基于BIT位修正與數據疊加的快速捕獲算法*
2014-06-03 09:15:58黃夏妹
電子技術應用 2014年4期
關鍵詞:信號
胡 輝,路 春,黃夏妹
(1.華東交通大學 信息工程學院,江西 南昌330013;2.湖北工業大學 理學院,湖北 武漢434007)
近年來,在弱信號環境下(城市或建筑物內)提供精確定位的需求逐漸增長,全球衛星導航系統的發展也越來越受到關注,同時應美國聯邦通信委員會(FCC)提出的E-911計劃以及歐洲E-112緊急呼叫定位要求,精確的定位技術應該能被運用于城市峽谷和建筑物內。高靈敏度接收機的核心問題在于信號捕獲階段,故而研究在微弱環境下仍能精確捕獲信號的算法是實現接收機定位的前提。為了提高信號捕獲靈敏度,通常條件下要通過提高預檢積分時間來提高處理增益,然而積分時間會受到其他一些因素的制約,例如:發射衛星與接收機之間的多普勒、用戶接收機的動態、bit數據位周期以及接收機時鐘穩定度等[1]。其中導航比特跳變限制積分周期,這個限制影響了可捕獲的信號水平。因此通過分析數據位跳變產生的影響,研究抑制數據位跳變的影響的算法成為關鍵。
2010年,SUN K提出了兩步差分相干捕獲策略,過程比較繁瑣,運算量增加[2]。2011年,JEON S提出一種適用于解決GNSS信號數據位跳變問題的方法,該方法通過利用兩個捕獲支路互補的方式來實現捕獲,但運算量是常規處理算法的兩倍[3]。2013年本文作者只針對L2CM快速算法進行了分析,運算量雖然有一定的節省,但是仍然需要改進[4]。至此看來,數據bit位限制了預檢積分時間長度,為了提高捕獲靈敏度,將預檢積分時間延長又在所難免,在當前復雜的運算量下如果繼續利用提高運算量的方式解決數據位跳變問題,無疑是雪上加霜。在這種情況下,本文提出了一種通過利用本地bit修正函數來進行數據位修正,解決數據位跳變的同時,利用數據疊加預處理的方式降低捕獲運算量,從而在保證靈敏度的基礎上減少捕獲處理運算量的算法。
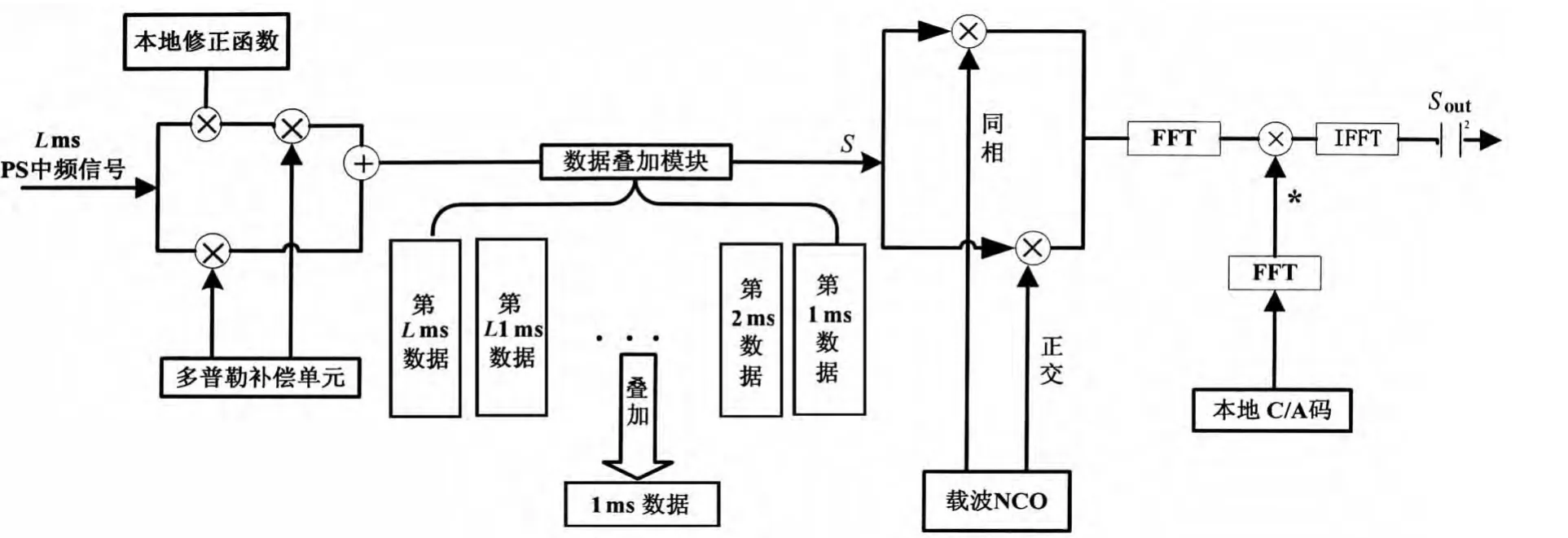
圖1 基于BIT位修正與數據疊加的快速捕獲算法原理框圖
1 算法的原理及分析
該算法中首先將輸入信號進行預處理操作,其中本地修正符號為sgn函數,然后經過多普勒補償單元后進行數據模塊的疊加操作,最后進行信號剝離。具體原理如圖1所示。
1.1 算法原理
假設第k顆衛星的輸入信號進行采樣后的信號表達式如下:

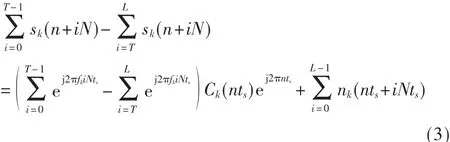
式中,Ak表示信號幅度,Dk表示數據比特,Ck表示偽隨機碼,ts是采樣周期,fk是實際的載波頻率,nk(nts)是高斯白噪聲。由于數據比特率為50 b/s,其周期為20 ms,故在20 ms內輸入信號發生bit跳變的位置是任意的,假設此時Di(t)在T處發生跳變,TD表示輸入信號長度,并有T∈[0,TD],故有Di(t≤T)=-Di(T≤t≤TD),而偽碼比特Ck是周期為1 ms的函數,于是有:

由偽隨機碼的周期性可知,在每個數據塊兒對應的位置偽碼比特數值是不變的,將N個數據長度的信號相對應的位置進行累加處理,此時Di(t≤T)=-Di(T≤t≤TD)=1,算法處理過程如下:
將未修正的增益函數定義為式(4):

若載波項能夠取得整數值,即fk滿足fkNTs為一個整數時,因為NTs=1 ms,所以fk需要是 1 kHz的整數倍,也就是在本地加入多普勒補償單元,計算可得:|A1(L,fk)|=|2T-L|,當無數據位跳變時,取到最大值L,此時|A1(L,fk)|=L,若在輸入數據中間發生跳變時,此時|A1(L,fk)|=0,該算法不能達到使信號累加提高信噪比實現弱信號捕獲的目的,甚至無法完成常規水平下的捕獲。針對此問題,算法中通過加入修正函數,如圖1所示,本地修正函數表達式為:

通過在本地輸入信號中加入修正來抑制跳變發生時增益函數衰減的問題,此時修正疊加的過程如下:
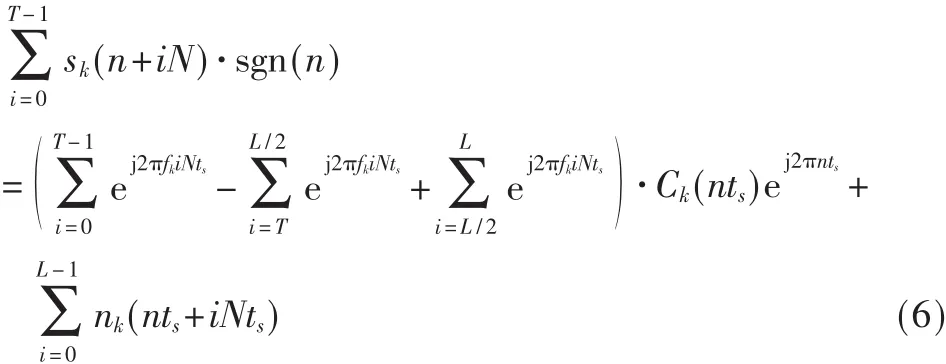

同理在使得增益函數A2(L,fk)取得整數最大值的同時,修正后的增益函數取得整數值|A2(L,fk)|=|2T|,將修正與未修正的兩路疊加,修正增益函數|A(L,fk)|≈|A1(L,fk)|+|A2(L,fk)|=L,故修正后的增益函數無論有沒有數據位跳變,在進行預處理疊加后,均可以取得最大的增益,且此時經過預處理的信號如下:

令修正后的函數為:
為了使fk滿足fkNts為一個整數,且為 1 kHz的整數倍,通過本地加入多普勒補償單元fk(n)=ej2πΔfkiNts,使得fk-Δfk滿足條件即可。故在(0~1 kHz)范圍內,通過不斷地調整本地載波,不斷接近于增益函數的最大值,此時將修正后的增益函數與未修正的增益函數進行對比如圖2所示。
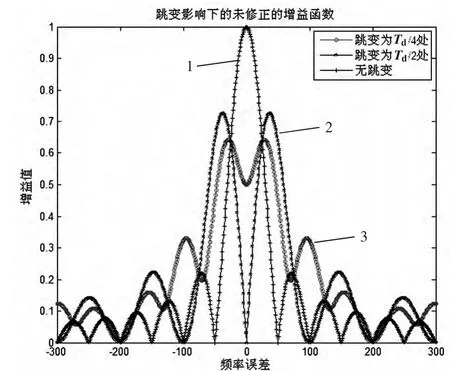
圖2 數據位跳變條件下未修正的增益函數
圖2為未修正的增益函數在不同位置發生數據位跳變時的結果,線1表示未發生跳變,線2表示跳變位置為Td/2,線3表示跳變位置為Td/4。從圖中可以看出,隨著跳變位置的不同,增益函數會發生裂變現象,出現雙峰現象,當數據在半周期處發生跳變時,此時裂變現象最嚴重,故數據位跳變會導致捕獲不到正確多普勒結果。圖3表示修正后的增益函數,線1表示無跳變或者跳變位置為Td/2的增益函數,線2表示跳變位置為Td/4,從圖中可以看處修正后的增益函數,能夠保持良好的單峰性,在峰值最大點可取得增益函數的最大值,故從理論分析證明,修正后的增益函數可以有效的克服數據位跳變現象,完成信號捕獲。
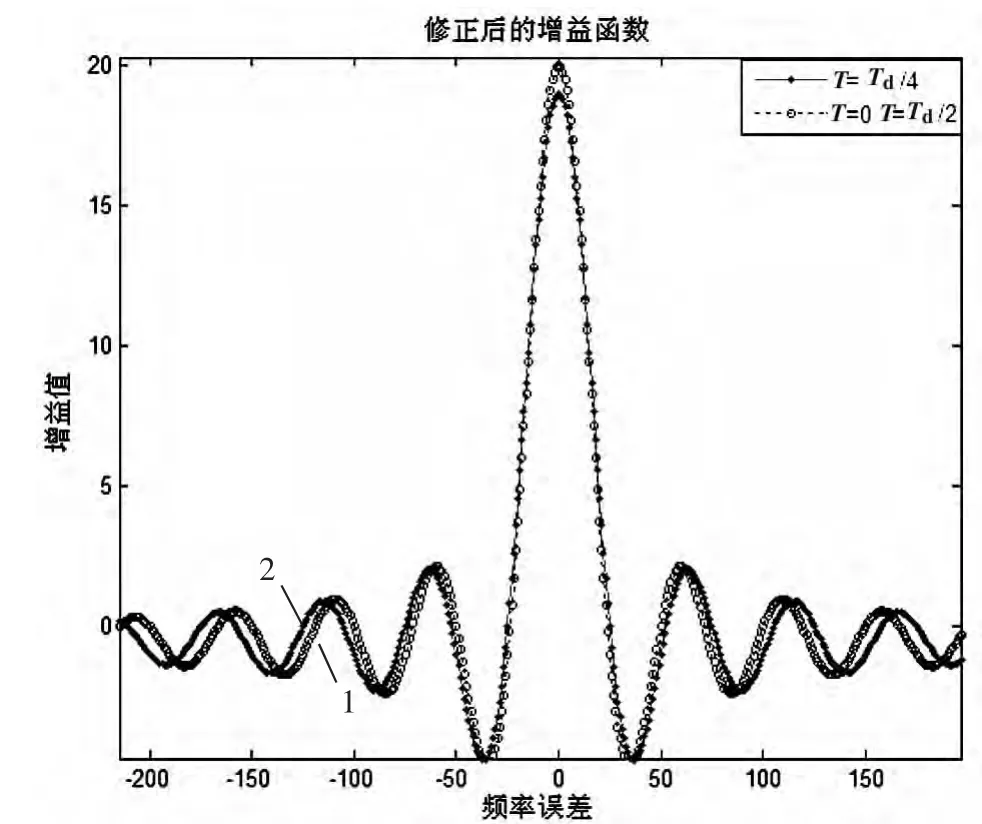
圖3 數據位跳變條件下修正后的增益函數
1.2 算法性能分析
由式(8)可知,完成預處理后的信號假定為S,將S進行載波剝離與碼剝離后,得到的檢測量假設為Sout,此時檢測量公式如下:

假設原始輸入信號長度為Lms,將輸入信號噪聲定義為高斯白噪聲nk(nts)·N(0,σ2),此時的信號經過 bit數據位修正、多普勒補償以及疊加處理為1 ms數據后,此過程由抽樣定理可以知道,L個隨機變量均屬于同一個樣本函數,且不同時刻的隨機變量具有獨立同分布的性質,故原始信號被放大了L倍,而噪聲經過累加后w(t)·N(0,Lσ2),此時信號的信噪比提高了10logL。由奈曼皮爾遜準則,其中p(Sout|H0)服從中心卡方分布,概率密度函數如下所示:

另外p(Sout|H1)服從非中心卡方分布,概率密度函數如下:

設定Pfa=10-3時,其中自由度n=2,s為隨機變量,σ為噪聲方差,在分析中歸一化為1,u為檢測量的均值,I0(·u/σ2)表示零階修正貝塞爾函數,Γ 函數如下定義:

選取 10 ms、15 ms、20 ms不同的積分時間條件下算法的性能進行比較。在虛警概率Pfa=10-3條件下,檢測概率以99%為標準前提下,分別所能達到的靈敏度依次為-26 dB、-27 dB、-29 dB,故靈敏度隨著積分時間的增長而提高。
1.3 算法運算量分析
為了體現算法運算量的優勢,實驗條件采取如表1所示幾種方法,設置實驗條件如下。采樣率為8.192 MHz,截取接收信號為M相干捕獲時間(M=20);則接收信號采樣后為8 192M點,本地碼周期為1 ms,為8 192點,對于信號壓縮算法N1為1 024。Nsat為衛星數目 32,多普勒范圍為±5 kHz,搜索步進為 500 Hz,Nf為頻點數 21,為新算法相位補償的頻點數 40,精細多普勒搜索頻點數11。
假設實數乘法和實數加法的計算時間都為t,此時新算法的運算量為739 794 183t,延遲相乘算法的運算量為2 830 029 686t,信號壓縮算法的運算量為3 451 271 532t,非相干捕獲算法的運算量為7 013 494 068t,FFT并行碼搜索算法的運算量為9 162 154 473t。該算法運算量分別是上述快速捕獲的 26.1%、21.4%、10.5%、8.07%, 具有很大的優勢。
2 算法仿真結果
實驗中利用多星座導航信號模擬器GNS800提供數據來源,設定接收機處于靜止狀態的條件下,模擬產生12通道 GPS射頻信號,其載噪比(S/N)從-19 dB~-35 dB,以-1 dB為步進遞減。利用SAS6812C-多模衛星導航系統中頻信號采樣器,以銣鐘FE-5680A作為時鐘,采樣頻率為5.714 MHz。多普勒頻率范圍為±5 kHz,預檢積分時間為 20 ms,頻率補償步進為 25 Hz,范圍為 0~1 kHz,捕獲搜索步進為1 kHz,共有11個頻點。此時最終的捕獲結果如圖4所示。
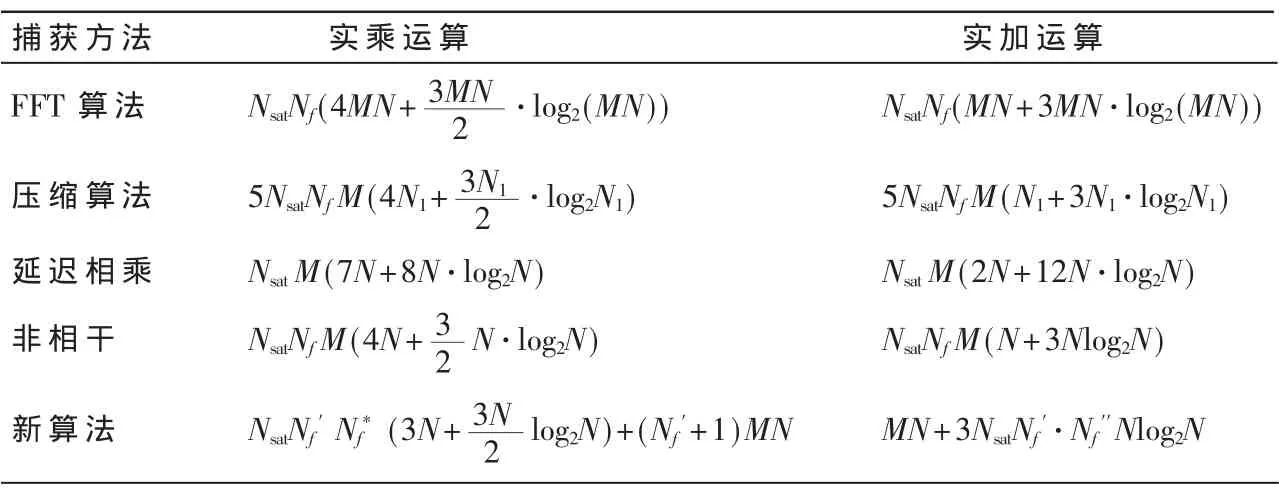
表1 新算法與不同算法之間的運算量對比分析
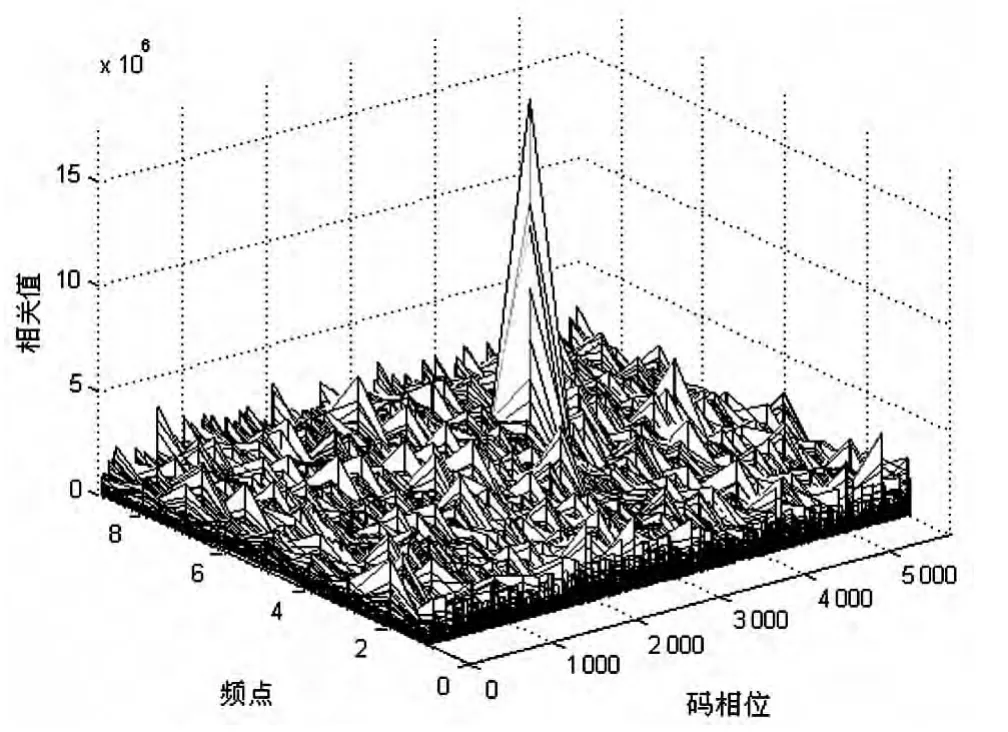
圖4 輸入信號SNR=-29 dB條件下捕獲結果圖
圖4表示在上述實驗條件下的仿真結果,捕獲到第5號衛星,碼相位為第3 630個采樣點,多普勒為1 850 Hz,最大相關峰為1.763×107,峰峰比值 3.67,捕獲結果中有很明顯的峰值,故能夠成功捕獲輸入信號,此結果與理論上的性能分析結果是吻合的。
由于在微弱環境條件下實現衛星信號的捕獲,通常需要延長預檢積分時間來實現,但是預檢積分時間的選取會受到導航數據位跳變的影響而且所需要的運算量過大,針對此問題本文進行了研究,提出的新算法能夠有效地消除導航數據位跳變的影響,對算法性能分析結果顯示該算法在積分時間增長條件下檢測概率提高,而所需運算量相比于其他算法而言是最小的。同時,最終實驗結果表明,該算法能夠成功捕獲衛星信號。該算法在信號捕獲算法中具有一定的意義與使用價值。
[1]MEZENTSEV O,LU Y,LACHAPELLE G,et al.Vehicular navigation in urban canyons using a high sensitivity GPS receiver augmented with a low cost rate gyro[C].ION GPS.2002,2002:24-26.
[2]SUN K,LETIZIA L P.A differential post detection technique for two steps GNSS signal acquisition algorithm[C].IEEE Plans 2010,Indian Welles,Catifornia USA,2010:757-764.
[3]JESON S,SO H,KIM G,et al.Bit transition cancellation signal acquisition method for modernized GPS and galileo signal[C].Proceedings of the 24th International Technical Meeting of The Satellite Division of the Institute of Navigation(ION GNSS 2011).2001:1028.
[4]胡輝,路春,吳超,等.基于 XFAST技術的 L2CM信號快速捕獲算法研究[J].電子技術應用,2013,11(39):118-121.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06