高旋彈丸背景渦流磁場建模與補償
2014-06-23 07:46:16向超卜雄洙祁克玉于靖
哈爾濱工程大學學報 2014年4期
關(guān)鍵詞:磁場
向超,卜雄洙,祁克玉,于靖
(1.南京理工大學 機械工程學院,江蘇 南京210094;2.機電動態(tài)控制重點實驗室,陜西 西安710065;3.上海機電工程研究所,上海201109)
地磁導航具有全天時、全天候、全地域、能耗低的優(yōu)良特征,在導航定位、戰(zhàn)場電磁信息對抗等領(lǐng)域展現(xiàn)了巨大的軍事潛力[1-2]。隨著地磁測量技術(shù)的發(fā)展,利用地磁測量來實現(xiàn)姿態(tài)測試和制導的方法已經(jīng)成為彈體姿態(tài)信息獲取的重要手段之一。目前地磁導航測姿主要有2種形式:1)利用地磁場在載體坐標系內(nèi)的三分量和某一個已知的姿態(tài)角來求取其余姿態(tài)信息;2)利用地磁匹配的方法來確定載體位置和姿態(tài)[3]。
彈體主要由鐵磁物質(zhì)組成,目前所有利用地磁來進行彈體姿態(tài)測量的方法都面臨背景磁場的干擾問題[4]。背景磁場的復雜性使得其成為制約彈上地磁場高精度測量的瓶頸,這導致彈體地磁導航測姿技術(shù)目前還處于輔助的地位。研究更精確、更高效的彈體背景磁場補償方法是當前急需解決的關(guān)鍵問題。傳統(tǒng)的磁補償方法主要從磁傳感器的零位誤差、垂直誤差、靈敏度誤差入手,建立磁傳感器的羅差補償模型,先后出現(xiàn)了泊森(Poisson)公式補償法、橢圓擬合補償法、十二位置標定法、最小二乘補償法等[5-6]。這些方法只研究了靜態(tài)情況下載體所受軟硬磁干擾的影響,對載體高速、高旋狀態(tài)下的渦流等影響沒有進行討論,在一定程度上存在局限性,不能滿足旋轉(zhuǎn)彈丸高速飛行過程中的渦流干擾磁場的補償要求。為了實現(xiàn)彈上高精度地磁測量,本文根據(jù)旋轉(zhuǎn)彈體的材料特點和運動特征,對高旋彈體運動過程中產(chǎn)生的渦流磁場進行了理論研究和數(shù)學建模,通過數(shù)值仿真與半實物實驗來分析渦流磁場對姿態(tài)測量精度的影響。
1 渦流磁場的產(chǎn)生原理與基本模型
當彈體在空間中高速運動時,彈體外殼形成閉合回路,通過其包圍面積的磁通量隨著地磁場在彈體坐標系三軸分量的變化而變化,在回路中產(chǎn)生渦旋電流,該電流反過來產(chǎn)生阻止這種變化的渦流感應磁場,用磁感應強度矢量Bbe表示。彈體外殼厚度要遠小于與其徑向尺寸,考慮到渦流現(xiàn)象中的集膚效應[7],在分析彈丸的渦流感應背景干擾磁場時只考慮外殼表面的渦電流現(xiàn)象。為了簡化分析,將彈體外殼等效為一個兩端封閉的空心圓柱體,以圓柱體質(zhì)心為原點建立彈體坐標系o-xbybzb。
1.1 x軸方向的渦流磁場
針對彈體xb軸方向地磁分量變化,根據(jù)外殼物理特性,將其等效為法線方向為xb軸的N匝線圈串聯(lián)組成的有限長直螺線管物理模型,如圖1所示。
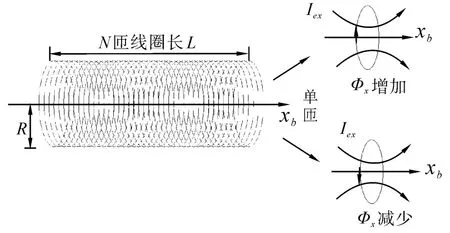
圖1 xb軸渦流分析時彈體外殼的等效線圈模型Fig.1 Equivalent coil model of projectile shell in xbanalysis
圖1中R為彈體徑向半徑,L為軸向長度。令單個等效線圈的等效電阻為Rx,根據(jù)法拉第電磁感應定律[8],可得由地磁場在xb軸上的分量Bbx的變化引起的渦流電流Iex為

根據(jù)畢奧-薩伐爾定理[9],可以得到彈體在空間運動過程中xb軸上中點處沿Bbx變化的反方向產(chǎn)生的渦流干擾磁感應強度為


其中,n為單位長度內(nèi)等效模型線圈的匝數(shù),其值與彈體材料的導電性能有關(guān)。exx由彈體材料的物理特性 (μr,n,Rx)和結(jié)構(gòu)尺寸 (L,R)所決定,一旦材料和結(jié)構(gòu)確定,exx是固定的常數(shù)。
1.2 y、z軸方向的渦流磁場
針對yb軸方向地磁分量的變化,將彈體外殼等效為法線方向為yb軸的N個矩形線圈組成。由感應電流引起的渦流磁場同理可以按xb軸方向上的分析方法得到


2 三軸耦合的渦流磁場模型
前文選取的等效線圈法線方向都與彈體坐標軸平行,使得在研究其中任一單軸向的渦流磁場時,不存在其他兩軸的交叉干擾。實際中彈體外殼構(gòu)成一個封閉的包裹曲面,曲面中的潛在電流回路的方向是多種多樣的。
2.1 三軸渦流磁場的磁偶極子等效物理模型
對彈體外殼結(jié)構(gòu)進行適合于實際情況的標準等效線圈劃分,即將彈體外殼等效為N個不同法線方向的閉合回路線圈的集合。等效線圈的法線方向與3個彈體坐標軸都存在一個夾角。定義任意一個等效線圈i的法線方向ni與彈體坐標軸xb、yb、zb所成的夾角分別為βix、βiy、βiz,如2圖所示。
對于單個標準等效線圈i,設其線圈平面所圍面積大小為Si,其法線方向的磁感應強度的大小為彈體坐標系三軸方向的地磁場分量在其法線ni方向上的投影之和,即

設線圈的等效電阻為 Ri,令 wix=-Si·cos βix/Ri,wiy=-Si· cos βiy/Ri,wiz=-Si·cos βiz/Ri,則線圈i中由于磁通量Φi的變化而產(chǎn)生的感應電流為

單個線圈i法線方向等效渦流磁矩大小為mien=Si·Iie,將其投影到彈體坐標系三軸上有

式中:qiab=Si·cos βia·wib(a=x,y,z;b=x,y,z)。彈體坐標系三軸方向渦流總磁矩等于N個等效線圈所產(chǎn)生渦流磁矩之和,令則有
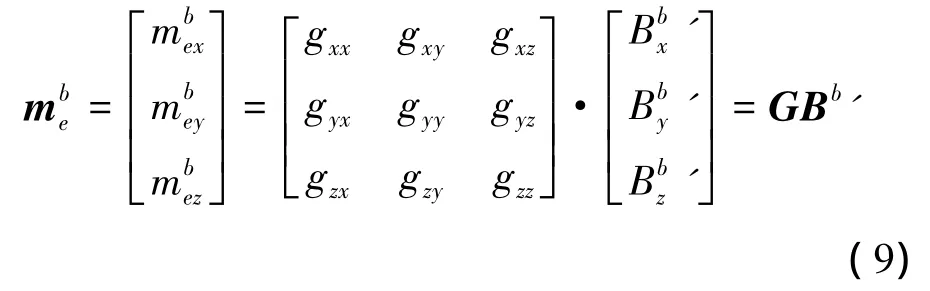

圖2 任意等效線圈的示意圖Fig.2 Schematic diagram of the equivalent coil

圖3 渦流背景磁場磁偶極子等效模型Fig.3 Magnetic dipole model of eddy-current magnetic field
2.2 三軸渦流磁場的數(shù)學模型
設空間中有一磁矩m,以其對應的磁偶極子中心為原點,磁矩方向為z軸建立如圖4所示的空間直角坐標系o-xyz與球坐標系(r,θ,φ)。
定義磁矩m所在空間的磁導率為μ,r為磁偶極子中心O到空間N(r,θ,φ)點的距離。根據(jù)坐標投影原理和磁矩空間感應強度分布理論[10],磁矩m在空間球坐標系內(nèi)N點處產(chǎn)生的磁感應強度在坐標系o-xyz三軸方向上的分量大小BNx、BNy、BNz可表示為

實際工作中磁傳感器的安裝位置不在載體坐標系原點,而是空間某點N處。利用式(9)、(10)可求得彈體坐標系內(nèi)3個等效渦流磁矩在彈上安裝的磁傳感器三軸方向上所產(chǎn)生的磁感應強度。磁傳感器受到的載體渦流干擾磁場的數(shù)學模型為


式中:E為渦流磁場模型的渦流參數(shù)矩陣。渦流系數(shù)的具體表達式如下:式中:rs為磁傳感器安裝中心到彈體坐標系原點的距離;θi、φi(i=x,y,z)是磁傳感器安裝中心在球坐標系中的坐標參數(shù)。從上述渦流系數(shù)的表達式可以看出,渦流系數(shù) eij(i=x,y,z;j=x,y,z)與彈體的材料特性、尺寸、磁傳感器安裝位置有關(guān),只要這些參數(shù)確定,eij就是常數(shù)。

圖4 磁矩在空間某點的磁感應強度分布Fig.4 Magnetic induction intensity distribution of m in space
3 渦流磁場引起的姿態(tài)角誤差分析
在彈上地磁場的測量過程中,磁傳感器實際檢測到的磁感應強度Bm是同時包括地磁場Bb(被測量)和渦流干擾磁場的。綜合式(11)和傳感器理論輸出模型[11]可以得到磁傳感器的真實輸出模型:

式中:P、K分別為硬磁、軟磁干擾矩陣;R=KE為渦流干擾矩陣。從式(12)可以看出,由于渦流干擾磁場的存在,使得磁傳感器真實輸出電壓中出現(xiàn)了相應的附加干擾成分。
利用測量地磁場在彈體坐標系內(nèi)三軸分量來解算姿態(tài)角時,渦流干擾磁場會引起地磁分量測量誤差,進而造成姿態(tài)角的解算誤差。在只考慮磁場測量誤差傳遞的情況下,根據(jù)函數(shù)誤差傳遞理論[12]和地磁測姿算法,利用已知的俯仰角θ求取偏航角ψ和橫滾角γ的測量誤差為

其中,A=BH·cos ψ·sin θ+BZ·cos θ;B=BH·sin ψ;BH表示地磁場水平強度;BZ表示地磁場垂直強度。
4 數(shù)值仿真與半實物實驗研究
4.1 數(shù)值仿真分析
通過MATLAB軟件仿真分析彈體渦流背景磁場對姿態(tài)角解算誤差的影響。根據(jù)IGRF11模型,得到南京地區(qū)BH=33 100 nT,BZ=36 928 nT。根據(jù)某型彈丸的材料特性和前期分析工作[13],將彈丸渦流磁場參數(shù)設置如下:
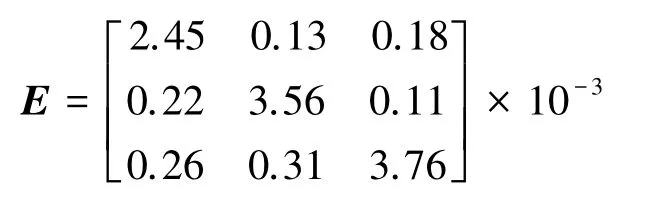
按如下條件進行了仿真:θ=60°,ψ=30°;橫滾角速率分別為 0、10、20、60、100、200 r/s。磁傳感器噪聲是均值為零、均方根為10 nT的隨機白噪聲。表1對不同橫滾角速度時有無渦流磁場的影響情況下姿態(tài)角解算誤差進行了對比。
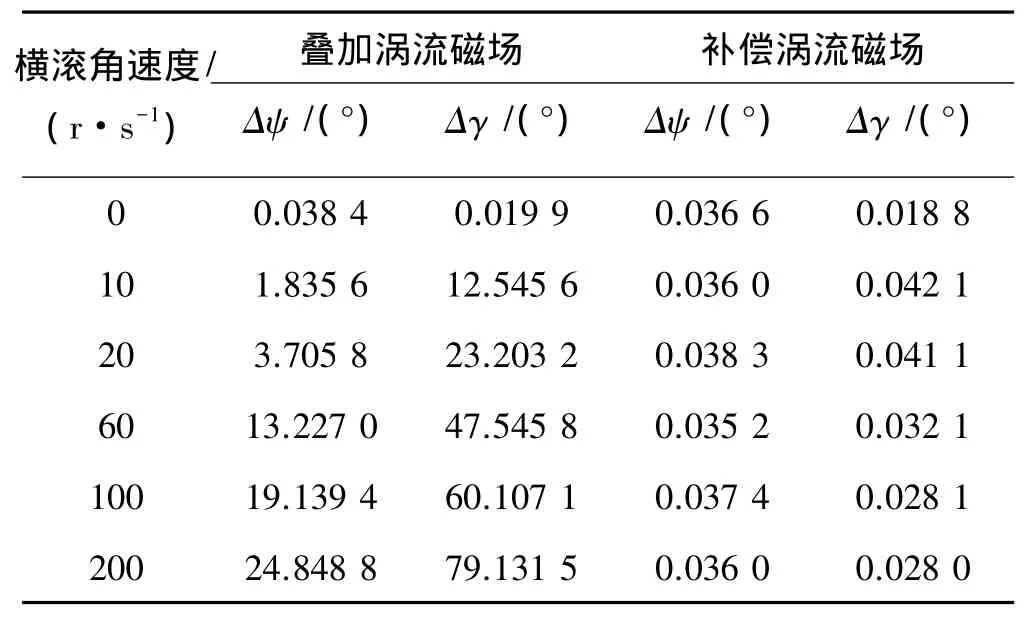
表1 當θ作為已知量時,ψ和γ的姿態(tài)角誤差Table 1 Errors of ψ and γ when θ as a known quantity
通過表1可以看出:在疊加渦流磁場的情況下,姿態(tài)角誤差要遠大于由于傳感器噪聲產(chǎn)生的誤差。通過渦流磁場補償后,姿態(tài)角誤差滿足高精度測量的要求。比較不同橫滾角速度情況下的誤差可以看出:隨著橫滾角速度的增加,渦流干擾磁場對姿態(tài)角解算精度的影響也隨著增大。
4.2 半實物實驗研究
利用三軸轉(zhuǎn)臺在三維空間模擬彈體的實際運動狀態(tài),進行半實物實驗研究。半實物測量系統(tǒng)硬件設計選用磁傳感器HMC1021/1022作為地磁敏感元件,采用C8051F320為微控制器,MAX1168為 AD芯片,AT45DB642D為外部存儲芯片。系統(tǒng)采用數(shù)據(jù)采集回收處理的方式,利用Labview軟件實現(xiàn)磁傳感器測量數(shù)據(jù)的USB回讀,并通過MATLAB軟件進行渦流補償和姿態(tài)角解算。轉(zhuǎn)臺實驗現(xiàn)場如圖5所示。
實驗前利用系統(tǒng)辨識[14]的方法根據(jù)式(12)對半實物裝置的硬磁、軟磁、渦流干擾矩陣進行了估計,得到以下結(jié)果:


實驗時將半實物裝置固定在轉(zhuǎn)臺上,在偏航角30°±4°,俯仰角35°±10°范圍內(nèi)變化,橫滾角正向連續(xù)變化。經(jīng)消噪后的傳感器輸出曲線如圖6所示。

圖5 半實物轉(zhuǎn)臺實驗現(xiàn)場Fig.5 Hardware-in-the-loop turntable experiment site
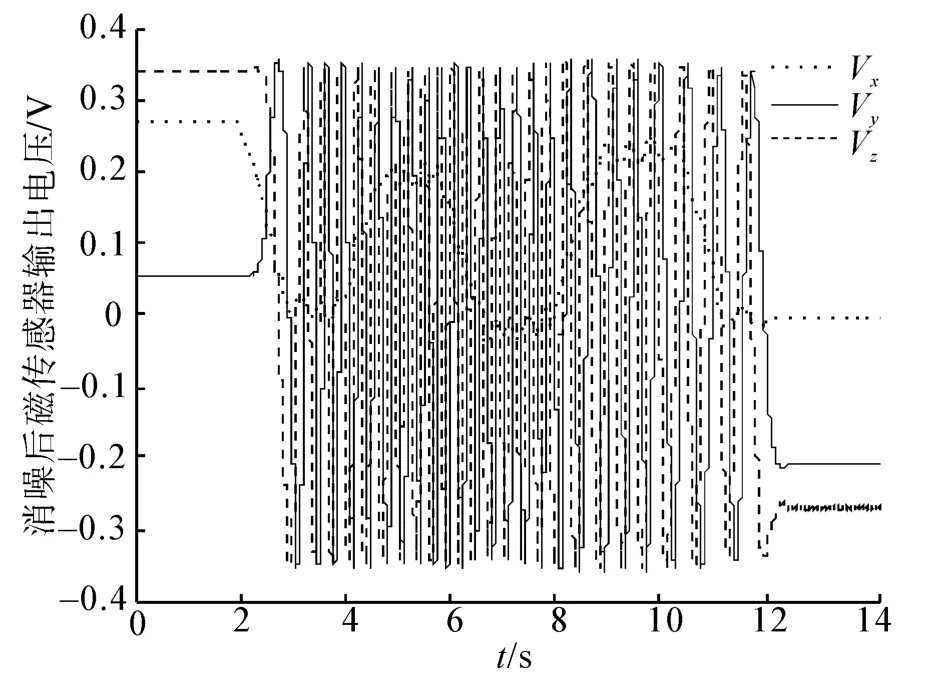
圖6 消噪后磁傳感器輸出曲線Fig.6 Magnetic sensor output curve after de-noising
以每個時刻轉(zhuǎn)臺輸出的姿態(tài)角(精度達0.01°)作為標準值,結(jié)合當?shù)氐卮艆?shù)(BH=33 100 nT,BZ=36 928 nT),可得到地磁分量理論檢測值。圖7與圖8分別為測量系統(tǒng)只經(jīng)過軟硬磁補償和經(jīng)過渦流、軟硬磁補償后的地磁三分量測量誤差。
對比圖7和圖8不難發(fā)現(xiàn):經(jīng)過渦流補償后的彈體坐標系地磁場三分量的最大測量誤差在0.01 A/m以內(nèi),要遠小于只進行軟硬磁補償后的地磁測量誤差。實驗中以轉(zhuǎn)臺輸出的俯仰角θ為已知量,利用不同補償程度下的三軸地磁分量值進行偏航角ψ和橫滾角γ的解算,結(jié)果如表2所示。

圖7 只經(jīng)過軟硬磁補償后地磁測量誤差Fig.7 Geomagnetic measuring error after a hard and soft magnetic compensation only

圖8 經(jīng)過渦流、軟硬磁補償后的地磁測量誤差Fig.8 Geomagnetic measuring error after eddy-current,hard and soft magnetic compensation
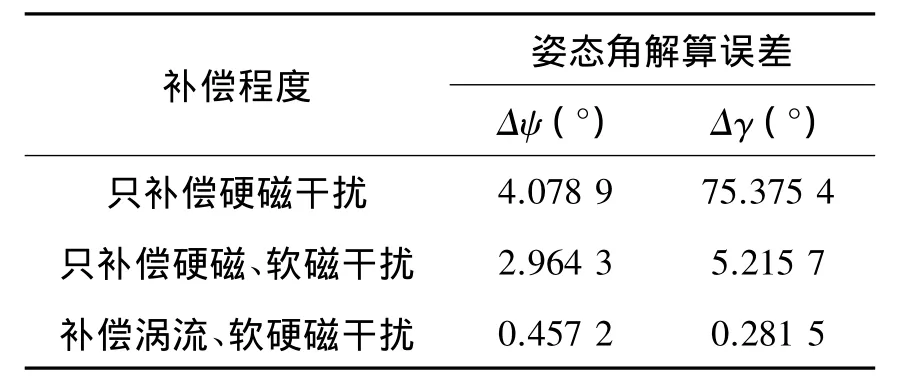
表2 不同補償效果下姿態(tài)角解算誤差的結(jié)果比較Table 2 Results of attitude angle calculating errors under different compensation effect
從表2的結(jié)果可以看出,利用經(jīng)過渦流補償后的地磁分量測量值進行姿態(tài)角解算的誤差在±1°以內(nèi)。通過對不同補償程度下地磁分量的測量誤差以及相應的姿態(tài)求解誤差的比較,可以證明利用所提出的高旋彈丸背景渦流磁場模型來進行彈上地磁測量綜合補償是可行和有效的。對于高精度彈丸姿態(tài)測量的要求(姿態(tài)角誤差±1°以內(nèi)),必須要對背景渦流磁場進行補償。
5 結(jié)束語
本文針對高旋彈體地磁定姿的要求,分析了載體背景渦流磁場的產(chǎn)生機理,建立了單軸感應下的渦流磁場模型。在此基礎(chǔ)上通過研究彈丸渦流磁場的等效磁偶極子物理模型來建立三軸耦合渦流磁場的數(shù)學模型。通過對渦流磁場引起的姿態(tài)角測量誤差進行理論分析、數(shù)值仿真和半實物實驗,證明了所建渦流磁場模型用于地磁測量補償?shù)挠行浴1疚慕⒌臏u流磁場數(shù)學模型,為進一步提高彈上地磁測量精度提供了理論依據(jù),對高旋載體的地磁定姿技術(shù)的研究具有借鑒意義。
[1]周軍,葛致磊,施桂國,等.地磁導航發(fā)展與關(guān)鍵技術(shù)[J].宇航學報,2008,29(5):1467-1472.ZHOU Jun,GE Zhilei,SHI Guiguo,et al.Key technique and development for geomagnetic navigation[J].Journal of Astronautics,2008,29(5):1467-1472.
[2]黃顯林,李明明,盧鴻謙,等.非線性地磁/GPS/SINS組合導航方法[J].哈爾濱工程大學學報,2010,31(10):1340-1347.HUANG Xianlin,LI Mingming,LU Hongqian,et al.Nonlinear geomagnetic/GPS/SINS integrated navigation[J].Journal of Harbin Engineering University,2010,31(10):1340-1347.
[3]LIU Y J,ZHAO Y,WU F L.An improved geomagnetic matching algorithm using rotation angle search technique[J].Advanced Materials Research,2012,383:7576-7581.
[4]INAMORI T,SAKO N,NAKASUKA S.Magnetic dipole moment estimation and compensation for an accurate attitude control in nano-satellite missions[J].Acta Astronautica,2011,68(11):2038-2046.
[5]劉仁浩,王華.數(shù)字磁羅盤的全姿態(tài)羅差補償[J].光學精密工程,2011,19(8):1867.LIU Renhao,WANG Hua.All attitude magnetic deviation compensation for digital magnetic compass[J].Optics and Precision Engineering,2011,19(8):1867.
[6]ROGERS J,COSTELLO M,HARKINS T,et al.Effective use of magnetometer feedback for smart projectile applications[J].Navigation,2011,58(3):203-219.
[7]YAMAZAKI K,F(xiàn)UKUSHIMA Y.Effect of eddy-current loss reduction by magnet segmentation in synchronous motors with concentrated windings[J].IEEE Transactions on Industry Applications,2011,47(2):779-788.
[8]尹國盛.大學物理(下冊)[M].北京:機械工業(yè)出版社,2010:108-132.
[9]GRIFFITH J M,PAN G W.Electromagnetic fields generated by arbitrarily shaped current loops[J].IET Science,Measurement& Technology,2012,6(4):298-305.
[10]YANG Yuntao,SHI Zhiyong,GUAN Zhenzhen,et al.A magnetic disturbance compensation method based on magnetic dipole magnetic field distributing theory[J].Journal of China Ordnance,2009,5(3):185-191.
[11]LI D,WO S L,BU X Z.Twelve-position calibrating method without north using for three-axis magnetic Sensor[J].Advanced Materials Research,2012,383:5082-5087.
[12]吳石林.誤差分析與數(shù)據(jù)處理[M].北京:清華大學出版社,2010:242.
[13]李玎,卜雄洙,向超,等.全磁傳感器彈體定姿布陣與半實物仿真[J].南京理工大學學報:自然科學版,2010,34(5):608-612.LI Ding,BU Xiongzhu.XIANG Chao,et al.Configuration and half size hardware-in-the-loop simulation of projectile attitude determination based on magnetic sensors only[J].Journal of Nanjing University of Science and Technology:Natural Science,2010,34(5):608-612.
[14]VASUMATHI B,MOORTHI S.Improved neural network algorithms with time-varying Widrow-Hoff learning rule for harmonic estimation[J].Australian Journal of Electrical&Electronics Engineering,2012,9(4):377-385.
猜你喜歡
當代陜西(2022年6期)2022-04-19 12:11:54
數(shù)學物理學報(2022年1期)2022-03-16 06:14:50
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
華人時刊(2020年13期)2020-09-25 08:21:42
中學生數(shù)理化(高中版.高二數(shù)學)(2020年1期)2020-02-20 13:22:30
中學生數(shù)理化(高中版.高考數(shù)學)(2017年3期)2017-05-04 07:15:09
中學生數(shù)理化·高二版(2016年12期)2017-02-28 10:08:42
電子制作(2016年1期)2016-11-07 08:42:44
Coco薇(2016年1期)2016-01-11 16:53:24
西華師范大學學報(自然科學版)(2015年3期)2015-02-27 15:31:23