基于數學形態學和顏色特征的車牌定位方法
2014-06-01 09:31:12徐艷蕾
圖學學報 2014年5期
關鍵詞:數學
廉 寧, 徐艷蕾
(吉林農業大學信息技術學院,吉林 長春 130118)
基于數學形態學和顏色特征的車牌定位方法
廉 寧, 徐艷蕾
(吉林農業大學信息技術學院,吉林 長春 130118)
為了解決單一車牌定位算法在復雜背景中定位效果不理想的現狀,提出一種數學形態學和顏色特征相結合的算法對車牌進行定位。首先利用最大類間方差法(Ostu算法)找到一個最佳的閾值,根據所得閾值把得到的灰度圖像二值化,然后采用一種改進的數學形態學算法對圖像進行邊緣檢測,最終結合數學形態學和車牌顏色特征進行準確定位。實驗表明該算法明顯優于傳統或單一的車牌定位方法,定位準確率高,對背景限制少,應用范圍廣。
車牌定位;最大類間方差法;圖像二值化;數學形態學;顏色特征
隨著社會經濟的迅猛發展,人們生活水平的提高,機動車輛的數量越來越多。作為汽車“身份證”的汽車車牌是在公共場合能夠唯一確定汽車身份的憑證。車輛牌照定位與識別已成為計算機視覺與模式識別技術在智能交通領域應用的重要研究課題之一,而車牌定位是車牌識別系統的重要前提。
常用的車牌定位方法主要分為基于灰色圖像和基于彩色圖像的車牌定位方法。但因車牌自身因素(新舊、污漬、傾斜)及環境因素(光照、天氣),基于灰度圖像的定位算法存在一定的缺陷[1-2]。基于彩色圖像的車牌定位算法主要是考慮到彩色圖像具有豐富的信息,但是這類算法的過程比較復
雜[3-4]。近年來,形態學圖像處理這門特殊的學科已經發展成為圖像處理的一個主要研究領域,而且國內外很多學者已經將其應用到車牌識別[5-6]。本文綜合考慮數學形態學和車牌本身的顏色特征,提出一種數學形態學和顏色特征相結合的精確車牌定位方法。本算法克服了單一算法識別率低的缺點,定位準確性高,對不同光照程度和車牌傾斜的情況不敏感,且能在復雜背景下準確定位,有很強的適應性和廣泛的應用性,同時,定位分割的時間也能滿足實際應用的需求。
1 圖像預處理
1.1 圖像灰度化
從圖像采集器中得到的RGB彩色圖像不利于圖像處理,為了提高系統的實時處理性能,對彩色圖像進行灰度轉換。本文采用加權平均法按式(1)對RGB三分量進行加權平均得到合理的灰度圖像IG。

1.2 Ostu算法二值化
將得到的彩色圖像轉換為灰度圖像后,為了方便后面的處理,還需要把灰度圖像轉換為二值圖像。本文選擇目前最優的全局門限方法——Ostu算法(又稱最大類間方差法)。使用Ostu算法進行閾值分割,不論圖像的直方圖有無明顯的雙峰,都能得到較為滿意的結果。基本思想是:將直方圖在某一閾值處分割成兩組,其中一組對應背景部分,另外一組對應于前景部分,當被分成的兩組的組內方差最小,組間方差最大時,確定閾值。
假定圖像灰度級為L,灰度級為i的像素點數為ni,則圖像的全部像素數為:

第i個灰度級的概率Pi為:

設灰度門限值為K,則圖像像素按照灰度級可分為兩類,即M0和M1,灰度等級范圍分別為[1,2,···,k]和[k+1,···,L]。因此,M0和 M1的出現概率分別用w0,w1表示。且有:

圖像總像素、M0像素的平均灰度級可分別表示為:

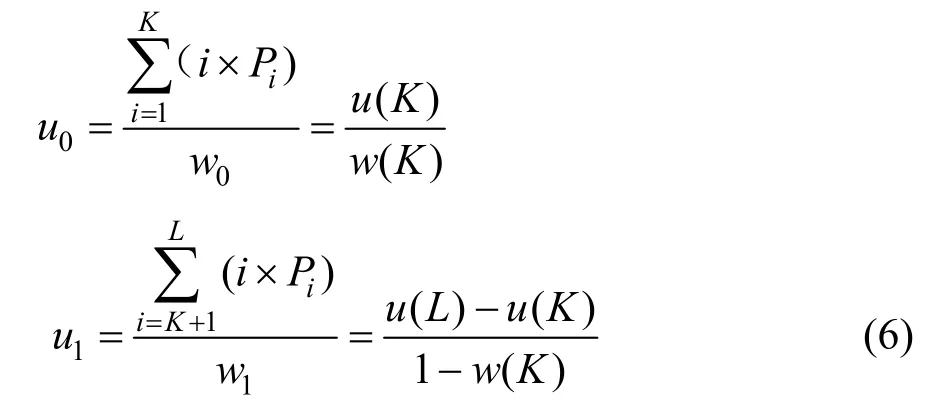
M0和M1像素的均值分別由u0和u1表示:
圖像總的均值可化為:

M0和M1的間類方差為:

因此可以得到關于K值的函數:

K值為該方差最大的值。方差反映的是一個變量對應一組數值的均衡性的大小,方差越大說明其均衡性越低;反之,均衡性就越高。對于一幅圖像而言,可以分為背景和目標兩部分,在目標和背景的臨界點上,灰度的變化最大,此時的灰度值為最佳閾值。
運用 Ostu算法求出灰度圖像背景與目標的閾值設為T,從最小灰度值到最大灰度值遍歷T,當T使得間類方差最大時,T即為分割的最佳閾值。然后利用這個閾值二值化灰度圖像。即有:

原始圖和二值化后的效果圖分別如圖1和圖2所示。

圖1 原始圖
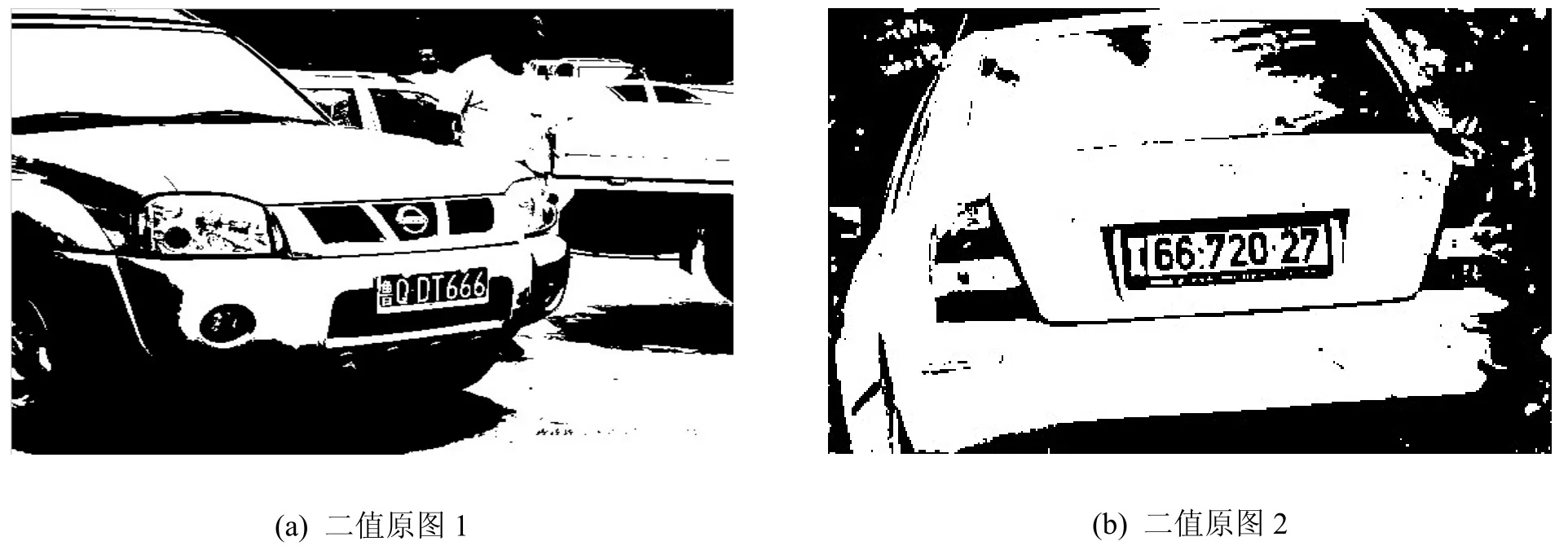
圖2 二值化后效果圖
2 基于改進的數學形態學邊緣檢測算法
常用的邊緣檢測算子有Robert算子、Sobel算子、Prewitt算子以及Canny算子,而數學形態學也是提取圖像分量的一種工具,對于圖像邊緣檢測有很好的效果[7]。本文采用一種改進的數學形態學算法對二值圖像進行邊緣檢測,實驗結果顯示效果明顯優于傳統的邊緣檢測算子。
數學形態學的基本運算有4個:膨脹、腐蝕、開啟和閉合。
圖像集合A用結構元素B來膨脹,記作Α Β⊕ ,其定義為:其中,Φ為空集,B為結構元素。
A被B的形態開運算是先腐蝕后再用B來膨脹腐蝕結果。表示為:
數學形態學提供了基本的邊緣檢測方法:集合A的邊界記為β(A),設B是一個合適的結構元素,首先令A被B腐蝕,然后使集合A與腐蝕后的圖像作差,即同理:也可以用來表示圖像邊緣。
由于結構元素的靈活性,用單一的結構元素進行一次運算[8],不能保證得到理想的效果。因此,本文采用了一種改進的數學形態學算法進行邊緣檢測。基本思想為:利用一個3×3或5×5的結構元素模板對二值圖像進行膨脹,用膨脹后的圖像減去原二值圖像,結果記為A1,再用原二值圖像減去腐蝕后的圖像,結果記為A2,然后用膨脹后的圖像與腐蝕后的圖像做差,結果記為A3,最終取A1、A2、A3的平均值作為本文的邊緣圖像結果。即:

各種邊緣檢測算法效果對比圖如圖3所示。
圖3中(a1),(b1);(a2),(b2);(a3),(b3);(a4),(b4)分別為使用Robert算子、Sobel算子、數學形態學和本文改進算法得到的邊緣圖像。從兩組對比圖中可以看出Robert算子對噪聲較敏感,圖像中出現了孤立點;Sobel算子容易漏檢,且不連續;數學形態學算法效果相對較好,但邊緣細節不豐富;本文改進的邊緣檢測算法保留了完整的圖像邊緣,并去掉了一些虛假邊緣,而且檢測到的邊緣連續平滑,輪廓清晰,更有利于下一步的車牌定位。
3 車牌定位
3.1 車牌粗定位
在車牌定位中為減少定位的復雜程度,首先要對包含有車牌的區域進行粗定位。本文將得到的邊緣圖像進行閉運算與開運算使牌照區域連通,得到牌照的候選區域。用數學形態學[9]進行車牌粗定位的過程如下:
(1) 對得到的邊緣圖像進行閉運算[10-11]。閉運算一般會將狹窄的缺口連接起來,平滑處理對象的輪廓,并填充比結構元素小的洞。結構元素的選取和處理圖像相關,車牌區域的形狀是長方形的,所以選取方形的結構元素來對車牌進行閉運算。處理結果如圖4(a)和4(b)左側圖所示。
(2) 對圖像進行開運算。從圖4(a)和4(b)中左側圖可以看出,經閉運算之后,圖像的部分相鄰的邊緣連接到了一起,形成了一個連通區域[12]。但是在車牌區域連通的同時,一些無關的背景影響因素也連通到了一起,因此還需要進行開運算,同樣選擇長方形結構元。效果圖如圖4(a)和4(b)右側圖所示。
(3) 移去小對象。經過對圖像進行閉運算和開運算之后,從圖4可以看出,得到了多個連通區域,這對車牌的精確定位有很大的干擾,從車牌總像素角度考慮,可以運用MATLAB中的bwareaopen函數去除圖像中的小對象[13]。車牌的具體像素與拍攝的實際距離等有關系,本文經過試驗,得到像素閾值為2000。效果如圖5所示。
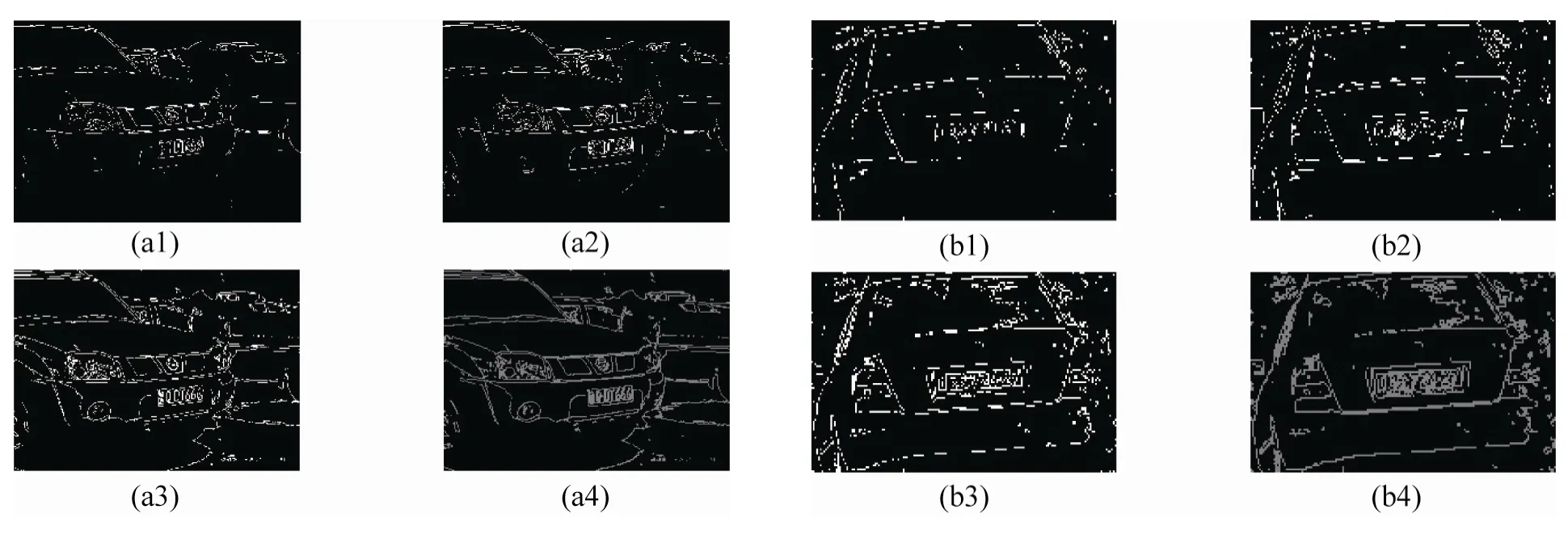
圖3 各種邊緣檢測算法效果對比圖
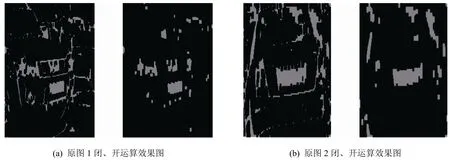
圖4 閉、開運算后的結果
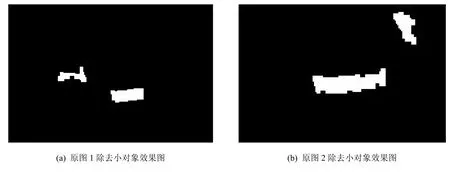
圖5 除去小對象后的結果
3.2 車牌精準定位
車牌粗定位過程可縮小車牌定位的范圍,但是仍然包含多余候選區域,留有多余的干擾信息,為了得到準確的車牌定位,本文利用車牌的彩色信息進行進一步分割,由此得到準確的車牌區域。
根據車牌底色等有關的先驗知識,可知車牌底色有藍、黑、黃和白底色的軍車和武警車牌照等。彩色像素點統計的方法可以分割出合理的車牌區域。因為每種車牌底色顏色的RGB有一定的范圍,從而可以確定車牌底色藍色(黃色、黑色)RGB對應的各自灰度范圍,然后統計行方向在此顏色范圍內的像素點數量,設定合理的閾值,也就是取兩個波谷的區域為邊界,則可以確定車牌在行方向的區域。然后,在分割出的行區域內,用相同的方法統計列方向車牌底色像素點的數量,最終確定完整的車牌區域。

圖6 車牌定位實驗結果
從圖6中可以看出,對于稍有傾斜、復雜背景下的汽車牌照或非常見藍底色的牌照,本文方法都能準確定位;而對于上述復雜情況,單一算法有一定的局限性,不能準確定位,從而對后續的車牌分割與字符識別造成很大的影響。進一步證明了本算法的準確性。
4 實驗結果與分析
為了驗證本文算法的有效性,基于以上算法分析,在MATLABR2008a實驗平臺下,對隨機采集的130張真彩色車牌圖像進行實驗分析,這些圖像包括不同的光照條件(晴天、陰天、白天和傍晚有燈光的情況下),不同的汽車顏色(灰、白、紅、黑等),不同的車牌底色(藍、黃、白、黑等),不同車型(轎車、面包車、貨車等)的車輛。如果只使用數學形態學對所采集的圖像進行定位,正確識別的車牌圖形為106幅,而通過文中數學形態學與顏色特征相結合的定位方法,準確定位123張,與單一數學形態學方法相比較提高了13.1%。
對實驗結果進行分析可得到不同光照條件下:①相同條件(車型、車牌、拍攝角度、天氣陰晴)下,白天對比傍晚(有燈光),白天的定位效果比傍晚好;②同一時間相同條件(車型、車牌、拍攝角度)下,晴天對比陰天,晴天的定位準確率高。可知,不同光照條件對定位效果是有影響的。同時,針對比較傾斜的原始圖像,文中算法也可以得到準確定位,所以,本算法適用范圍較廣。
5 結 論
車牌定位是車牌自動識別中的重要一步,直接影響到車牌自動識別的準確率。本文結合數學形態學和車牌本身的顏色特征對車牌進行準確定位,從實驗結果和數據分析可以看出,本文算法定位準確性高,對車牌背景、光線和車牌傾斜等不利因素限制性較少,定位的時間也完全能達到實際應用的要求,有較好的通用性,并且本文算法對于圖像分割方法的研究也有很大的借鑒意義。
[1] 王 枚, 蘇光大, 王國宏. 復雜環境下的車牌定位及目標真實性驗證[J]. 光學精密工程, 2009, 17(4): 886-894.
[2] 張浩鵬, 王宗義. 基于灰度方差和邊緣密度的車牌定位算法[J]. 儀器儀表學報, 2011, 32(5): 1095-1102.
[3] 張 引, 潘云鶴. 彩色汽車圖像牌照定位新方法[J].中國圖象圖形學報, 2001, 6A(4): 374-377.
[4] 樊孝宏, 戚飛虎. 一種基于紋理和顏色綜合特征的車牌定位新方法[J]. 計算機工程, 2004, 30(13): 125-127.
[5] 王 怡. 基于數學形態學的車牌定位與分割[J]. 計算機應用與軟件, 2010, 27(8): 255-256.
[6] Ukani N, Mehta H. An accurate method for license plate localization using morphological operations and edge processing [J]. Image and Signal Processing, 2010, 5(12): 2488-2491.
[7] 李 剛, 曾銳利, 林 凌, 王蒙軍. 基于數學形態學的車牌定位算法[J]. 儀器儀表學報, 2007, 28(7): 1323-1327.
[8] 任明武. 數字圖像處理[M]. 南京: 南京理工大學出版社, 2003: 56-78.
[9] Han Xiao, Xu Chengyang, Prince J L. A topology preserving level set method for geometric deformable models [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2003, 25(6): 755-768.
[10] 陳恩慶, 李曉磊. 采用多結構元素模板的形態學邊緣檢測新算法[J]. 計算機工程與應用, 2013, 49(17): 146-149.
[11] 鄒福輝, 李忠科. 圖像邊緣檢測算法的對比分析[J].計算機應用, 2008, 28(5): 215-219.
[12] Rafael C G, Richard E W. 數字圖像處理[M]. 阮秋琦, 阮宇智, 譯. 北京: 電子工業出版社, 2005: 263-267.
[13] Caccia F, Marmot R, Lombardi L. License plate detection and character recognition [J]. Lecture Notes in Computer Science, 2009, (5716): 471-480.
Method of License Plate Location Based on Mathematical Morphology and Color Characteristics
Lian Ning, Xu Yanlei
(College of Information and Technology, Jilin Agriculture University, Changchun Jilin 130118, China)
In order to solve the problem that the situation of single license plate localization algorithm in complex background is not ideal. A license plate location algorithm based on mathematical morphology and color characteristics is proposed. Firstly, the new method uses Ostu algorithm to select an optimal threshold, and according to the threshold carries on binary processing, then by using a new method of mathematical morphology for image edge detection. Finally combined mathematical morphology with color characteristic to locate license plate. Experiments show that this new method with higher accuracy and fewer restrictions on background is superior to traditional or a single method and can be widely used.
license plate location; Ostu algorithm; image binarization; mathematical morphology; color characteristics
TP 317.4
A
2095-302X(2014)05-0774-06
2014-04-14;定稿日期:2014-05-22
廉 寧(1988–),女,山東德州人,碩士研究生。主要研究方向為數字圖像處理。E-mail:313048603@qq.com
徐艷蕾(1979–),女,河北正定人,副教授,博士。主要研究方向為圖像處理與傳輸、農業工程信息化。E-mail:yanleixu@163.com
猜你喜歡
中等數學(2021年4期)2021-12-04 13:57:52
中等數學(2021年7期)2021-12-03 04:01:41
中等數學(2021年1期)2021-12-02 03:08:08
中等數學(2021年3期)2021-12-02 00:28:14
中等數學(2020年11期)2020-12-18 01:23:21
學苑創造·A版(2019年5期)2019-06-17 01:14:21
新民周刊(2016年15期)2016-04-19 18:12:04
新民周刊(2016年15期)2016-04-19 15:47:52
傳奇故事(破繭成蝶)(2015年7期)2015-02-28 09:29:27
漫畫月刊·炫版(2014年3期)2014-05-27 04:17:21