸帶發電機由主機驅動,其轉速隨主機轉速的變化而變化,而主機的轉速又是根據船舶航行的需要經常改變的,因此軸帶發電機輸出電壓大小和頻率都是不斷變化的,不能直接并網發電,所以軸帶發電系統首先必須解決恒壓恒頻的問題。目前使用最廣泛的可控硅逆變器式軸帶發電系統,應用可控硅逆變裝置及控制系統調節頻率,用同步補償機提供無功,維持電壓穩定。但這種軸帶發電系統輸出諧波電流大,參數匹配復雜[2],在改善電能質量、能耗、體積、重量、控制速度等方面出現了許多不足[3]。
本文提出了一種由雙PWM變換器構成的新型軸帶發電系統控制策略,其整流側采用基于矢量控制的PWM整流方式,將交流電變換為直流電,并維持直流側電壓恒定;逆變側采用虛擬同步發電機控制策略,采用發電機的二階機電暫態模型,通過模型中轉動慣量J的引入,使得逆變器具有與柴油發電機相似的電氣和機械特性;并且把實現系統下垂特性的功頻控制器模塊和勵磁控制器模塊引入到該控制策略中,使軸帶發電系統的逆變器側具有與柴油發電機相似的輸出下垂特性。
1 基于雙PWM變換器的軸帶發電系統
基于雙PWM變換器的軸帶發電系統結構如圖1所示。
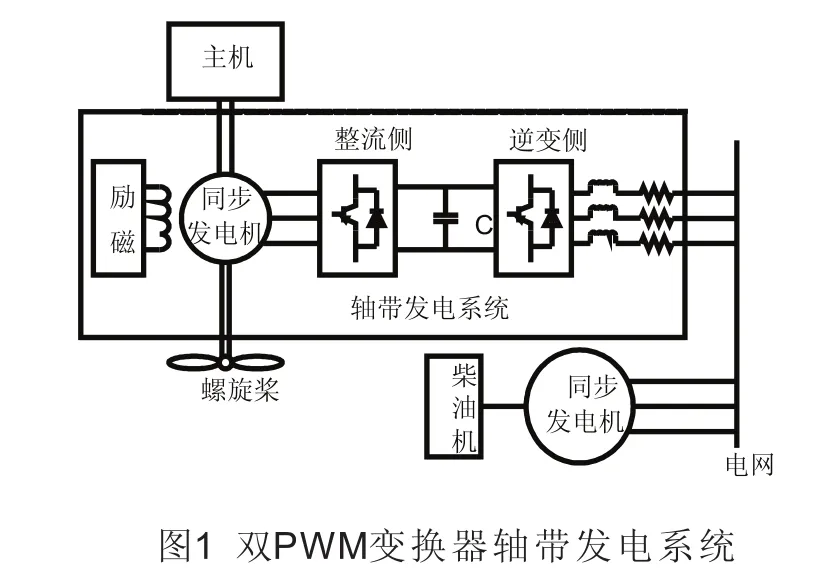
圖1所示軸帶發電系統中,PWM整流器將軸帶發電機發出的電壓和頻率不斷變化的交流電整流成直流,并維持直流側電壓恒定。采用全控橋式PWM整流方式,不僅使同步發電機輸出諧波變小,直流側電壓可控且紋波較小,還可使該軸帶發電系統在較大的轉速范圍內正常運行。
2 虛擬同步發電機控制策略
2.1 虛擬同步發電機建模
根據不同的實際問題,同步發電機的模型可以有不同程度的簡化。本文期望實現發電機有功功率-頻率和無功功率-電壓下垂特性,因此,可采用同步電機的二階機電暫態模型[4]。
式(1)和式(2)中,J為轉動慣量,Ω為機械角速度,MT為機械轉矩,Me為電磁轉矩,為勵磁電動勢,為電樞端電壓,為電樞電流,Ra為電樞電阻,XS為同步電抗。此模型包含電機轉子機械特性和定子電氣特性,并能有效避免復雜的電磁暫態過程,減少影響逆變電源輸出特性的因素,提高模型的實用性。
取同步電機極對數為1,則電機電角速度ω等于機械角速度Ω,對公式(1)變形可得:

式(3)中,ω為電角速度,ωN為同步電角度,PT為機械功率,Pe為電磁功率,θ為電角度。
根據公式(2)、(3),便可在MATLAB/Simulink環境下搭建虛擬同步發電機模型,模型的輸入量為機械功率PT、電磁功率Pe、電樞電流、勵磁電動勢E0,輸出量為電樞端電壓˙。
2.2 有功功率-頻率控制
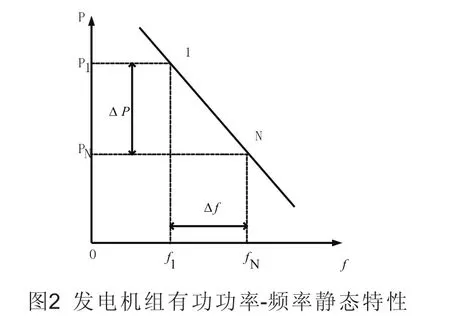
發電機有功功率-頻率靜態特性如圖2所示,假設發電機初始運行于額定工作點N,對應額定頻率fN,額定有功功率PN。當系統負荷增加,使得頻率下降到f1,原動機調速系統的作用使發電機組輸出功率增加到P1,發電機重新穩定運行于1點。可見對下降的頻率Δf,發電機組輸出有功功率增加ΔP,即發電機具有有功功率-頻率下垂特性。定義調差系數為R,有:

以兩臺并聯運行的發電機組為例,當負荷波動時,兩臺發電機輸出有功功率變化量分別為ΔP1、ΔP2,并聯運行時,頻率變化量相等,即Δf1=Δf2,因此:

由式(5)可知,發電機組有功功率分配與機組調差系數成反比,因此,根據發電機組的容量大小,來調整各發電機的調差系數,便可實現有功功率的合理分配。
根據以上原理設計的虛擬同步電機的有功功率-頻率控制器如圖3所示。
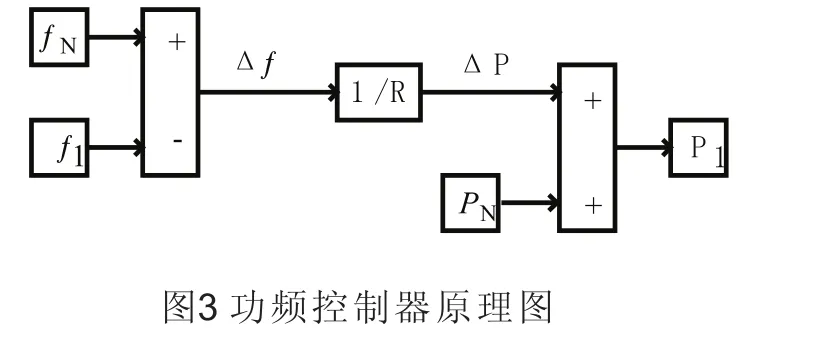
圖3中,控制器輸出量為虛擬同步發電機輸出的有功功率P1,忽略發電機損耗,發電機發出的有功功率與原動機機械功率相等,即P1=PT。
2.3 無功功率-電壓控制
同步發電機作為系統中最主要的無功電源,其無功輸出通過勵磁系統控制,通過勵磁系統調差環節可改變發電機外特性,以實現無功的合理分配,其電壓調節特性如圖4所示。
假設發電機初始運行于額定工作點N,對應額定電壓VN,額定無功QN。當系統無功負荷增大到Q1,發電機發出無功不足時,系統降低電網電壓到V1,以滿足無功平衡,發電機重新穩定工作于1點。可見發電機組升高無功ΔQ,輸出電壓降低ΔV ,即具有無功功率-電壓下垂特性。定義調差系數為δ,則有:

以兩臺并聯運行的發電機組為例,當負荷波動時,兩臺發電機輸出的無功變化量分別為ΔQ1、ΔQ2。并聯運行的發電機電壓變化量相等,即ΔV1=ΔV2,有:

由式(7)可知,發電機組的無功分配與機組的調差系數δ成反比,因此,根據發電機組的容量大小,來調整各發電機的調差系數,便可實現無功的合理分配。根據以上原理設計虛擬同步電機的無功功率-電壓控制器(即勵磁控制器)如圖5所示。

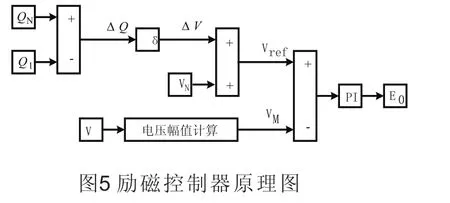
圖5中,V為電網實際電壓,VM為實際電壓的幅值,將其與虛擬同步發電機的電壓幅值參考值Vref的差值進行PI調節,輸出虛擬同步發電機的勵磁電動勢幅值E0。
將功頻控制器的輸出P1(P1=PT)與勵磁控制器的輸出E0分別接入虛擬同步發電機模型中,便可使該虛擬同步發電機模型擁有與柴油發電機組相似的輸出下垂特性。其總控制策略原理如圖6所示。
在該控制策略中,通過功頻控制器模塊和勵磁控制器模塊的引入,使逆變器具有與柴油發電機相似的輸出下垂特性;虛擬同步發電機模型采用公式(2)、(3)所示的二階機電暫態模型,其轉動慣量J的選取,應與柴油發電機的轉動慣量一致,使二者擁有相似的暫態響應特性。最后,將虛擬同步發電機模型的輸出電樞端電壓U作為參考值,輸入到SVPWM調制模塊中,生成相應的脈沖信號,完成逆變側的控制。

3 仿真分析
在MATLAB/Simulink環境下搭建了該軸帶發電系統的仿真模型,虛擬同步發電機的主要參數如下:轉動慣量J=0.1 kg?m2,電樞電阻Ra=0.01 Ω,同步電抗XS=0.25 Ω,額定有功功率PN=20 kW,額定無功功率QN=15 kVar,調差系數R=0.00005,δ =0.00064;與其并聯運行的柴油發電機額定有功功率PN'=80 kW,額定無功功率QN'=60 kVar,轉動慣量J'=0.1 kg?m2。
系統初始運行在額定負荷下,有功負荷100 kW,無功負荷75 kVar;3 s時減小有功負荷10 kW,無功負荷5 kVar;5 s時再減小有功負荷1 0kW,無功負荷5 kVar。軸帶發電系統發出的有功功率和系統頻率分別如圖7(a)、(b)所示。
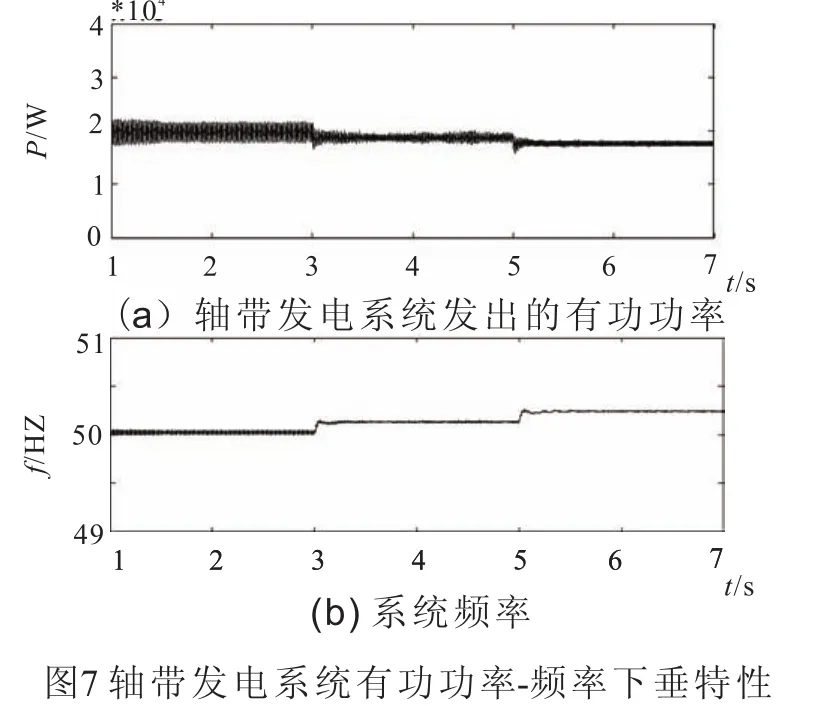
由圖7可以看出,軸帶發電系統的輸出特性按照有功功率-頻率下垂特性變化,有功負荷減小,系統的頻率升高。軸帶發電系統發出的無功功率和系統電壓幅值分別如圖8(a)、(b)所示。由圖8可以看出,軸帶發電系統的輸出特性按照無功功率-電壓下垂特性變化,無功負荷減小,系統的電壓升高。
軸帶發電系統與柴油機并聯運行的有功和無功負荷分配如圖9(a)、(b)所示。由圖9可以看出,兩者能長期穩定并聯運行,且當負荷發生變化時,能按照各自的容量比(1:4)合理分配變化的負荷△P、△Q。
4 結論
本文提出了一種新型的基于雙PWM變換器結構的軸帶發電系統,其整流側將軸帶發電機發出的電壓、頻率變化的交流電變換為直流電;逆變側采用虛擬同步發電機控制策略,使其具有與柴油發電機相似的輸出下垂特性和電氣、機械特性。在MATLAB/Simulink環境下搭建了該新型軸帶發電系統的仿真模型,對其控制策略進行了驗證。與其他軸帶發電系統相比,本文介紹的基于雙PWM變換器結構的軸帶發電系統具有結構緊湊、成本低、可控性強、能耗小、輸出電能質量高等優點,具有廣泛的應用前景。


[1] Liu Yijian. Development of a new-type shaft-driven generator. electronic measurement and instruments, 8th International Conference on 2007.
[2] T. Kataoka, S.Nislukata. Transient performance analysis of self-controlled synchronous Motors. IEEE Trans.on industry applications. 1981, 17(2):100-103.
[3] 李亮, 劉以建, 喻多祥. 船舶軸帶發電機的發展與新方法的研究. 船電技術, 2009, 29(5):5-9.
[4] Z. Haznadar. Modeling of ship’s shaft generator. International Symposium on Power Electronics, 2006.
Research on Control Strategy of Shaft-driven Generator System with Dual PWM Converter
Zhao Lihua1,Jin Yang1, Bi Daqiang2,Zhang Yachao1,Liang Yong1
(1.College of Electrical Engineering & Information, Sichuan University, Chengdu 610065, China; 2. State Key Lab of Power System, Dept of Electrical Engineering, Tsinghua University, Beijng 100084, China)
A new control strategy of marine shaft-driven generator system with dual PWM converter is introduced in this paper. The rectifier side changes varying AC to DC, and the inverter side adopts the virtual synchronous generator based on control algorithm to achieve the droop characteristics and electrical-mechanical characteristics, which are similar with the diesel generator system. This will ensure the marine shaft-driven generator system can operate with the diesel generator system in parallel for a long time. The simulation model of the new shaft-driven generator system is built by using MATLAB/Simulink and the parallel operation with the diesel generator system is simulated, the influence of the rotational inertia in the model is analyzed, and the control strategy is verified.
shaft-driven generator; diesel generator; virtual synchronous generator; droop characteristics; parallel operation
TM34
A
1003-4862(2014)03-0065-04
2013-09-17
趙莉華(1968-),女,碩士,副教授。研究方向:開關電源、電力電子設備控制技術。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(2017年9期)2017-09-26 03:41:45
大電機技術(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
通信電源技術(2016年1期)2016-04-16 04:57:26