太陽能游船電力系統拓撲結構研究與改進
2014-05-07 03:19:28紀厚芝俞萬能李素文
船電技術 2014年12期
紀厚芝,俞萬能,李素文
?
太陽能游船電力系統拓撲結構研究與改進
紀厚芝,俞萬能,李素文
(集美大學輪機工程學院,福建 廈門 361021)
在某種在運營太陽能游船中,時而會出現控制器重啟,繼而導致全船停電的故障,影響船舶運行的安全性。針對這一現象,在分析該船舶現有電力系統結構組成及工作原理基礎上,建立系統數學分析模型,應用MATLAB進行仿真研究,得出系統出現故障的問題關鍵。設計了一種更為完善的電力系統拓撲結構,實船應用說明該系統具有更高穩定性和可靠性。
太陽能游船 電力系統 拓撲結構 改進
0 引言
隨著旅游經濟、水上旅游的發展,游覽船舶需求量不斷增加。但面對日益突出的環境和污染問題,傳統的游覽船舶會對景區生態造成一定的破壞,不利于可持續發展。解決這一問題的方法就是采用新能源船舶,目前新能源船舶普遍采用太陽能[1-3]。太陽能游船電力系統主要由太陽能電池板,鋰電池,電池管理系統,能量管理控制系統組成,而各部分的組成匹配就成關鍵問題[4]。一旦拓撲結構及匹配不合理就會出現整條船電壓不穩,甚至電力中斷,這嚴重影響船舶的舒適性及航行安全。如在一種運營的太陽能游船中,由于鋰電池充電器、控制柜及PLC控制器的拓撲結構不合理,導致PLC偶爾會出現重啟,繼而導致整條船電力系統出現短暫斷電的情況。本文根據該船的電力系統結構,分析現有系統的組成原理,并建立系統仿真模型進行仿真研究,得出系統出現故障的問題關鍵。針對存在的問題,提出一種更為完善的電力系統拓撲結構,提高系統穩定性和可靠性,保證游覽船舶的舒適性及航行安全。
1 太陽能游覽船電力系統簡述
根據太陽能游覽船舶設計基本參數和基本性能要求,針對太陽能源具有低密度、清潔環保等特點,設計了太陽能雙體游覽船,現有太陽能游船中電力系統主主要由太陽能電池組,太陽能控制器,鋰電池,充電器(岸用),控制系統和推進系統組成。控制系統以西門子S7-300PLC為控制核心。鋰電池共有8組,左右各4組,每組電池額定電壓均為48 V。左右第1、2組作為動力用,分別為左右電機供電。左右第4組為生活用電,第3組為備用電池組,既可作為動力也可以作為生活。太陽能游船的控制核心PLC由右邊第3組輸出的48 V直流電經DC/DC轉換為 24 V直流電供電。電力系統結構如圖1所示。
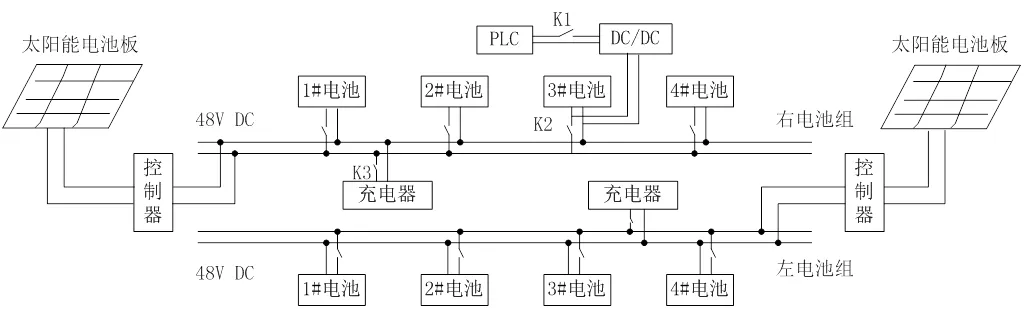
圖1 系統結構圖
在長期運營中,當充電器(岸用)的開關K3閉合(僅接入未工作),開關K1閉合,DC/DC模塊開始給PLC供電,同時控制充電繼電器K2閉合,太陽能充電器開始給右邊組第3電池充電時,PLC會發生重啟的現象,由于整條船的電力都受控于PLC,所以會導致所有動力用電及生活用電短暫中斷。如果充電器(岸用)K3不閉合,重復上述動作時,不會出現上述問題。異常情況如圖2所示。在其他控制狀態下也不會出現類似的問題。
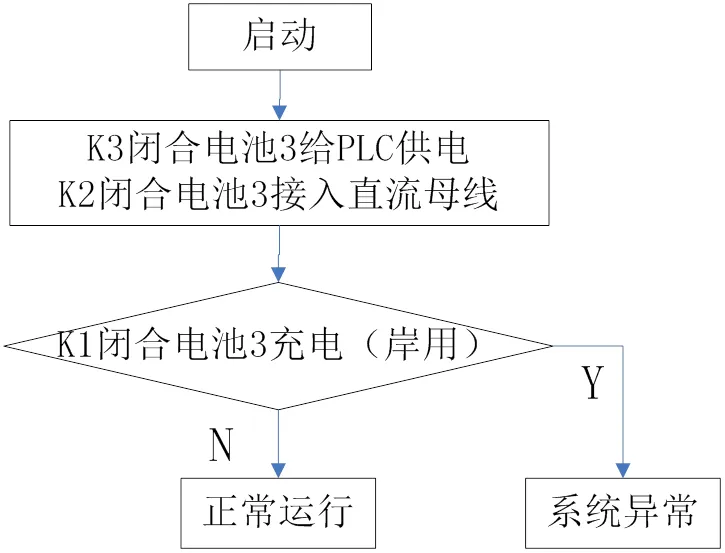
圖2 系統異常情況
2 電力系統建模及分析
根據太陽能游船所出現的問題,分析電力系統結構及其工作原理。從上面的故障描述可以看出,充電器的接入對整個電路的穩定性造成了影響,故本文提取其中的相關部分獨立分析。涉及到的部分包括充電器,DC/DC模塊及PLC。這里著重分析直流變換器DC/DC和充電器(岸用)對整個系統穩定性的影響,
2.1 電力系統充電回路數學模型分析
本文涉及的太陽能游船為純太陽能系統供電,太陽能電池發出的電能經控制器輸送到48V直流母線上。通過控制各電池組的充電接觸器就可以實現太陽能對鋰電池的充電。為滿足連陰雨天氣對太陽能游船的用電需求,配備了岸用充電器。不可避免的當太陽能控制器或充電器接入直流母線時,DC/DC直流變換器不再是一個獨立的部分,它的性能會受到太陽能控制器或岸用充電器的影響。下面我們將對此進行詳細分析。
充電器與DC/DC變換器連接原理圖如圖3所示[5]。
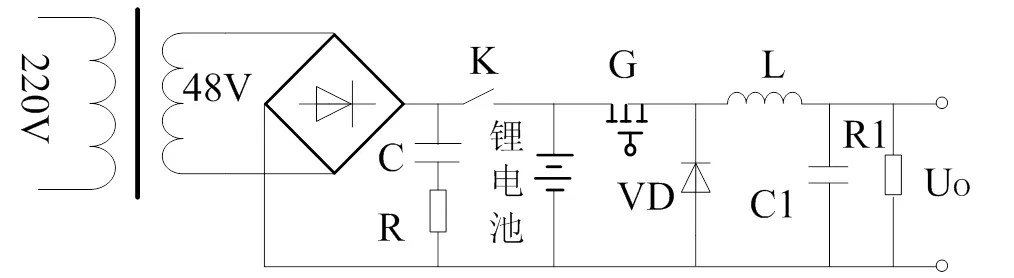
圖3 充電器與DC/DC連接原理
2.2 電源buck電路設計分析
由于本船上所用鋰電池的額定電壓為48 V,而PLC的額定工作電壓是24 V,所以需要進行48V轉24 V的DC/DC變換,這里采用的是降壓式buck電路。在圖2中,開關晶體管G的一個開與關的周期內,將輸入的直流電壓斬波,形成脈寬為T的方波脈沖。
當開關晶體管G導通時,有

當開關晶體管G截止時,有

電感L為:

2.3 電路充電狀態分析
2.3.1 充電狀態
當船上鋰電池能量耗盡且天氣狀況不佳時需要進行岸電補充。將圖3中的開關K閉合,充電器開始工作。本船所用的為充電機為艾默生ECH系列智能充電機,輸出額定電壓為直流47.7 V,輸出電壓范圍為直流42.0—50.0 V。當充電器正常工作時,它的輸出電壓滿足DC/DC設計的輸入電壓范圍,DC/DC模塊可以正常工作。太陽能游船運行平穩。
2.3.2未充電狀態
日常運行條件下,廈門地區光照充足,太陽能電池組發出的電量完全可以滿足該游船的用電需求。這時岸用充電器僅僅接入電路,但沒有工作。等效電路如圖4所示[7]。
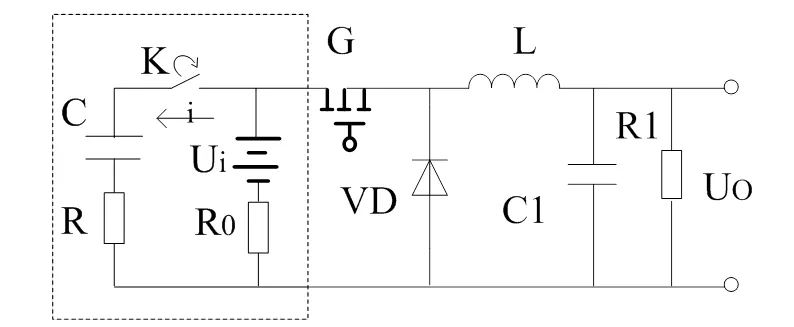
圖4 系統等效電路
電容的電流:

當鋰電池電壓為50V時,開關K閉合瞬間:

3 仿真與分析

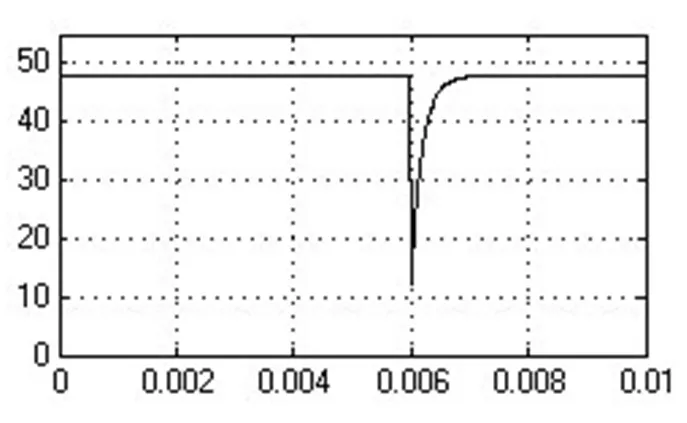
圖5 48 V時DC/DC端輸入電壓
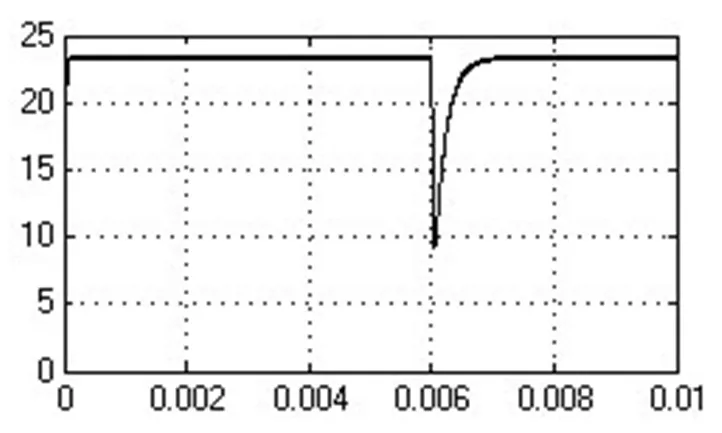
圖6 48 V時DC/DC輸出端電壓
根據圖5-8的仿真可知,當鋰電池電壓在不同工況時,在充電器(岸用)接入電路的瞬間,電池輸出電壓降低至13 V左右,并有一段時間處在40 V以下,這一輸入電壓已經低于DC/DC允許輸入電壓的最低值。因此,此時DC/DC輸出端電壓最低時降至10 V以下,從而使DC/DC在短暫時間內無法提供PLC正常工作所需電壓,導致PLC發生重啟現象。
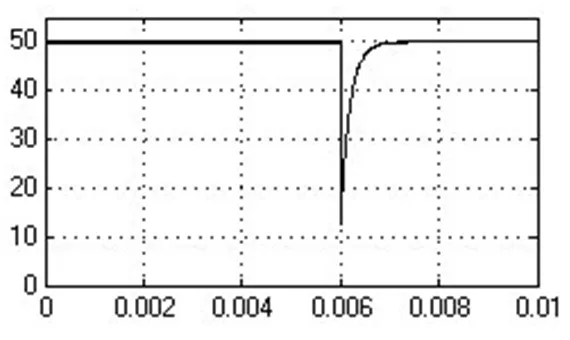
圖7 50 V時DC/DC端輸入電壓
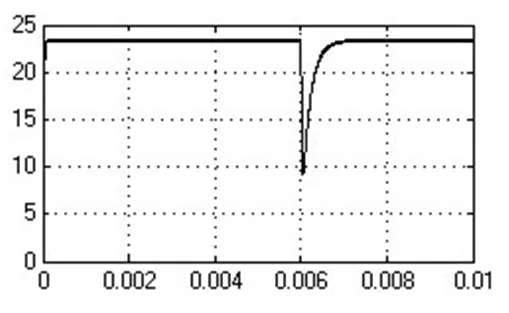
圖8 50 V時DC/DC輸出端電壓
4 解決方案
根據以上數學分析和仿真,如果采用原先設計電力系統將不可避免產生PLC重啟現象,將大大降低系統運行穩定性和可靠性,甚至影響船舶運行安全。針對PLC供電的可靠性高要求,進行以下電力系統改進。在太陽能游艇上增加一組鋰電池單獨為PLC、繼電器等元件供電,電池額定電壓為24 V。該組電池狀態由BMS電池能量管理系統監測控制,電池組充電由逆變器逆變24V直流電直接給電池組充電,如圖9所示。
24 V電源系統控制策略為:當繼電器K4閉合,24 V電池組開始給PLC等設備供電,同時24 V充電器持續給24 V電池組充電,保證該組電池電壓維持在24 V左右。考慮到穩定性,當該組24 V電池組快要達到故障保護狀態時,將會啟用右邊第三組48 V電池作為整船的24 V低壓系統備用電源,此時控制充電器(岸用)開關K3斷開,在48 V電池組連接到DC/DC的回路中串聯一常開繼電器K1。當啟動備用模式時,岸用充電器開關K3斷開,控制常開繼電器K1閉合,右3 48V電池組開始為整個系統供電。這樣充電器(岸用)在未工作狀態下就不會接入到電力系統中,不會影響到DC/DC的性能。PLC、繼電器等由單獨的24 V鋰電池供電大大提高了系統的穩定性。
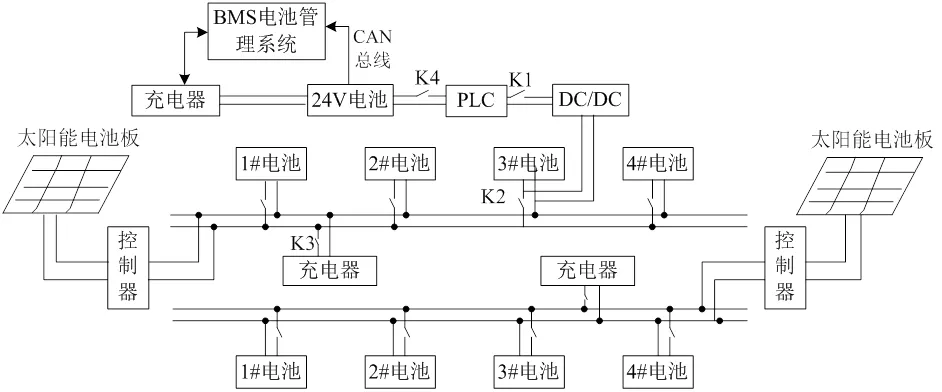
圖9 改進后的電力系統拓撲結構
該系統改造之后并用于實船,在實際應用中,BMS能量管理系統根據鋰電池發出的實時信息不斷調整充電狀態,24 V電池組的電壓基本維持在24 V左右,完全滿足PLC、繼電器等元件的工作要求。PLC沒有再出現重啟的情況,在改進后的電力系統拓撲結構下,整個系統運行穩定。
5 結論
通過對太陽能游覽船電力系統框架的分析及建模仿真,找出了導致PLC偶爾重啟故障的原因。這一問題的解決彌補了PLC供電系統設計之初的不足,使得整條船的控制系統更具穩定性。同時,使我們在設計電氣系統時更加注重電源的匹配問題。本文涉及到的問題,在遇到類似情況時可作為參考。
[1] 嚴新平. 新能源在船舶上的應用進展及展望[J]. 船海工程, 2010, 39(6): 111-120.
[2] 何建海, 張建霞, 胡以懷. 新型能源在船舶中的應用[J]. 中國水運, 2012, 12(10): 76-77.
[3] 李進. 太陽能在船舶動力裝置中的應用與前景[J]. 船海工程, 2010, 39(4): 70-72.
[4] 俞萬能, 李丹, 鄭為民. 太陽能游覽船能量控制系統研發[J]. 中國造船, 2013, 54(3): 177-183.
[5] 劉樹林, 劉健, 寇蕾, 鐘久明. Buck DC/DC變換器的輸出紋波電壓分析及其應用[J]. 電工技術學報, 2007, 22(2): 91-97.
[6] 王輝, 程坦. 直流斬波電路的Matlab/Simulink仿真研究[J]. 現代電子技術, 2009, (5): 174-178.
[7] 邢曉濬. RC一階電路實驗的設計方法研究[J]. 電氣電子教學學報, 2012, 34(6): 69-70.
[8] 陳希有, 李冠林, 劉鳳春. RC電路充電效率分析[J]. 電氣電子教學學報, 2012, 34(2): 32-35.
[9] Cheng Peng, Chia Jiu Wang. An analysis of buck converter efficiency in PWM/PFM mode with simulink[C]. Proceedings of 2013 Spring International Conference on Electrical Engineering(CEE-S), 2013: 64-69.
[10] 呂慶永, 黃世震, 林偉. Buck變換器在SIMULINK下的建模仿真[J]. 通信電源技術, 2008, 25(6): 1-3.
Research and Improvement of the Power System Topology in A Solar Sightseeing Ship
Ji Houzhi, Yu Wanneng, Li Suwen
(Marine Engineering Institute, Jimei University, Xiamen 361021, Fujian, China)
U665.13
A
1003-4862(2014)12-00074-04
2014-10-20
紀厚芝(1989-),男,研究生。研究方向:船舶電力推進及其控制。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
工業設計(2022年8期)2022-09-09 07:43:20
艦船科學技術(2022年2期)2022-03-29 01:12:44
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
裝備制造技術(2019年12期)2019-12-25 03:06:46
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45