基于動態Terminal滑模控制的無刷直流電機系統研究
2014-05-11 03:10:44苗敬利
制造業自動化 2014年11期
關鍵詞:系統
苗敬利,鄒 靖
(河北工程大學 信息與電氣工程學院,邯鄲 056038)
基于動態Terminal滑模控制的無刷直流電機系統研究
苗敬利,鄒 靖
(河北工程大學 信息與電氣工程學院,邯鄲 056038)
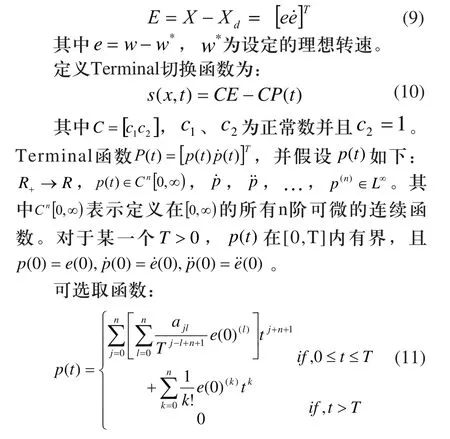
0 引言
無刷直流電機(BLDCM)因其可靠性高、體積小、控制精度好等優越性能,被廣泛應用于生活的各個領域[1,2]。隨著其應用的不斷擴展,對其控制性能要求也越來越高,傳統的速度控制器中主要采用的是PID控制算法,在系統的快速性、抗干擾能力和對負載變化的適應能力上不夠理想,從而很難達到閉環系統要求的動靜態性能指標。滑模變結構控制與傳統PID控制相比,其算法簡單、易于實現,并且不受受控系統參數變化和噪聲干擾的影響,故具有良好的非線性跟蹤特性和更強的魯棒性,是解決非線性問題的重要方法[3,4]。本文以二相導通三相星型連接無刷直流電機為研究對象,設計一種動態Terminal滑模控制器,并利用Lyapunov函數證明其穩定性,使系統狀態在有限的時間內收斂至平衡點,提高控制效果[5]。
1 無刷直流電機(BLDCM)的數學模型
無刷直流電機三相定子繞組的平衡方程:
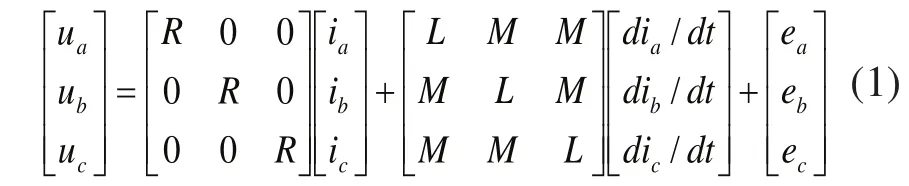
其中:ua、ub、uc為三相定子繞組電壓;ia、ib、ic為三相定子繞組電流;r:定子電阻;L:定子相自感;M:定子相互感;ea、eb、ec為定子各相反電勢。
本文假設電機三相繞組Y型對稱連接,并且沒有中線,在忽略電機鐵心飽和,不計渦流損耗和磁滯損耗的情況下分析數學模型及電磁轉矩等特性。則有:

將式(2)與式(3)代入式(1),可變為:

無刷直流電機(BLDCM)的轉矩方程:

電機的運動方程:

其中:Te為電磁轉矩;TL為負載轉矩;J為轉動慣量;B為摩擦系數;w為機械轉速。
2 動態Terminal滑膜控制器設計
2.1 動態Terminal滑膜變結構的原理

系統描述為:

2.2 無刷直流電機的動態Terminal滑膜控制器設計
由式(3)和式(4)可推出:

定義控制系統的跟蹤誤差為:
定義動態Terminal滑動模面為:

其中λ為正的常數。
系統穩定性分析:
定義Lyapunov函數:


設計動態滑模控制律為:

將式(17)代入式(14),整理得:

2.3 基于動態Terminal滑模變結構控制算法的仿真分析

圖1 基于動態Terminal滑模變結構控制算法的無刷直流電機控制系統模型
3 系統仿真與實驗結果


圖2 a相電流響應曲線

圖3 a相反電勢響應曲線
由以上仿真圖可知,實際波形與理論波形基本上保持一致,證明了該控制算法可行,且具有良好的動靜態性能,能保證系統穩定運行,驗證了仿真模型的正確性和可行性。
下面將該控制算法與傳統的PID控制算法相比較,所選用的PID控制器參數設定為:Kp=5,Kd=0.001,Ki=0.01。所得的仿真曲線如圖4~圖5所示。
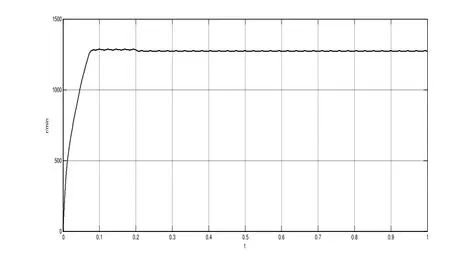
圖4 動態Terminal滑模控制速度響應曲線

圖5 傳統PI控制速度響應曲線
本文利用了MATLAB/Simulink對無刷直流電機控制系統進行了仿真實驗分析,得到了應用了動態Terminal滑模控制后的仿真圖形,證明該算法可消除切換函數引起的抖振,確保了在有限時間內使系統狀態收斂為零。并且將此控制算法與傳統的PID控制算法比較,證明了通過動態Terminal滑模控制算法對速度控制器的調節,使整個閉環系統具有更好的快速性,跟蹤精度高,達到了要求的控制精度。
4 結束語
針對傳統電機速度控制器存在的跟蹤精度差和收斂性行不夠的特點,本文綜合了Terminal滑模控制的收斂性和動態滑模的快速穩定性,設計了由動態Terminal滑模控制算法調節的無刷直流電機速度控制器,確保跟蹤誤差在有限時間內收斂至零的前提下使整個閉環系統有個更好的魯棒性和動靜態性能指標。從仿真結果上看,改控制算法也提高了系統的控制精度,消除了抖振,具有實際的應用價值。
[1]夏長亮.無刷直流電機控制系統[M].北京:科學出版社,2009:1-15.
[2]Yu Liu, Chen Guo,Jin Lv. Adaptive Nonlinear Backstepping Sliding Mode Control for Ship Course Tracking[J].Proceedings of the 4th International Conference on Impulsive and Hybrid Dynamical Systems,2007,1547-1551.
[3]賈洪平,魏海峰.無刷直流電機滑模變結構電流控制[J].微電機,2010;43(2):58-61.
[4]劉金琨.滑模變結構控制MATLAB仿真[M].北京:清華大學出版社,2005:333-360.
[5]雷曉犇,陳卓,熊攀,譚海軍.基于模糊動態Terminal滑模的永磁同步電機控制研究[J].空軍工程大學學報.2012(13):6-10.
Research about a system of the brushless DC motor based on dynamic Terminal sliding mode control
MIAO Jing-li, ZOU Jing
無刷直流電機(BLDCM)由于具有結構簡單、效率高、維護方便等優點,因此得到了廣泛的應用。但在其工作過程中,易受到外部干擾、參數攝動等因素的影響。針對這一問題,本文引入了動態Terminal滑模控制器,可使系統狀態在有限時間內收斂為零,突破了普通滑模控制在線性滑模面條件下狀態漸進收斂的特點。仿真結果表明所用控制算法提高了系統的穩態跟蹤精度,對參數變化不敏感且魯棒性好,使整個閉環系統滿足期望的動靜態性能指標。
無刷直流電機;滑模變結構控制;閉環控制系統;抖振
苗敬利(1967 -),女,副教授,博士,主要研究方向電力電子與電力傳動、非線性控制。
TM3
A
1009-0134(2014)06(上)-0061-03
10.3969/j.issn.1009-0134.2014.06(上).17
2014-01-02
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
