基于重復控制方法的三相PWM整流器控制策略研究
2014-05-11 11:19:34高學軍李克成佘小莉
通信電源技術 2014年3期
高學軍,李克成,佘小莉
(三峽大學,湖北宜昌443002)
0 引言
三相PWM整流器作為一種能高效提升電源功率因數的新型電力電子變流裝置,在大功率用電設備上得到了廣泛的應用,有效地減小了電力電子裝置對電網的諧波注入。三相PWM整流器一般采用解耦控制方法實現有功電流和無功電流分量的獨立控制[1]。電壓外環和無功電流內環控制器多采用PI控制器,PI控制方法對于出現的負載瞬變等非周期性擾動能起到較好的調節作用,但僅采用PI控制器反饋環節難以達到抑制周期性干擾的目的,使得系統穩態性能下降。尤其對于一些對電源電壓質量要求較高的用電設備會出現較大的干擾,導致性能下降。
為了確保系統不僅具備快速調節的能力而且擁有較高的穩態精度,本文結合了重復控制抗周期性干擾強的優點和PI控制快速性的特點,通過一個并聯結構,將PI控制器的輸出和重復控制器的輸出相疊加,得到能兼顧動態和穩態性能的混合控制器,并通過PSIM仿真軟件平臺驗證了引入重復控制方法后三閉環控制系統的有效性。
1 三相PWM整流器數學模型分析
1.1 同步旋轉坐標系下三相PWM整流器模型
圖1為三相PWM整流器原理圖,按照對應的電壓電流關系可以列寫出三相PWM整流器的交流側和直流側的狀態微分方程。
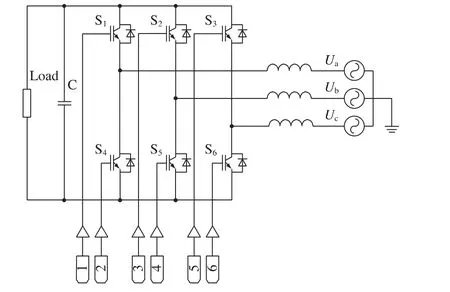
圖1 三相PWM整流器電路原理圖
由于三相PWM整流器兩側的微分方程表達式中包含有三相對稱變量,通過將三相對稱變量映射到同步旋轉坐標系下,可以把對稱三相電量轉化為直流量,從而將三相PWM整流器的數學模型簡化為如式(1)所示的數學模型[2]。
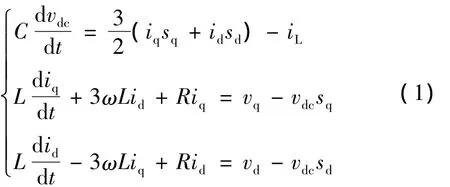
式中,ω 為角頻率;id、iq、Ud、Uq分別為三相交流電流和電壓在同步旋轉坐標系兩軸上的分量;C、L分別為直流母線電容和交流側電感;Sa、Sb、Sc為單極性二值邏輯開關函數。
根據三相PWM整流器在同步旋轉坐標系下的簡化數學模型,可以容易地畫出三相PWM整流器在同步旋轉坐標系下的等效電路,如圖2所示[3]。將三相對稱電量轉化到同步旋轉坐標系下,可以把三相交流量的控制簡化為兩路直流量的控制,單獨控制有功和無功電流。
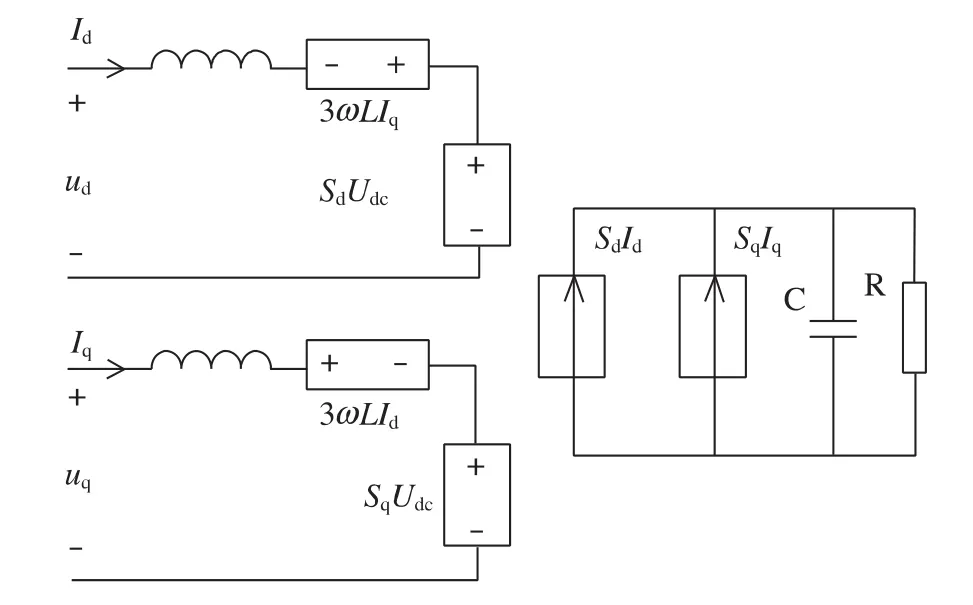
圖2 三相PWM整流器在旋轉坐標系下的等效電路
1.2 三相PWM整流器三閉環控制方法
三相PWM整流器多采用電壓矢量定向方式來實現解耦控制(即d軸方向為電壓矢量方向),如圖3所示,其中向量E、Is分別代表同步旋轉坐標系下的電網電壓和輸入電流矢量。圖3中,三相采樣電流經過坐標變換,由于矢量的d軸分量和電壓矢量方向重合,其為有功電流分量,q軸分量和電壓矢量方向正交,其q軸分量為無功分量。
2 復合控制方案分析
在實際情況下輸入電流是基波分量和高次諧波相疊加而成。而開關管死區和非線性因素引起的誤差大多會按基波周期以完全相同的波形復現,即誤差具有重復性。重復控制方法是根據內膜控制原理被提出,其基本思想是假設前一個基波周期的畸變會在下一個基波周期內重復出現[4]。所以采用重復控制方法能抵消重復性誤差。
重復控制的實現方法是通過重復信號發生器累加每個基波周期完成誤差,來逼近周期性擾動從而達到抵消其干擾的目的。由于重復控制器是對上個基波周期內的誤差存儲到下個基波周期內進行補償,重復控制指令滯后一個基波周期產生作用,對于非周期性的擾動不產生作用,幾乎等效于開環系統[5],動態特性較差。
采用混合控制方法可以綜合PI控制和重復控制的優點,互為補充。PI環節消除非周期性擾動引起的振蕩和超調,達到快速響應的目的,而重復控制環節克服穩態運行時波形周期性的畸變,混合型控制器實際上是兩者的疊加[5](并聯結構)。
圖4所示為改進后的三閉環控制系統,其中RC代表重復控制器。控制系統保持原有的直流母線電壓,外環仍采用PI控制器,有功電流內環和無功電流內環上疊加重復控制環節來抑制d軸電流分量和q軸電流分量的周期性擾動。
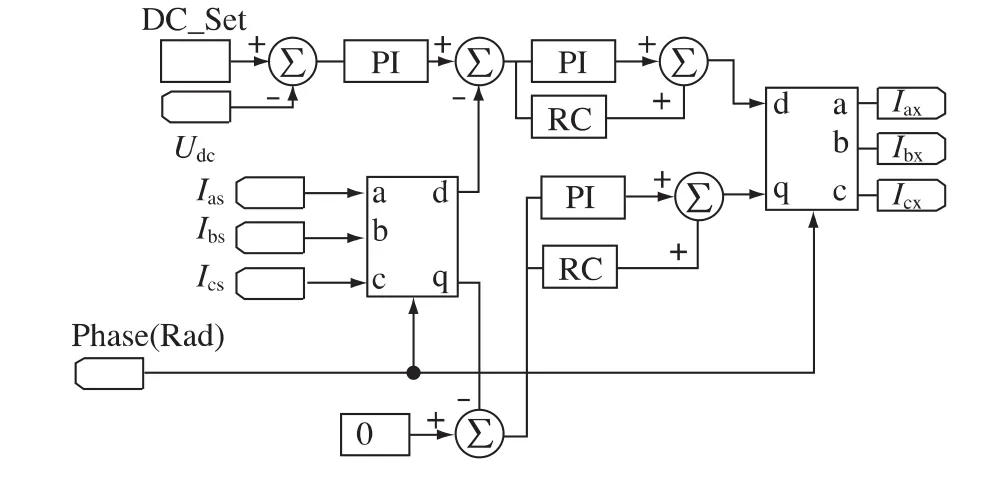
圖4 改進的三閉環控制系統框圖
混合控制器如圖5所示,其中Cs(z)為PI控制器離散域的傳遞函數,P(z)為被控對象的離散域傳遞函數,Kpwm為調制比例系數,n為基波周期內控制器采樣的點數,Cz(z)為重復控制器的補償環節。而Q(z)是一個低通濾波器,其主要作用是降低內模的敏感度,提升其穩定性[6],這里可以設置其為Q(z)=(1+z-1+z)/4;設置復合控制器的離散域的傳遞函數為式(2)。

對q軸被控對象P(z)和PI控制器采用雙線性變換法進行離散化,可以得到q軸電流閉環系統的閉環傳遞函數Gq(z),變換結果如式(3)所示。
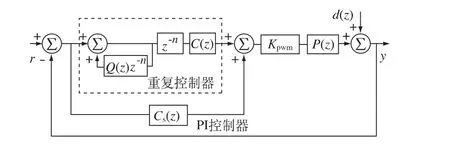
圖5 混合控制器框圖
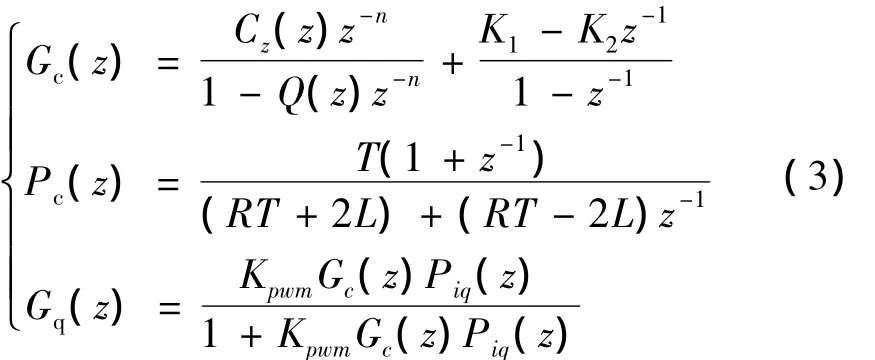
其中K1和K2分別為PI控制器PI控制參數之和以及PI參數之差,T為采樣周期。閉環系統特征方程為1+KpwmGc(z)P(z)=0,通過對特征方程的化簡,根據勞斯判據可由多項式(4)的系數判定電流閉環的穩定性。

根據對三相PWM整流器數學模型的分析,可以容易得到q軸和d軸閉環系統的閉環傳遞函數。由于解耦模型的對稱性,q軸和d軸電流閉環相同,采用相同的方法即可得出d軸電流閉環的特性。
3 實驗結果
在PSIM仿真軟件上搭建了三相PWM整流器控制模型來驗證以上分析和設計。額定輸入三相交流電壓50 Hz,380 V,設定直流母線電壓值650 V,交流側濾波電感2.5 mH,直流母線支撐電容4 700 μF,直流負載25 Ω。在輸入電流信號上疊加周期性干擾信號來模擬周期性的擾動,觀察混合控制方法和只有PI控制器時的輸入電流波形和直流電壓。
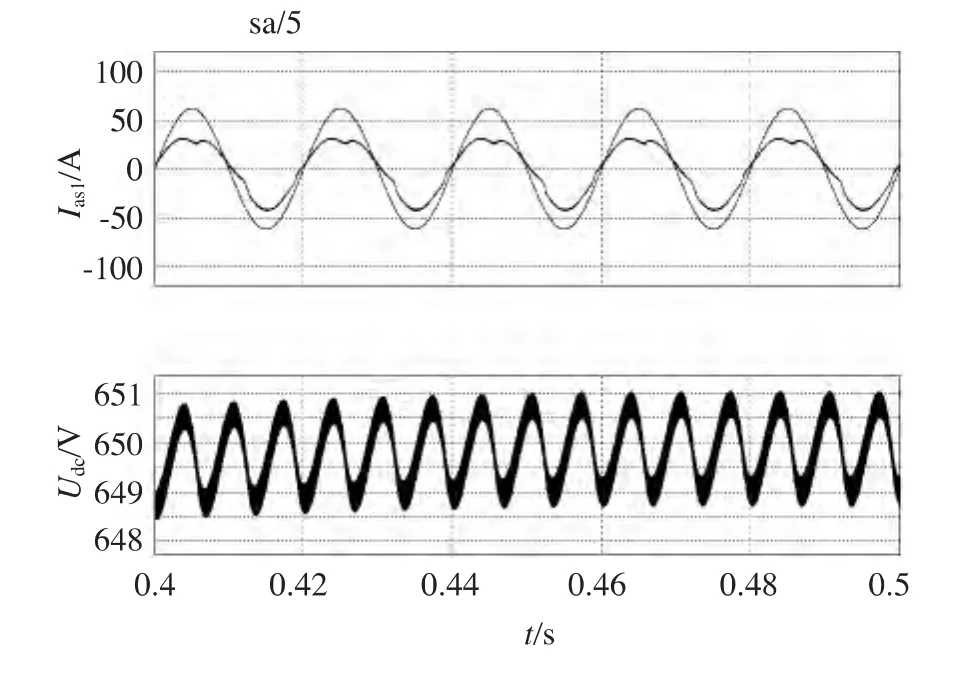
圖6 采用PI控制器時的輸入電流和直流母線波形
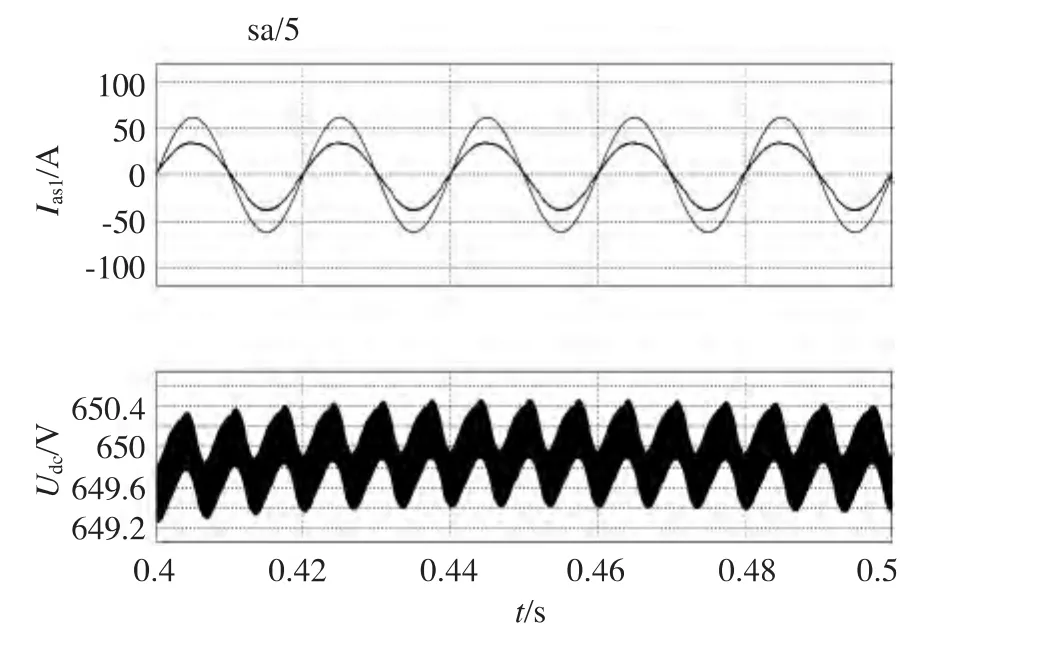
圖7 采用混合控制器時的輸入電流和直流母線波形
通過圖6和圖7對比,在周期性擾動信號的作用下,采用純PI控制器的三相PWM整流器進入穩態后,輸入電流存在明顯周期性畸變,輸入電流基波50 Hz的THD為17.275%。而采用混合控制器后,輸入電流波形畸變率和直流母線電壓的波動均優于僅采用單獨PI控制器時的波形,輸入電流基波為50 Hz的THD為4.274%。
4 結束語
PI控制具有快速調節瞬時擾動的能力,重復控制具有抵消周期性擾動帶來的穩態特性下降的問題。通過把PI控制和重復控制相互并聯疊加起來,兼顧了系統穩態性能和動態性能,使系統能具備抑制瞬時的非周期性擾動和抵消周期性波形畸變的能力。通過PSIM仿真驗證了混合控制器的有效性。
[1]孟大鵬,鄭 帥,王亞威,王志強.基于三閉環控制的PWM整流充電技術研究[J].電力電子技術,2013,47(7):22-24.
[2]張 興,張崇巍.PWM整流器及其控制[M].北京:機械工業出版社,2012.
[3]徐德鴻.電力電子系統建模及控制[M].北京:機械工業出版社,2011.
[4]李俊林.單相逆變器重復控制和雙環控制技術研究[D].武漢:華中科技大學碩士學位論文,2004.
[5]李翠艷,張東純,莊顯義.重復控制綜述[J].電機與控制學報,2005,9(1):37-44.
[6]楊云虎,周克亮,盧聞州.三相PWM逆變器魯棒重復控制策略[J].東南大學學報(自然科學版),2011,41(4):750-756.