Comprehensive obstacle avoidance system based on the fuzzy control for cleaning robot
2014-06-09 14:44:40JianlongZHANGXiaoyuLIULihuaLI
機床與液壓 2014年3期
關鍵詞:效果
Jian-long ZHANG,Xiao-yu LIU,Li-hua LI
School of Information,Wuhan University of Science and Technology,Wuhan 430081,China
Comprehensive obstacle avoidance system based on the fuzzy control for cleaning robot
Jian-long ZHANG?,Xiao-yu LIU,Li-hua LI
School of Information,Wuhan University of Science and Technology,Wuhan 430081,China
To put forward a comprehensive cleaning robot obstacle avoidance scheme,on the basis of solid obstruction of traditional road environment to join liquid obstacles on the road,this paper designed the fuzzy controller,through environmental information detected five set of sensors,to avoid this solid obstruction of the front-left,front-right,left and right side,remove liquid barrier,and achieve the comprehensive effect of obstacle avoidance.The effect has been verified through MATALAB simulation experiment.
Cleaning robot,Fuzzy control,Obstacle avoidance
1.Introduction
Along with the social progress,the development of science and technology,people have increasingly rich material life,and hope to improve the quality of life,expect to use products of science and technology to replace manual labor,cleaning robot is one example,cleaning robot,which is on the mobile robot to add some specific device,make it achieve the effect of the automatic cleaning the dust[1-2].
Have automatic sweeping machine sold on the market at present,this means the technology has been mature.How does the cleaning robot to avoid obstacles and effectively prevent collision?For this reason,this article will put forward a kind of cleaning robot all-round obstacle avoidance system based on fuzzy control,the system not only expounds the control algorithm of robot obstacle avoidance,and joins to the processing of the ground water,which makes clean robot truly achieve all-round obstacle avoidance.
2.The system structure of cleaning robot
Three wheels of disc structure are used in cleaning robot,chassis with three wheels is shown in Figure 1,two wheels in the front as the driving wheel,using two motor drive alone,behind wheel as auxiliary wheel,supporting the body,the driving wheel control robot move forward,turn left,turn right,and other functions,when obstacles are detected in the surrounding environment.Cleaning robot change the movement direction by controlling the pace of the two drive wheels,when the speed of the left wheel is greater than the right wheel,the robot turn right,when the speed of the right wheel is greater than the left,the robot turn left,when the speed of two wheels is consistent,the robot straight line.A cleaner is installed in the central location of the disc,which was used for cleaning the dust.An automatic metal rod is installed at the end of the cleaning robot. A strong water absorbing sponge is embedded at metal bar front-end,when water are detected at running route,cleaning robot can timely absorb water.
Ultrasonic sensors and infrared sensors are widely used in the field of application ofmobile robot,ultrasonic sensor cost is low,the installation is more convenient.The price of infrared sensor is not high,but the precision of measurement is high,and its direction is quite strong.In the practical application of mobile robots,ultrasonic sensors and infrared sensors can realize the complementary on the function[3-5].Such as,some material which can not reflect infrared light can reflect ultrasonic wave,but a lot of material what ultrasonic wave can’t detect can be easily detected by infrared distance sensors.So the cleaning robot uses infrared sensors and ultrasonic sensors at the same time test pavement of surrounding environment,using ultrasonic liquid level sensor for liquid form obstacles for testing.As shown in Figure 1,10 sensors are respectively installed around the disc in this article.Installing respectively an infrared sensor and an ultrasonic sensor on the left and right sides,they use it to detect obstacle distance.An infrared sensor and an ultrasonic sensor are respectively installed on the front-left and front-right.Two ultrasonic liquid level sensors are installed in the front and rear for sending and receiving of ultrasonic.Two sensors are installed in the front and rear must downward sloping about30 degrees.Others sensors should be installed in the same level with cleaning robot.
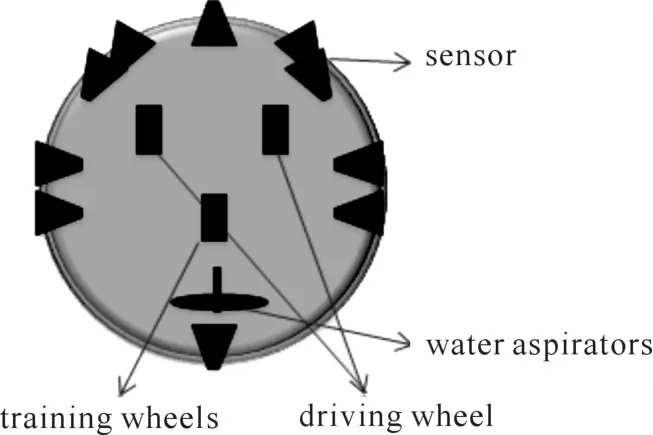
Figure 1.Construction diagram of cleaning robot
3.The design of fuzzy controller
Fuzzy Logic Control referred to as"Fuzzy Control”,is a computer numerical control technology based on the fuzzy set theory,fuzzy language variable and fuzzy logic reasoning[6].In the field of traditional control,if the control system dynamic model is accurate,quite a key effect for the control effect is good or bad.The more detailed system dynamic information,the more precise control.But it is difficult to accurately describe the system dynamically because of many variables for more complex systems,so the researchers used a variety of methods to simplify the system dynamics for achieving the purpose of control,but the effect is bad.To sum up,the traditional control theory for the specific control system has a great effective,but the control effect is poorer for more complex systems.So we try to use fuzzy mathematics to deal with these control problems.After the introduction of fuzzy set,people’s judgment and thinking process can be expressed in the form of a relatively simple mathematical,which will make it possible that make a processing conforming to the way of thinking and the actual for more complex system.
The fuzzy controller is the core of the fuzzy control system,and it can be divided into the four important parts:knowledge base,fuzzy reasoning,fuzzification and defuzzification.Knowledge base include the database and the“if-then”rule library,database define membership functions,scale transformation factor,the fuzzy classification.Fuzzy rules are associated with expert experience or knowledge of the summary in the field.In accordance with these rules and facts given by the partial,reasoning sections perform reasoning process and find out reasonable output.Fuzzy input converts clear input into fuzzy quantity expressed by the fuzzy set,then controlled quantity is got according to the Fuzzy reasoning,but the controlled quantity is also fuzzy.So we must convert fuzzy control into a clear value as the output of fuzzy controller,defuzzification is the process that convert the fuzzy calculation results into clear output.The fuzzy controller of cleaning robot for this paper has a structure diagram as shown in Figure 2.
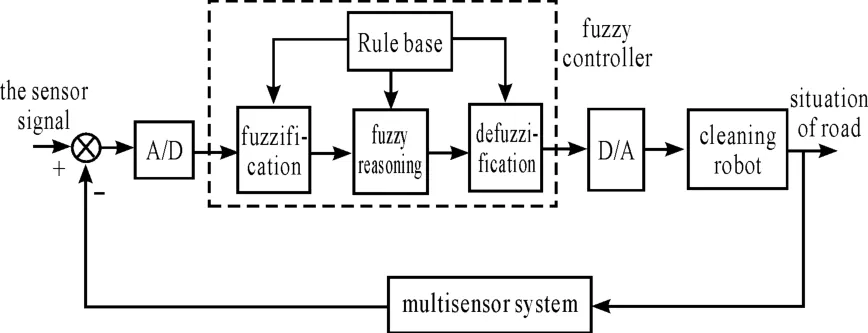
Figure 2.Construction diagram of the fuzzy controller of cleaning robot
Control algorithm is of vital importance in the design of fuzzy controller.The obstacle avoidance fuzzy controller is designed for the system of five inputs and three outputs in this paper.The five inputs include the distance of front-left obstacle,front-right obstacle,left obstacle,right obstacle,below obstacle.Corresponding to the above five groups of sensors respectively,the input values choose the smaller of the values from two sensors in each group.The three outputs as follows,the speed of left wheel and the right wheel,the length that suction metal rod scale.
We set the obstacle distance fields to[0 m,2 m]for reducing the calculation,the front-left,front-right,left and right obstacle distance unified into two file:{near,far},the corresponding interval as follows,[0 m,0.5 m],[0.5 m,2 m].The distance universe below the obstacle is[0 m,1.5 m],the liquid obstacle distance can be divided into two:{near,far},the corresponding interval as follows,[0 m,0.4 m],[0.4 m,1.5 m].The speed universe of left and right wheel is[0 m/s,1 m/s],the speeds of left and right wheel are divided into two parts:[missile,fast],the corresponding interval as follows,[0 m/s,0.1 m/s],[0.1 m/s,1 m/s]. Length domain that metal rod extended is[-0.8 dm,0.8 dm],the interval is[0.8 dm,0 dm],[0 dm,0.8 dm],corresponding trapezoidal membership function is shown in Figure 3.
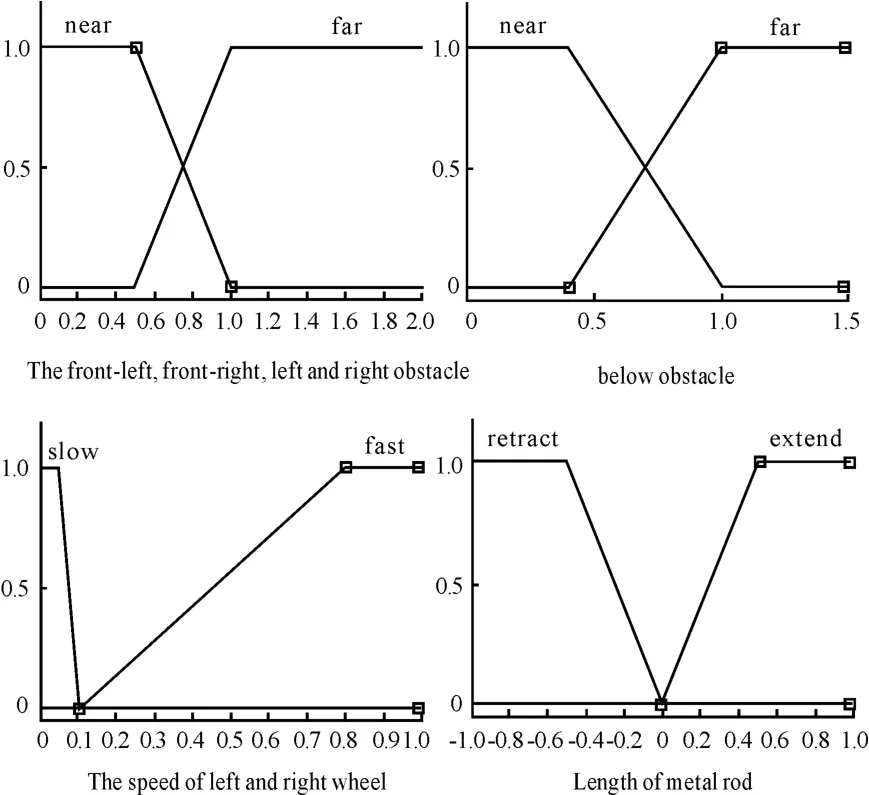
Figure 3.Input and output membership function of fuzzy variables
According to the human life and ways of thinking generalizations out fuzzy rules below:
If the front-left obstacles are near,front-right obstacles are far,the cleaning robot turns right;
If the front-left obstacles are far,front-right obstacles are near,the cleaning robot turn left;
If the front-left obstacles are far,front-right obstacles are far,the cleaning robot forward;
If the front-left obstacles are near,front-right obstacles are near,left obstacles are near,right obstacles are far,the cleaning robot turn right;
If the front-left obstacles are near,front-right obstacles are near,left obstacles are far,right obstacles are near,the cleaning robot turn left;
If the front-left obstacles are near,front-right obstacles are near,left obstacles are near,right obstacles are near,the cleaning robot turn right;
If the front-left obstacles are near,front-right obstacles are near,left obstacles are far,right obstacles are far,the cleaning robot turn right;
If the distance under the obstacles is near,cleaning robot extend metal rod;
If the distance under the obstacles is far,cleaning robot retract metal rod;
Robot peripheral obstacle distance is the factor influencing the cleaning robot to swerve.We set cleaning robot rotation about 45 degrees every time. Speeds of the left and right wheel decide direction of rotation.Liquid barrier on the ground is the decisive factor for affecting the metal rod.Cleaning robot detects obstacle distance by five groups of sensors,combining with the fuzzy controller,which can realize clean robot obstacle avoidance.
4.The simulation experiment
In order to validate the control effect of fuzzy controller,we carry on the simulation experiment using the MATLAB fuzzy control toolbox and SIMULINK module[7-8],and contrast waveform figure before and after joining fuzzy control.
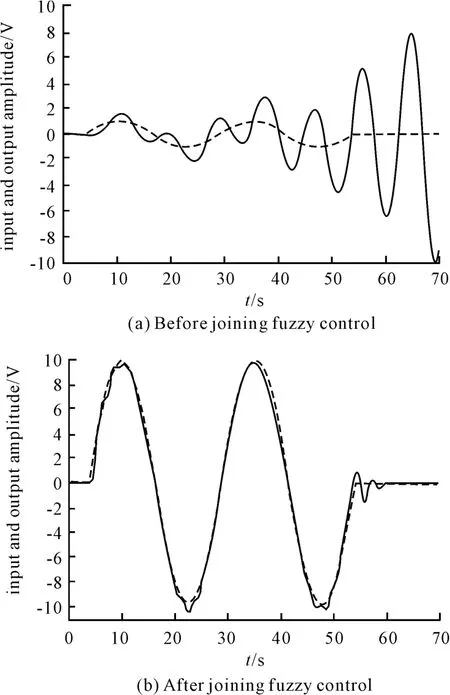
Figure 4.The waveform figure of the simulation experiment
The red line represents the analog signals thatneed to track in Figure 4,the blue line on the left represents the simulation output value after joining fuzzy control,the blue line on the right represents the simulation output value after removing fuzzy control. By comparing the fuzzy controller,we can reach the effect of stable obstacle avoidance in this paper.
5.Conclusion
This paper puts forward comprehensive obstacle avoidance scheme for a liquid and solid obstacles,then discusses structural model of the cleaning robot,focusing on the design of the fuzzy controller,finally verify the control effect of fuzzy control using simulation experiments.The results show that the scheme is feasible.
[1] CHEN Huazhi,XIE Cunxi.Fuzzy Control for Mobile Robot Obstacle Avoidance[J].Machine Tool and Hydraulic,2004,11:77-78.
[2] ZHI Gongshan,ZHANG Minfeng.The Research for Mobile Robot Obstacle Avoidance Algorithm[J].Science Times,2010,7:72-73.
[3] HUANG Xianwei,TONG Huai,CHEN Deyan.Mobile Robot Obstacle Avoidance System based on Embedded Linux Multi-sensor Fusion[J].Mechanical Design and Production,2013,3:155-158.
[4] REN Yanan,JIA Ruiqing,HE Jintian,et al.Research for Mobile Robot Obstacle Avoidance System based on Ultrasonic Sensor[J].Chinese Test,2012,20(3):76 -79.
[5] YANG Dongyong,XU Keli.The Mobile Robot Obstacle Avoidance based on Multi-sensor[J].Application of Computer System,2009,10,164-166.
[6] WANG Zhixin.Research for Some Problems of Intelligent Fuzzy Control[M].Beijing:Intellectual Property Publishing House,2009.
[7] LI Guoyong.Intelligent Predictive Control and MATLAB[M].Beijing:Electronic Industry Publishing House,2010.
[8] ZHEN Aqi,CAO Ge.MATLAB Practical Tutorial[M]. Beijing:Electronic Industry Publishing House,2007.
基于模糊控制的清潔機器人避障系統
張建龍?,劉曉玉,李立華
武漢科技大學信息學院,武漢 430081
針對清潔機器人提出了一種全方位避障方案,在傳統路面環境固體障礙物的基礎上加入對路面液體障礙物的處理,設計模糊控制器,通過5組傳感器檢測到的環境信息,避開左前方、右前方、左右側固體障礙物,清除路面液體障礙物,以達到全方位避障效果。經過MATALAB仿真實驗,效果已得到驗證。
清潔機器人;模糊控制;避障
TP242.6
10.3969/j.issn.1001-3881.2014.18.019
2014-05-01
?Jian-long ZHANG,E-mail:407816053@qq.com
猜你喜歡
中老年保健(2021年12期)2021-11-30 02:58:01
好日子(2021年8期)2021-11-04 09:02:46
小學生學習指導(爆笑校園)(2020年6期)2020-07-03 10:01:10
攝影之友(影像視覺)(2019年2期)2019-03-05 08:27:14
攝影之友(影像視覺)(2018年12期)2019-01-28 09:01:02
攝影之友(影像視覺)(2018年12期)2019-01-28 09:01:02
中華詩詞(2018年11期)2018-03-26 06:41:34
小學生學習指導(低年級)(2017年11期)2017-10-23 01:32:36
Coco薇(2016年8期)2016-10-09 02:11:50
中國醫藥科學(2015年19期)2015-02-27 12:33:11

- 機床與液壓的其它文章
- Design and application of attitude measuring device for DC power output filter circuit
- Developing deburring device based on burr formation principles*
- Experimental study on milling tool life for SKD11 steel and optimization of cutting parameters*
- Application research on three-phase inverter with space-vector pulse modulation*
- Glowworm swarm optimization algorithm merging simulated annealing strategy*
- Implementation of wireless communication and real time control for CNC system of embedded CNC turret punch press*