擺動伺服氣缸定位控制策略與實驗研究
2014-05-10 07:47:10柏宗春李小寧
機床與液壓 2014年23期
關(guān)鍵詞:控制策略
柏宗春,李小寧
(南京理工大學機械工程學院,江蘇南京210094)
0 前言
目前在工業(yè)自動化中應(yīng)用的氣動系統(tǒng)主要是順序動作的控制系統(tǒng),大多數(shù)執(zhí)行元件只能在始末端定位。隨著工業(yè)自動化的廣泛應(yīng)用和制造業(yè)降低成本,增加利潤的需求,人們提出了用低成本的具備行程中任意位置定位功能的氣動執(zhí)行元件代替電氣伺服執(zhí)行元件的新要求。擺動氣缸是一種在小于360°范圍內(nèi)作往復(fù)擺動轉(zhuǎn)動的氣動執(zhí)行元件,常與氣爪,真空吸盤等配合使用用于工件的翻轉(zhuǎn)、夾緊、搬運等作業(yè),工業(yè)用途十分廣泛。目前工業(yè)應(yīng)用中還主要依靠在其外部設(shè)立機械擋塊實現(xiàn)定位,本質(zhì)上仍然是“兩點式”的定位方式,無法解決在工業(yè)現(xiàn)場中位置不能提前預(yù)知的定位問題,且不能實現(xiàn)定位保持,定位剛度仍然較低,基于普通擺動氣缸的位置伺服系統(tǒng)在實驗室狀態(tài)下取得良好定位精度也以犧牲氣動系統(tǒng)高速特性為代價,且定位剛度低,容易受外界干擾不能實現(xiàn)工業(yè)應(yīng)用。因此研究一種新型的擺動氣缸使其依靠自身裝置實現(xiàn)在行程中任意位置的快速、高精度定位對于氣動技術(shù)在位置控制領(lǐng)域的研究有著重要意義[1-5]。
1 擺動伺服氣缸結(jié)構(gòu)
氣體介質(zhì)的低阻尼特性實現(xiàn)了氣壓傳動高速特性的同時也是造成氣動伺服難以精確控制的原因之一,要想既保持氣動系統(tǒng)的高速特性又能實現(xiàn)精確的位置定位,變阻尼力矩控制是實現(xiàn)上述目的的優(yōu)選途徑,因此研究給擺動氣動執(zhí)行器施加主動阻尼,根據(jù)運行過程中的不同階段采取變阻尼的策略滿足快速驅(qū)動和精確位置定位的雙重要求。
作者在對氣壓驅(qū)動和阻尼技術(shù)方案進行深入研究的基礎(chǔ)上經(jīng)過反復(fù)設(shè)計,提出葉片式氣壓驅(qū)動裝置、圓盤式磁流變液旋轉(zhuǎn)阻尼器、編碼器集成的擺動伺服氣缸總體結(jié)構(gòu)方案。圖1 為內(nèi)嵌磁流變阻尼器的擺動伺服氣缸結(jié)構(gòu)原理圖。

圖1 內(nèi)嵌磁流變阻尼器的擺動伺服氣缸
2 擺動伺服氣缸控制子系統(tǒng)及定位控制策略
2.1 控制子系統(tǒng)
為了實現(xiàn)擺動伺服氣缸在不同工況下的良好定位,需要對驅(qū)動氣壓和阻尼力矩進行協(xié)調(diào)控制,因此構(gòu)建了擺動伺服氣缸的控制子系統(tǒng),其組成原理如圖2所示。

圖2 擺動伺服氣缸控制子系統(tǒng)組成原理圖
虛線表示系統(tǒng)氣動回路,實線表示電回路。由擺動伺服氣缸帶動負載轉(zhuǎn)臺擺動,為了滿足應(yīng)用中不同擺動速度的需求,采用比例流量閥對兩腔進排氣進行節(jié)流控制。用壓力傳感器測量兩腔壓力,壓力傳感器與計數(shù)器的輸出信號經(jīng)數(shù)據(jù)采集卡輸入到計算機,計算機輸出的控制信號經(jīng)數(shù)據(jù)采集卡和阻尼器驅(qū)動電源調(diào)節(jié)阻尼器線圈電流以獲得相應(yīng)阻尼力矩,經(jīng)數(shù)據(jù)采集卡和功率放大器驅(qū)動比例流量閥以控制擺動伺服氣缸兩腔的不同節(jié)流的進排氣。圖3 為擺動伺服氣缸定位研究實驗臺照片。
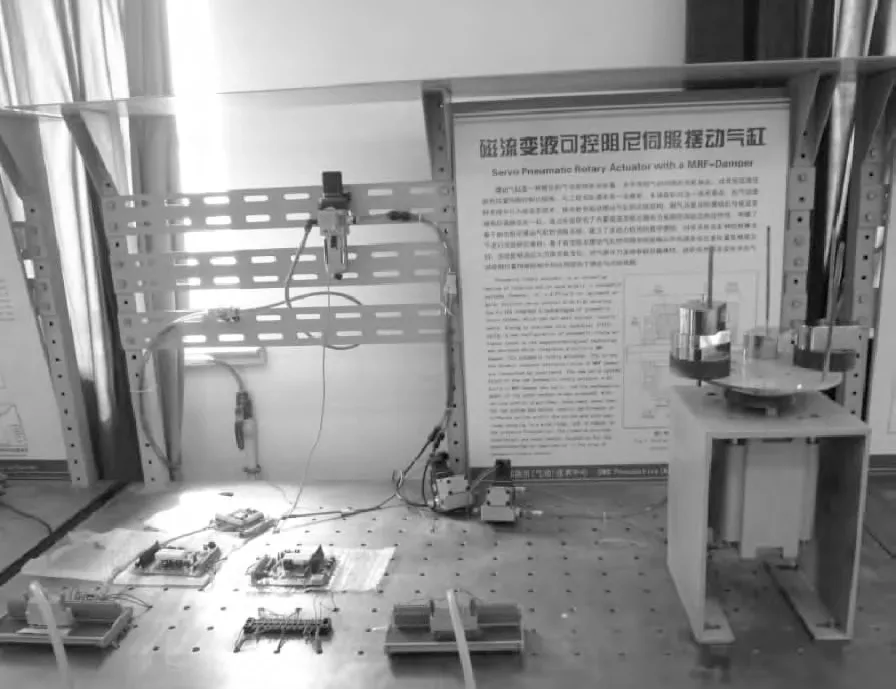
圖3 實驗臺照片
2.2 定位控制策略
2.2.1 阻尼角度
擺動伺服氣缸實現(xiàn)即快又準的定位其過程分為小阻尼驅(qū)動和大阻尼定位,在擺動伺服氣缸運行過程中,通過編碼器測量主軸轉(zhuǎn)動角度,當?shù)竭_目標角度后發(fā)出定位信號,關(guān)閉進氣閥口,磁流變液阻尼器通電工作,此時由于磁流變液阻尼器響應(yīng)延時以及減速過程固有行程的影響,使得擺動伺服氣缸主軸會在設(shè)定目標位置之后的位置停止,因此產(chǎn)生超程量,我們稱該超程量為阻尼角度。如果可以根據(jù)補償原理,使系統(tǒng)在到達設(shè)定位置之前發(fā)出定位信號,使補償量等于阻尼角度就可以大大提高定位精度,因此對定位信號發(fā)出后的阻尼角度進行分析。
在阻尼定位過程中主軸所受的力矩如圖4所示,設(shè)阻尼起始時刻為t0,主軸停止時刻為tm,且起始時刻的系統(tǒng)狀態(tài)為:角位移θ0、轉(zhuǎn)速ω0、兩腔壓力p10和p20。
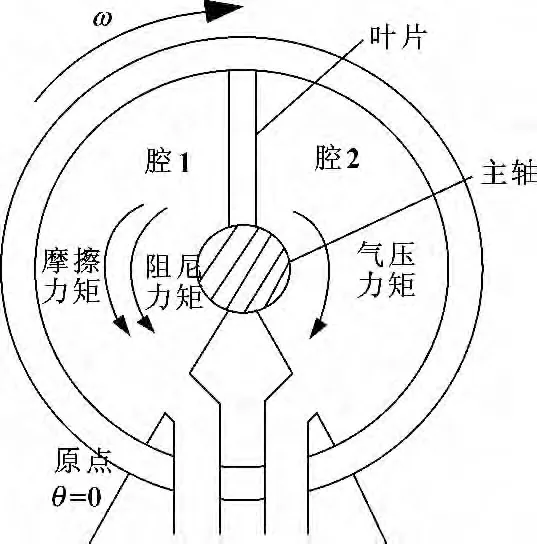
圖4 阻尼過程中主軸受力矩示意圖
依據(jù)運動學原理,在阻尼過程中存在如式(1)描述的運動學關(guān)系
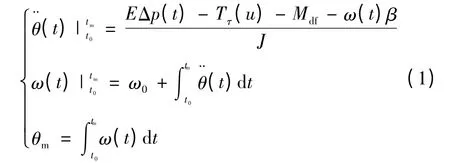
式中:θm為阻尼角度,rad;
E為擺動伺服氣缸葉片面積,m2;
Tτ(u)為阻尼器磁致阻尼力矩,N·m;
Mdf為庫侖摩擦力矩,N·m;
ω 為角速度,rad/s;
β 為黏性摩擦系數(shù),N·m /(rad/s);
Δp(t)為阻尼定位過程中兩腔壓力差,Pa;
J為慣性負載,kg·m2。
在定位信號發(fā)出后,氣缸兩腔壓力不能立即降為大氣壓力,兩腔均有放氣過程,此時兩腔壓力差形成的力矩仍作用在主軸上,依據(jù)氣壓傳動動力學模型[6],阻尼定位過程中兩腔的壓力變化可以表示為式(2)的函數(shù)形式

則兩腔壓力差

聯(lián)立式(1)和式(2),阻尼角度為變量θ0,ω0,p10,p20,J,u的函數(shù),即

即阻尼角度只與系統(tǒng)狀態(tài)、轉(zhuǎn)動慣量及阻尼器控制電壓有關(guān),但之間的關(guān)系涉及高階微分方程及氣體流動模型的求解,函數(shù)f很難解析表示,因此要直接解析求出θm是不行的,只能用該公式對阻尼角度的影響因素做定性分析。由于擺動氣缸主要用于固定負載的搬運,因此該研究僅針對固定負載下的工況,因此關(guān)系式(4)簡化為

研究結(jié)果表明,BP 型神經(jīng)網(wǎng)絡(luò)能夠很好地逼近任意連續(xù)函數(shù)[7],鑒于神經(jīng)網(wǎng)絡(luò)的對非線性函數(shù)良好的逼近性能,因此構(gòu)建了BP 神經(jīng)網(wǎng)絡(luò)實現(xiàn)對阻尼角度的預(yù)測。
目前關(guān)于神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)設(shè)計還沒有一個統(tǒng)一、完備和確定型的理論框架,一般依據(jù)經(jīng)驗或者試湊法對比確立。文中按神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)設(shè)計經(jīng)驗[8]確立網(wǎng)絡(luò)結(jié)構(gòu),構(gòu)建基于公式(5)的神經(jīng)網(wǎng)絡(luò)非線性模型,確定該網(wǎng)絡(luò)以p10、p20、ω0、θ0、u為輸入,以θm為輸出,輸入神經(jīng)元有5 個,隱含層內(nèi)有11 個神經(jīng)元,激活函數(shù)F1采用logsig 函數(shù),輸出層內(nèi)有1 個神經(jīng)元,對應(yīng)的激活函數(shù)F2采用purelin 函數(shù),其拓撲結(jié)構(gòu)如圖5所示。

圖5 用于阻尼角度預(yù)測神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)
在系統(tǒng)的工作區(qū)域內(nèi),選取足夠豐富的激勵信號作為系統(tǒng)的輸入,獲取系統(tǒng)的動靜態(tài)特性。在初始化后,按選取的比例閥電壓驅(qū)動擺缸轉(zhuǎn)動,當主軸到達設(shè)定角度時,發(fā)出定位信號,以設(shè)定阻尼控制電壓u進行阻尼定位,采集阻尼定位起始時刻系統(tǒng)狀態(tài)參數(shù)ω0、θ0、p10、p20,并記錄定位信號發(fā)出后主軸轉(zhuǎn)動的角度作為阻尼角度θm。重復(fù)上述過程,測量多組輸入輸出數(shù)據(jù)獲得樣本數(shù)據(jù)用來訓(xùn)練神經(jīng)網(wǎng)絡(luò)。
2.2.2 阻尼角度動態(tài)補償定位控制策略
在補償控制原理下,理論上只要依據(jù)預(yù)測的阻尼角度與當前位置和目標位置的關(guān)系確立準確的阻尼起始點達到對阻尼角度的補償即能實現(xiàn)精確的位置控制,但是阻尼角度的固定補償方式本質(zhì)上是阻尼定位過程的開環(huán)控制,不能有效地抑制擾動,在實際應(yīng)用中定位誤差較大,研究結(jié)合非線性PID 控制策略[9]利用阻尼器輸出力矩連續(xù)可調(diào)的優(yōu)點實現(xiàn)阻尼角度的動態(tài)補償,以達到良好的控制效果。
在阻尼定位過程中以給定的某參考阻尼控制電壓為網(wǎng)絡(luò)輸入,再依據(jù)實時狀態(tài)預(yù)測阻尼角度作為阻尼定位過程中的目標模型,通過離目標角度θτ的距離(即剩余行程)與目標模型輸出的差值來調(diào)節(jié)阻尼器控制電壓,以使剩余行程與參考阻尼角度一致。
阻尼器控制電壓的調(diào)節(jié)范圍為u∈[0,4]V,折中考慮,系統(tǒng)以uref=2 V 作為神經(jīng)網(wǎng)絡(luò)預(yù)測參考阻尼角度的控制電壓輸入,即

其中,非線性映射f即為訓(xùn)練好的神經(jīng)網(wǎng)絡(luò)。
基于阻尼角度動態(tài)補償定位控制策略的擺動伺服氣缸定位系統(tǒng)控制框圖如圖6所示。
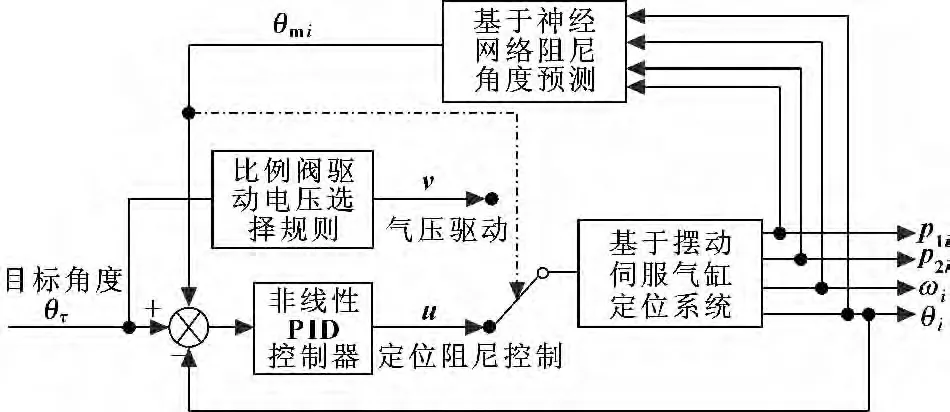
圖6 阻尼角度動態(tài)補償?shù)亩ㄎ豢刂撇呗?/p>
擺動伺服氣缸定位系統(tǒng)的運行過程如下:
(1)氣壓驅(qū)動
根據(jù)實際運行速度要求,選取合理比例閥驅(qū)動電壓對擺動伺服氣缸氣壓驅(qū)動。需要說明的是,選取越大的比例閥驅(qū)動電壓可以實現(xiàn)更快的氣壓驅(qū)動速度,但由于氣缸啟動行程和阻尼行程的固有存在,對于在較小行程下的定位,對比例閥驅(qū)動電壓的選擇不宜過大,對比例閥最大驅(qū)動電壓vmax的選取可以通過實驗確定。
(2)運行階段切換
在氣壓驅(qū)動階段,在每個運行周期采集系統(tǒng)的狀態(tài)參數(shù),根據(jù)阻尼角度的預(yù)測結(jié)果,當θτ-θ ≥θref時進入阻尼定位階段。
(3)阻尼定位控制
在系統(tǒng)進入阻尼定位后,外界任何有界的擾動都反映在系統(tǒng)的狀態(tài)參數(shù)上,神經(jīng)網(wǎng)絡(luò)依據(jù)實時狀態(tài)參數(shù)更新當前工況下的阻尼角度,對剩余行程與當前工況下的網(wǎng)絡(luò)預(yù)測的阻尼角度進行比較,依據(jù)差值利用非線性PID 控制器對阻尼器的控制電壓進行調(diào)整,可表示為
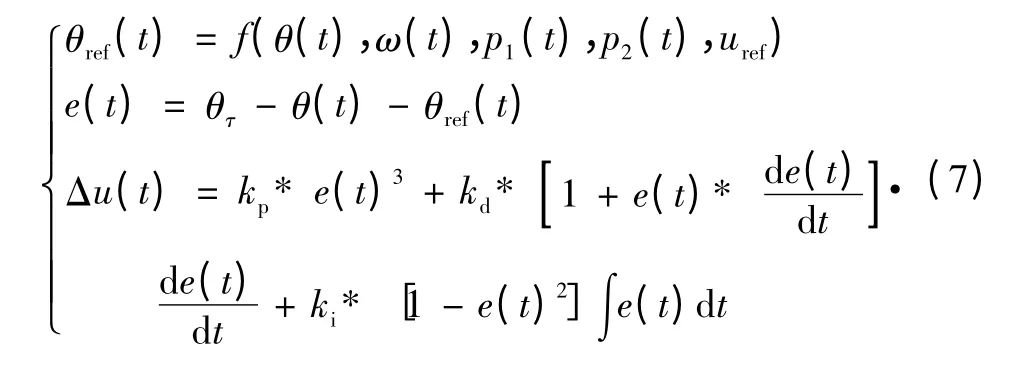
阻尼器控制電壓為

(4)定位保持
為了提高系統(tǒng)的定位剛度,防止系統(tǒng)定位后擾動造成主軸的偏移,在定位完成后給阻尼器一控制電壓對主軸起到定位保持作用,定位保持電壓的值根據(jù)擾動量界確定。
3 實驗研究
為了檢驗擺動伺服氣缸試驗樣機的性能,對擺動伺服氣缸樣機進行了試驗,檢驗其在提出的阻尼角度動態(tài)補償定位控制策略下在行程中任意位置的定位效果。
3.1 阻尼動態(tài)過程
擺動伺服氣缸完成一次位置定位分為驅(qū)動階段和阻尼階段,其中驅(qū)動階段僅根據(jù)工況進行開關(guān)控制,對主動阻尼的控制是實現(xiàn)快速、精確定位的關(guān)鍵,圖7 為在控制器比例系數(shù)kp為14 V/rad 下阻尼定位過程中擺動伺服氣缸內(nèi)部狀態(tài)的動態(tài)過程,包括參考阻尼角度、系統(tǒng)剩余行程、速度及控制信號。

圖7 擺動伺服氣缸阻尼定位動態(tài)過程
由圖7 可以看出,擺動伺服氣缸在阻尼定位過程中,速度無突變平滑下降,通過非線性PID 控制器調(diào)節(jié)阻尼控制電壓,剩余行程能較好地跟蹤神經(jīng)網(wǎng)絡(luò)的預(yù)測阻尼角度,獲得較高定位精度。
3.2 多點定位
在供氣壓力0.42 MPa,比例閥驅(qū)動電壓v=3.2 V,目標定位點為:40°—140°—240°—140°—40°下,圖8 為多點定位實驗曲線,由圖可以看出,對于不同的設(shè)定位置都可以達到良好的控制效果,穩(wěn)態(tài)誤差在±1.0°范圍內(nèi),無超調(diào)和震蕩,調(diào)節(jié)時間小于0.5 s。在定位完成后給阻尼器施加一定的保持電壓,產(chǎn)生的阻尼力矩能夠有效地抑制了在普通氣動伺服中出現(xiàn)的黏滑震蕩及漂移現(xiàn)象,較大地提高了定位剛度。

圖8 多點定位實驗曲線
3.3 定位精度和時間
表1 列出了部分工況下,擺動伺服氣缸在阻尼角度動態(tài)補償定位控制策略下的定位誤差和定位時間。
擺動伺服氣缸完成一次運行的時間包含驅(qū)動運行時間和阻尼定位時間,驅(qū)動階段運行時間受行程、氣源壓力、比例閥驅(qū)動電壓等影響。由表1 可以看出,阻尼定位階段時間都在150 ms 以內(nèi),以比例閥驅(qū)動電壓v=3.34 V,氣源壓力0.45 MPa,目標位置θτ=180°為例,擺動伺服氣缸完成一次運行定位的總時間為0.45 s,保持了氣動系統(tǒng)高速特性。配合提出的控制策略,擺動伺服氣缸的定位精度均在±1.0°范圍內(nèi)。

表1 定位誤差和定位時間
4 結(jié)論
(1)構(gòu)建了擺動伺服氣缸控制子系統(tǒng),對擺動伺服氣缸控制特性進行了理論分析,得到了阻尼角度與狀態(tài)變量之間的非解析函數(shù)關(guān)系,并利用神經(jīng)網(wǎng)絡(luò)對該函數(shù)關(guān)系進行逼近。
(2)針對阻尼角度固定補償下開環(huán)控制精度差的缺點,采用非線性PID 控制器調(diào)節(jié)阻尼器控制電壓,以實現(xiàn)阻尼定位過程中的閉環(huán)控制,提出阻尼角度動態(tài)補償?shù)亩ㄎ豢刂撇呗浴?/p>
(3)在阻尼角度動態(tài)補償?shù)亩ㄎ豢刂撇呗韵聰[動伺服氣缸既保持氣壓傳動高速特性又實現(xiàn)行程范圍內(nèi)任意位置的快速、精確定位,實驗表明阻尼定位時間都在150 ms 以內(nèi),且過程平穩(wěn)無速度突變,實際位移無超調(diào)和震蕩,定位誤差在±1.0°以內(nèi),表明在快速驅(qū)動與精確定位方面取得了較大的進展,具有良好的應(yīng)用前景。在研究的基礎(chǔ)上,對所研發(fā)的擺動伺服氣缸申請了國家發(fā)明專利并獲得授權(quán),專利號為201010211192.2。
[1]路甬祥,阮健,陳行.氣動技術(shù)的發(fā)展方向[J].氣壓與氣動,1991(2):2-3.
[2]李小寧.氣動技術(shù)發(fā)展的趨勢[J].機械制造與自動化,2003(2):1-4.
[3]Technology:Current Practice and New Developments[J].IEE Colloquium,1996(2):311-316.
[4]王祖溫,楊慶俊.氣壓位置控制系統(tǒng)研究現(xiàn)狀及展望[J].機械工程學報,2003(12):10-16.
[5]陳啟復(fù).對我國氣動工業(yè)現(xiàn)狀與未來發(fā)展的思考——氣動行業(yè)“十二五”發(fā)展規(guī)劃建議[J].液壓氣動與密封,2012(1):16-22.
[6]李建藩.氣壓傳動系統(tǒng)動力學[M].廣州:華南理工大學出版社,1991.
[7]Sandhya Samarasinghe.神經(jīng)網(wǎng)絡(luò)在應(yīng)用科學和工程中的應(yīng)用——從基本原理到復(fù)雜的模式識別[M].史曉霞,等譯.北京:機械工業(yè)出版社,2010.
[8]MATLAB 中文論壇.MATLAB 神經(jīng)網(wǎng)絡(luò)30 個案例分析[M].北京:北京航空航天大學出版社,2010.
[9]郭彥青,姚竹亭,王楠.非線性PID 控制器研究[J].中北大學學報,2006,27(5):423-425.
猜你喜歡
艦船科學技術(shù)(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導(dǎo)刊(2018年10期)2018-08-20 02:57:02
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:37
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(shù)(2016年5期)2016-03-22 01:09:38
電機與控制應(yīng)用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36