主動結(jié)構(gòu)動力學特征與頻響特性研究
2014-05-25 00:34:03劉海標宋漢文
振動與沖擊 2014年22期
劉海標,宋漢文
(同濟大學航空航天與力學學院,上海 200092)
主動結(jié)構(gòu)動力學特征與頻響特性研究
劉海標,宋漢文
(同濟大學航空航天與力學學院,上海 200092)
對主動結(jié)構(gòu)動力學特征進行理論分析,從不同角度對其分類、討論代表性范例。分析主動結(jié)構(gòu)與非自伴隨結(jié)構(gòu)之關系。探討其頻域特性、闡述其與被動結(jié)構(gòu)頻響函數(shù)之關系。通過數(shù)值算例揭示主、被動結(jié)構(gòu)頻響函數(shù)間差異,展示仿真系統(tǒng)左右特征向量。通過實驗及數(shù)據(jù)處理,獲得由自由-自由梁構(gòu)造的主動結(jié)構(gòu)頻響函數(shù),驗證主動結(jié)構(gòu)的頻域特性。
主動結(jié)構(gòu);分類;頻率響應函數(shù);左特征向量
1 主動結(jié)構(gòu)基本概念
經(jīng)典結(jié)構(gòu)動力學主動(自動)控制領域研究已臻于成熟,并獲得廣泛應用及成果。以往主動控制研究目的大多基于減振降噪、使響應過程快速衰減或增加系統(tǒng)穩(wěn)定性意義下最優(yōu)控制律的構(gòu)造與實現(xiàn)。而對含控制結(jié)構(gòu),尤其對含未知控制律的結(jié)構(gòu)動力學特性研究尚少。在流固耦合、摩擦、轉(zhuǎn)子動力學、氣動彈性及伺服控制等多環(huán)境載荷激勵下涉及自激顫振研究中,其數(shù)學、力學模型與主動控制完全一致,但控制律非人工主動構(gòu)建、未知。基于此本文提出環(huán)境控制及主動結(jié)構(gòu)概念。本文將承受閉環(huán)控制載荷結(jié)構(gòu)稱主動結(jié)構(gòu);僅承受開環(huán)載荷結(jié)構(gòu)稱被動結(jié)構(gòu)。在被動結(jié)構(gòu)中系統(tǒng)動力學響應只依賴于初始條件及外界激勵,而通常外加系統(tǒng)激振力與系統(tǒng)運動無關。而在主動控制與自激振動系統(tǒng)中,激振力為系統(tǒng)動力學(位移、速度、加速度及應力應變等)的函數(shù)。
本文用三引例解釋主動結(jié)構(gòu)定義及閉環(huán)控制荷載的內(nèi)在機理。作用于橋梁主梁二維線狀節(jié)段構(gòu)件的氣動力[1]可表達為

式中:[M],[C],[K]分別為質(zhì)量、阻尼及剛度矩陣;{x}為位移矢量;{fb(t)},{fse(t)}分別為抖振力及自激氣動力。
自激力體現(xiàn)風與結(jié)構(gòu)的相互作用,進一步分解為與速度、位移相關部分,即

式中:[Cse],[Kse]為氣動阻尼、氣動剛度。
對轉(zhuǎn)子動力學中轉(zhuǎn)子-密封系統(tǒng)[2]有

考察切削機床[3],其結(jié)構(gòu)可簡化為單自由度系統(tǒng),設V為刀具切削速度,F(xiàn)c為主切削力,為速度V的函數(shù)。實際瞬時切削速度V=V0+x·,系統(tǒng)運動方程為
因方程右端載荷項表達式與左端一致,移項可得本文主動結(jié)構(gòu)動力學方程,即式(2)、(5)、(7)、(8)。
旋轉(zhuǎn)軸不穩(wěn)定運動、渦輪葉片顫振、液流所致管道振動、汽車轉(zhuǎn)向輪擺振及空氣動力所致橋振動以及流固耦合振動結(jié)構(gòu)、非保守力作用結(jié)構(gòu)等均為典型的自激振動,均可視為主動結(jié)構(gòu)。Preumont[4]認為主動結(jié)構(gòu)主要以智能材料在振動控制中應用為主。張景繪等[5]進行主動結(jié)構(gòu)的理論及實驗研究。Mirzaeifar等[6]為計算含不同特征值的主動結(jié)構(gòu)特征值及特征向量導數(shù)提出新方法。歐陽華江[7]對剛度矩陣非對稱的主動結(jié)構(gòu)特征根問題進行研究。Wyckaert等[8]討論分析振動聲學中非對稱模型方程與模態(tài)分析滿足的互易律之關聯(lián),并驗證模型的有效性。Adhikari[9]將經(jīng)典模態(tài)分析進行擴展,使之適用于非對稱非保守系統(tǒng)。將非保守系統(tǒng)左右特征向量用與之對應的保守系統(tǒng)左右特征向量線性組合表示,將伽遼金最小誤差方法與紐曼展開法結(jié)合,計算線性組合的復常量系數(shù)。Ouisse等[10]提出使復模態(tài)適應于非自伴隨系統(tǒng)方法,并用于辨識振動方程系數(shù)矩陣。
實際工程中造成主動結(jié)構(gòu)情況有兩種,即若閉環(huán)控制人為施加,如各種振動控制[11-12],稱為“主動控制”;若閉環(huán)載荷由工程因素引起,如橋梁風振[1,13-14]或機翼顫振[15](Flutter)、機床切削顫振(Chatter)[3]、航天器POGO振動[16]等各類自激振動,本文稱為“環(huán)境控制”。本文目的為研究基于非特定目的的主動控制行為,通過控制前后結(jié)構(gòu)動力學特性差異比較、跟蹤歸納,辨識來自環(huán)境控制的未知控制律。為自激振動的形成機理、參數(shù)辨識及其它原因?qū)е碌牟幻骺刂坡善谱g等研究提供支持。
在所有主動結(jié)構(gòu)中線性主動結(jié)構(gòu)為最簡單的理想系統(tǒng)。考察多自由度系統(tǒng)
由式(10b)知,施加于任意自由度的閉環(huán)控制力均可表達為所有測點位移、速度及加速度響應的線性組合。將獨立作動器連接到被控制測點,按設計要求將所得位移、速度、加速度響應進行線性組合,獲得激振力,即可實現(xiàn)該系統(tǒng)。將式(10a)代入式(9)得

2 主動結(jié)構(gòu)分類
2.1 按反饋響應信號分類
作用于結(jié)構(gòu)的反饋信號為位移、速度、加速度信號。位移反饋改變原系統(tǒng)剛度矩陣,速度、加速度反饋分別改變原系統(tǒng)的阻尼、質(zhì)量矩陣,不同反饋信號對應不同控制效果。
2.2 按控制點、反饋點幾何位置分類
對主動結(jié)構(gòu)而言,控制點、反饋點一致時稱同位主動結(jié)構(gòu);反之則稱非同位主動結(jié)構(gòu)。對同一被動結(jié)構(gòu),保持控制增益性質(zhì)及大小不變,控制位置與測量位置互換后組成的主動結(jié)構(gòu)與原主動結(jié)構(gòu)稱互為伴隨主動結(jié)構(gòu)。
2.3 按增益矩陣對稱性分類
主、被動結(jié)構(gòu)的重要區(qū)別在于振動方程中[M],[C],[K]矩陣是否保持對稱性及正定特性。由第二種分類方法看出,同位主動結(jié)構(gòu)不會改變[M],[C],[K]矩陣的對稱性,而非同位主動結(jié)構(gòu)則會改變。因此,可由[M],[C],[K]矩陣是否保持對稱性角度將主動結(jié)構(gòu)分為兩類,即①自伴隨(self-adjoint)主動結(jié)構(gòu),其[M],[C],[K]保持對稱性;②非自伴隨(non-selfadjoint)主動結(jié)構(gòu),其[M],[C],[K]對稱性被破壞。
2.4 典型主動結(jié)構(gòu)
本文以位移反饋控制為例,列舉典型主動結(jié)構(gòu),通過公式進一步明確分類的區(qū)別及聯(lián)系。
2.4.1 p點測量p點控制的原點控制模式
該控制等效于在原系統(tǒng)將p點質(zhì)量及地面間增加剛度為Spp的彈簧。若彈簧為物理可實現(xiàn)的,則該控制等同于結(jié)構(gòu)修改。若附加參數(shù)與原參數(shù)疊加后仍要求為負彈簧、負阻尼、負質(zhì)量時即為物理不可實現(xiàn)。在結(jié)構(gòu)動力學建模中不存在[M],[C],[K]矩陣主對角線元素為負的情形,即不能等同于結(jié)構(gòu)修改。
2.4.2 p點測量r點控制的跨點控制模式
考察測量點與控制點互換的對偶情形,從r點拾取位移信號作用于p點,即r點測量p點控制的跨點控制模式。
式(13)、(14)均為非同位主動結(jié)構(gòu)。由分析知,同位主動結(jié)構(gòu)不會改變[M],[C],[K]矩陣的對稱性,而非同位主動結(jié)構(gòu)則會改變。式(13)、(14)的反饋增益相同時Spr=Srp,即為互為伴隨主動結(jié)構(gòu)。
第2種模式下若刻意保持對稱性需進行組合控制。將式(13)、(14)的控制進行組合同時實現(xiàn),即

式(13)、(14)的控制相互獨立,則可構(gòu)造Spr=Srp,此時式(13)的控制點為式(14)的反饋點,而式(14)的控制點為式(13)的反饋點,且反饋作用大小相同。非同位主動控制也會使振動方程的[M],[C],[K]矩陣保持原對稱性。
控制作動器工作端均直接施加于受控點,另端(支撐端)為絕對地面,無法退化為結(jié)構(gòu)優(yōu)化。此時常需將作動器兩端均連接于結(jié)構(gòu)面,如桁架結(jié)構(gòu)將某根桿件換成可控伸縮的作動桿。設作動桿一端為p,另一端為r,形成主動二力桿,該其受控制后通過變形產(chǎn)生軸力施加于p,r兩點。設反饋源信號仍為位移響應,分別考察反饋源為兩端點xp(t),xr(t)及任意測點xk(t)情形(p≠r≠k)。
2.4.3 二力桿控制
二力桿無論受何種反饋因素控制其兩端支反力均等值反向。即fp(t)=-fr(t),設此時系統(tǒng)反饋信號由xp(t)提供,則有
設Srp=-Spp=s1,-Srp=Srr=s2,代入式(18),當且僅當s2=-s1=s時,式(18)可進一步化為

此時,作為作動器的主動二力桿退化為一個彈簧(等價于結(jié)構(gòu)優(yōu)化)。恢復力大小可由彈簧剛度及變形量s(xr(t)-xp(t))求得。
2.4.4 k點測量p點控制
無論受何種反饋因素控制,二力桿兩端p,r兩點支反力均為等值反向。即fr(t)=-fp(t),此時系統(tǒng)反饋信號由xk(t)提供,則有
以上述控制均為單點反饋情形。對多點反饋,多點控制為基本情況線性組合,不再贅述。
由分析知,①系統(tǒng)矩陣按對稱性破缺程度分為“可對角化”與“不可對角化”兩類,分別與單位矩陣及若當(Jordan)塊相似[17]。隨破缺程度增長,區(qū)分二者邊界即為自激顫振穩(wěn)定性喪失的臨界點,工程上對應風速、轉(zhuǎn)速或切削用量的臨界數(shù)值。一旦越過此點,系統(tǒng)動力學響應將發(fā)散,即對稱性破缺增長與系統(tǒng)穩(wěn)定性喪失程度正相關;②同位主動結(jié)構(gòu)只改變原被動結(jié)構(gòu)系數(shù)矩陣的主對角元素,不改變其對稱性,但可能改變矩陣的正定特性;③將伴隨主動控制律進行對偶疊加及改變系數(shù)矩陣的非對角元素,且改變量相同,不會改變系數(shù)矩陣對稱性。而實際工程中,刻意保持對稱性通常不能實現(xiàn)。
3 主動結(jié)構(gòu)頻域特征
主動結(jié)構(gòu)系數(shù)矩陣不再對稱,且需判定系統(tǒng)穩(wěn)定性。主動結(jié)構(gòu)系數(shù)矩陣非對稱性會破壞其頻響函數(shù)矩陣對稱性,使主動結(jié)構(gòu)左右特征向量產(chǎn)生差異。在主動結(jié)構(gòu)實驗模態(tài)分析與參數(shù)辨識領域,本文限于結(jié)構(gòu)穩(wěn)定區(qū)域內(nèi)進行研究。
多自由度離散系統(tǒng)的主動結(jié)構(gòu)中,構(gòu)成控制律模型要素包括:為作動器提供反饋信號的參考點位置與數(shù)量、作動器施加激勵點位置與數(shù)量、描述每個作動器輸入輸出關系的微分方程或傳遞函數(shù)模型及參數(shù)。時域方程(9)在r點測量p點控制情況下,主動結(jié)構(gòu)的頻域方程為
將上式中m,n互換,可知主動結(jié)構(gòu)頻響函數(shù)矩陣的對稱性已被破壞。令式(26)中m=r,n=p,式(31)可化為

4 數(shù)值算例與實驗
4.1 主動結(jié)構(gòu)數(shù)值仿真
構(gòu)建彈簧-質(zhì)量-阻尼系統(tǒng)剪圖1。
系統(tǒng)質(zhì)量、阻尼、剛度矩陣分別為

圖1 六自由度彈簧-質(zhì)量-阻尼系統(tǒng)Fig.1 Six degrees of freedom spring-mass-damper system
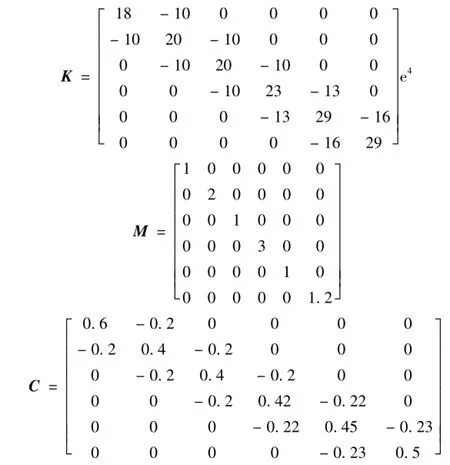
構(gòu)造控制律:由m5拾取位移信號,施加于m2,反饋增益為-60 000,形成主動結(jié)構(gòu)。對一般粘性阻尼系統(tǒng),其特征值、特征向量均為復數(shù)形式。仿真中被、主動結(jié)構(gòu)頻響H1-6與~H1-6的頻響幅值見圖2。主動結(jié)構(gòu)的頻響函數(shù)矩陣對稱位置頻響~H2-5,~H5-2見圖3。
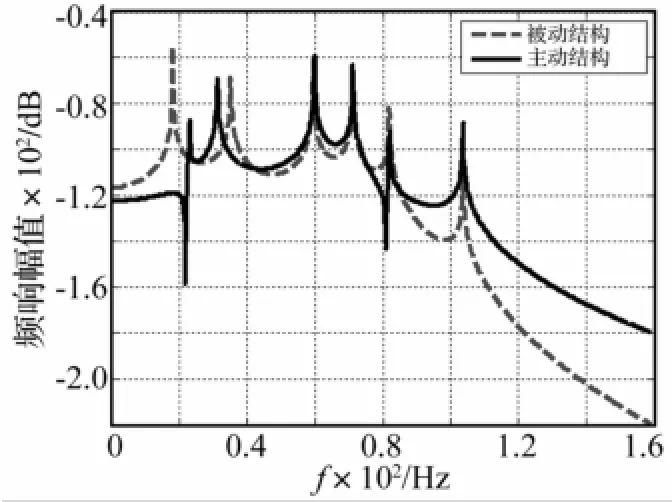
圖2 被動、主動結(jié)構(gòu)頻響Fig.2 Frequency response function of passive and active structures
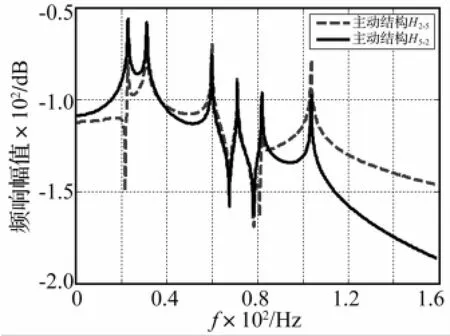
圖3 主動結(jié)構(gòu)頻響Fig.3 Frequency response function of active structures
被動結(jié)構(gòu)的左、右特征向量全等,表示結(jié)構(gòu)振型。主動結(jié)構(gòu)中左右特征向量具有明顯差異,見圖4。由圖4看出,第一、二階左、右特征向量差異明顯,高階特征向量較相似,但并未完全重合。
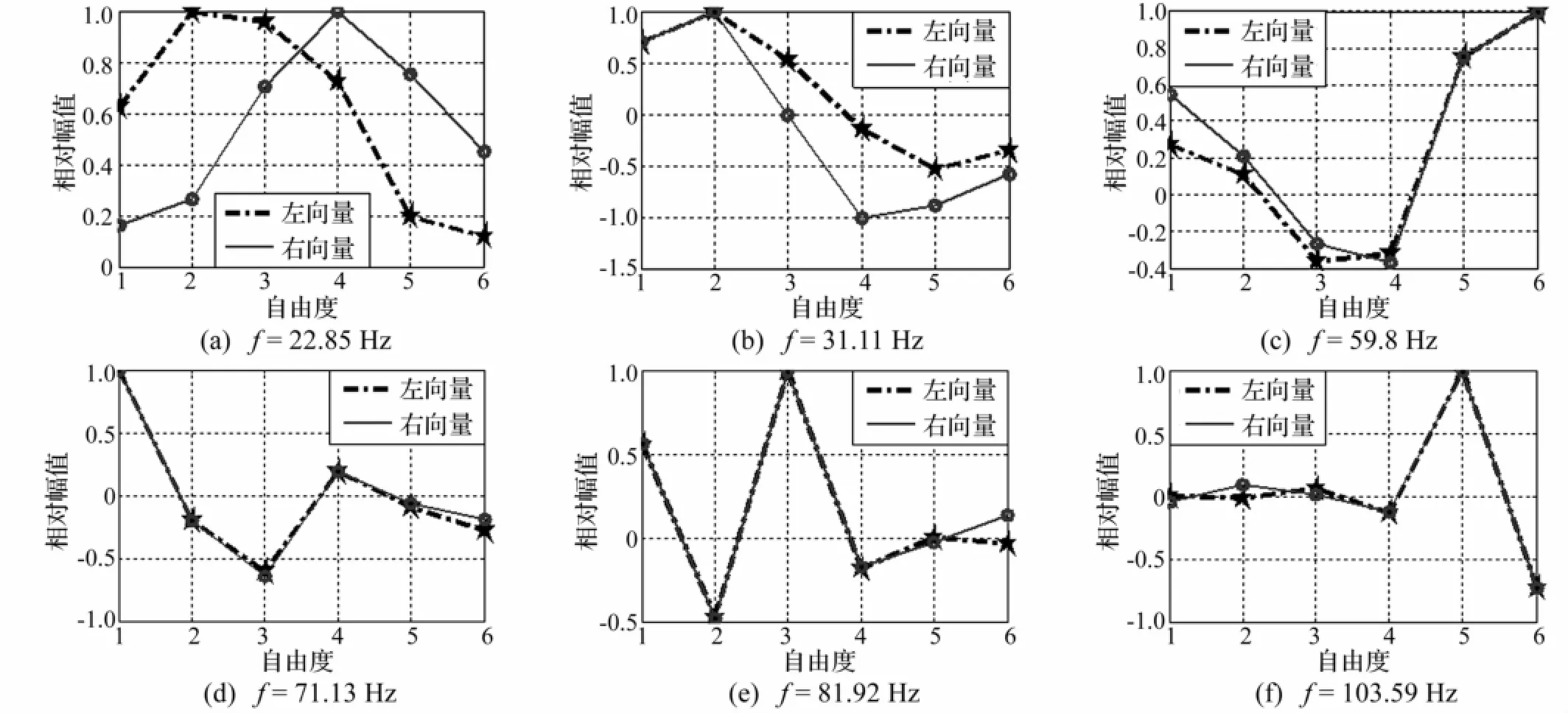
圖4 主動結(jié)構(gòu)左右特征向量Fig.4 The left and right eigenvectors of active structure
4.2 主動結(jié)構(gòu)實驗頻響
設計長寬高為1 200 mm,40 mm,14 mm自由-自由梁,見圖5。
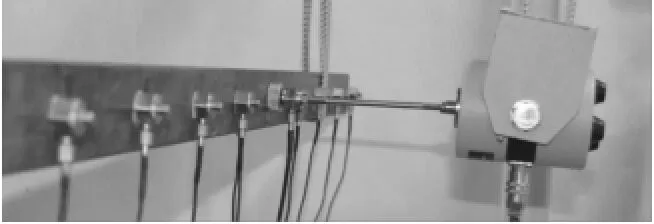
圖5 實驗裝置Fig.5 Experimental set-up
通過對梁1~13點進行錘擊激勵,獲得被動結(jié)構(gòu)的頻響函數(shù)矩陣。在第12點(r點)拾取加速度響應信號,不經(jīng)A/D、D/A轉(zhuǎn)換而經(jīng)電荷放大器后直接通過功率放大器驅(qū)動作動器,調(diào)節(jié)增益系數(shù)。使系統(tǒng)保持穩(wěn)定前提下施加于第5點(p點),保持增益不變組成閉環(huán)回路,構(gòu)建p點控制r點反饋的主動結(jié)構(gòu)。用錘擊法作為開環(huán)激勵。實驗示意圖見6圖。
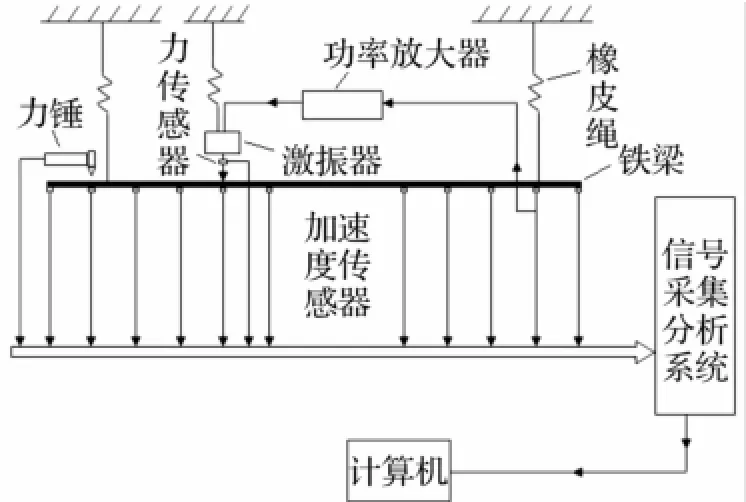
圖6 實驗示意圖Fig.6 Experimental schematic diagram
依次對含反饋控制回路的主動結(jié)構(gòu)1~13點進行錘擊激勵,獲得主動結(jié)構(gòu)頻響函數(shù)矩陣。主動結(jié)構(gòu)與原被動結(jié)構(gòu)對比見圖7,主動結(jié)構(gòu)對稱位置頻響函數(shù)對比見圖8。
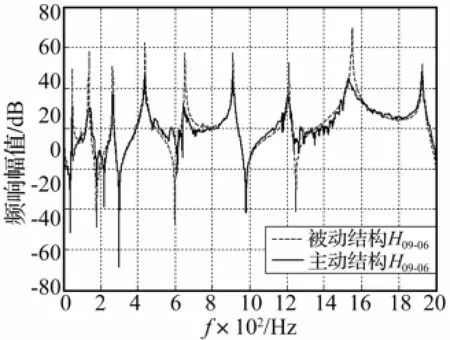
圖7 主被動梁頻響Fig.7 Frequency response functions of passive and active beam
由二圖看出,所有共振峰中1 500 Hz右側(cè)主被動結(jié)構(gòu)的共振峰區(qū)別明顯,被動結(jié)構(gòu)共振頻率為1549 Hz,主動結(jié)構(gòu)共振頻率為1 527 Hz。圖8中主動結(jié)構(gòu)頻響函數(shù)H06-11及H11-06在266 Hz處分別為29.26 dB、26.96 dB,在649 Hz處分別為17.08 dB、9.16 dB,在909 Hz處分別為31.14 dB、33.68 dB,在1530 Hz處分別為19.59 dB、23.93 dB。可見一般情況下,主動結(jié)構(gòu)頻響并不滿足Maxwell互易律,且對稱性被破壞。
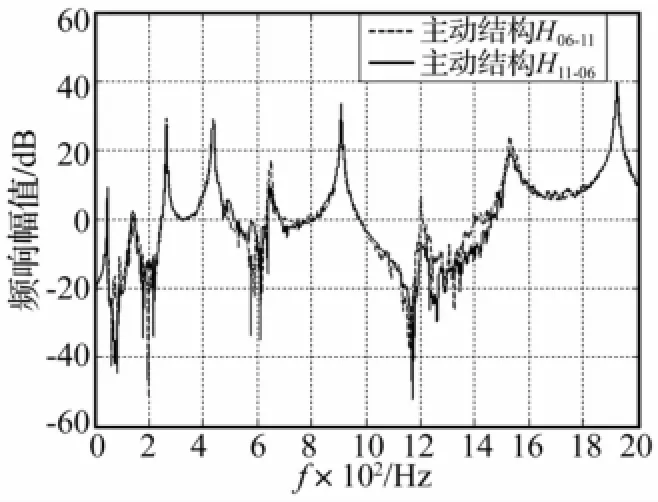
圖8 主動梁頻響Fig.8 Frequency response functions of active beam
5 結(jié) 論
(1)本文由主動結(jié)構(gòu)動力學特征與差異角度進行分析,由反饋信號、控制點與反饋點位置關系及振動方程系數(shù)矩陣對稱性三方面對主動結(jié)構(gòu)分類。并進一步分析三種分類間區(qū)別與聯(lián)系。
(2)通過對主動結(jié)構(gòu)頻響函數(shù)頻域特性分析獲得主動結(jié)構(gòu)與被動結(jié)構(gòu)頻響函數(shù)間關系。由仿真的頻響函數(shù)中提取主動結(jié)構(gòu)左右特征向量并對比其存在差異。利用由鐵梁構(gòu)造的主動結(jié)構(gòu),明晰主被動結(jié)構(gòu)的頻響區(qū)別。
(3)要求主動結(jié)構(gòu)保持系數(shù)矩陣的對稱性,一般工程結(jié)構(gòu)中較難實現(xiàn)。在環(huán)境控制的自激顫振問題中,恰因?qū)ΨQ性破缺程度增長導致系統(tǒng)失穩(wěn)與響應發(fā)散。
[1]Zhang X X,Chen L F,Song H W.Self-contained eigenvector algorithm applied to the identification of aerodynamic derivatives of bridgemodel[J].Science China-Technological Sciences,2011,54(5):1134-1140.
[2]陳予恕,丁千,侯書軍.非線性轉(zhuǎn)子-密封系統(tǒng)的穩(wěn)定性和Hopf分叉[J].振動工程學報,1997,10(3):368-374.
CHEN Yu-shu,DING Qian,HOU Shu-jun.A study on the stability and Hopf bifurcation of nonlinear rotor-seal system[J].Journal of Vibration Engineering,1997,10(3):368-374.
[3]師漢民.金屬切削理論及其應用新探[M].武漢:華中科技大學出版社,2003.
[4]Preumont A.Vibration control of active structures[M].Dordrecht,the Netherland:Kluwer Academic Publishers,1997.
[5]張景繪,龔靖,王永剛.線性主動結(jié)構(gòu)及模態(tài)[J].應用數(shù)學和力學,2004,25(8):771-786.
ZHANG Jing-hui,GONG Jing,WANG Yong-gang.Linear active structures and modes[J].Applied Mathematics and Mechanics,2004,25(8):771-786.[6]Mirzaeifar R,Bahai H,Shahab S.A new method for finding the first-and second-order eigenderivatives of asymmetric nonconservative systemswith application to an FGMplate actively controlled by piezoelectric sensor/actuators[J].International Journal for Numerical Methods in Engineering,2008,75(12):1492-1510.
[7]Ouyang H.Prediction and assignment of latent roots of damped asymmetric systems by structural modifications[J].Mechanical Systems and Signal Processing,2009,23(6):1920-1930.
[8]Wyckaert K,Augusztinovicz F,Sas P.Vibro-acoustical modal analysis:Reciprocity,model symmetry,and model validity[J].Journal of the Acoustical Society of America,1996,100(5):3172-3181.
[9]Adhikari S.Modal analysis of linear asymmetric nonconservative systems[J].Journal of Engineering Mechanics,1999,125(12):1372-1379.
[10]Morvan O,Emmanuel F.On the properness condition for modal analysis of non-symmetric second-order systems[J].Mechanical System and Signal Processing,2009,25(2):601-620.
[11]Serrand M,Elliott S J.Multichannel feedback control for the isolation of base-excited vibration[J].Journal of Sound and Vibration,2000,234(4):681-704.
[12]Zarfam R,Khaloo A R.Vibration control of beams on elastic foundation under a moving vehicle and random lateral excitations[J].Journal of Sound and Vibration,2012,331(6):1217-1232.
[13]顧明,陸海峰.膜結(jié)構(gòu)風荷載和風致響應研究進展[J].振動與沖擊,2006,25(3):25-28.
GU Ming,LU Hai-feng.Wind loads and wind-induced vibration of membrane structures:state of the art[J].Journal of Vibration and Shock,2006,25(3):25-28.
[14]Gu M,Du X Q.Experimental investigation of rain-windinduced vibration of cables in cable-stayed bridges and its mitigation[J].Journal of Wind Engineering and Industrial Aerodynamics,2005,93(1):79-95.
[15]Baxevanou C A,Chaviaropoulos P K,Voutsinas SG,et al.Evaluation study of a navier-stokes CFD aeroelastic model of wind turbine airfoils in classical futter[J].Journal of Wind Engineering and Industrial Aerodynamics,2008,96(8/9):1425-1443.
[16]Zhao Z H,Ren G X,Yu ZW.Parameter study on POGO stability of liquid rockets[J].Journal of Spacecraft and Rockets,2011,48(3):537-541.
[17]Huseyin K,著.張文,譯.多參數(shù)系統(tǒng)的振動和穩(wěn)定性[M].上海:上海科技文獻出版社,1985.
[18]Golub G H,Van Loan C F.Matrix computations[M].Johns Hopkins University Press,Baltimore,MD,1983.
Dynam ic characteristics and frequency response features of active structures
LIU Hai-biao,SONG Han-wen
(School of aerospace engineering and app lied mechanics,Tongji University,Shanghai200092,China)
Active structures can be found in several engineering fields,including active control and a variety of self-excited chatter.The dynamic characteristics of active structure were analyzed.Active structures were classified from different perspectives and discussed in the light of several typical examples.Thus,active structure and non-self-adjoint structure were distinguished.Besides,the frequency response features of active structures were studied and the relationship between frequency response functions of active structure and its corresponding passive structure was elaborated.With the help of a simulation system,the differences between frequency response functions of active and passive structure were revealed and the left and right eigenvectors of active structure were exhibited.Through experiments and data processing,the frequency response functions of the active structure constructed by a free-free beam were obtained and the frequency response characteristics were verified experimentally.
active structure;classification;frequency response functions;left eigenvectors
O327;TB123
:A
10.13465/j.cnki.jvs.2014.22.022
國家自然科學基金重點項目(11322009);面上項目(11272235)
2013-09-03 修改稿收到日期:2013-11-21
劉海標男,碩士,1989年生
宋漢文男,博士,教授,博士生導師,1961年生
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
工業(yè)設計(2022年8期)2022-09-09 07:43:20
哲學評論(2021年2期)2021-08-22 01:53:34
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
天天愛科學(2020年6期)2020-09-10 07:22:44
中華詩詞(2019年7期)2019-11-25 01:43:04
數(shù)學物理學報(2017年6期)2018-01-22 02:26:40
家庭影院技術(2017年9期)2017-09-26 03:41:45
影視與戲劇評論(2016年0期)2016-11-23 05:26:01