基于S7-1200 PLC的船舶電站并車裝置的設計與實現
2014-05-07 05:40:00徐昭吳志良
船電技術 2014年11期
徐昭,吳志良
?
基于S7-1200 PLC的船舶電站并車裝置的設計與實現
徐昭,吳志良
(大連海事大學輪機工程學院,遼寧大連 116026)
針對船舶電站自動并聯運行技術的要求以及特點,設計自動準同步并車裝置。在重點論述并車信號檢測基本原理的基礎上,選用西門子公司新一代S7-1200 PLC作為核心控制器,以船舶電站物理仿真系統為實驗平臺,完成了相應的軟件編程和外圍硬件電路的設計。經實驗平臺運行驗證,該裝置完全實現了船舶電站自動準同步并車的功能且運行可靠,并車成功率高。
船舶電站 自動準同步并車 信號檢測 S7-1200 PLC 恒定超前時間
0 引言
船舶電站一般由船舶發電機組和配電盤組成,是船舶電力系統的核心。為了滿足船舶供電的可靠性和經濟性,船舶電站通常設有三或四臺同步發電機組作為主電源,規范亦要求至少設置兩臺船舶主發電機組。兩臺或兩臺以上的發電機通過公用母線向全船負荷供電,這就是通常所說的船舶發電機的并聯運行,把船舶發電機投入并聯運行的操作過程稱為并車。
隨著船舶電站自動化程度的不斷提高和微機控制技術的飛速發展,先進的數字控制式的自動并車裝置已顯示出其特有的優越性。數字控制方案除了可采用單片機、微機(工控機)作為控制核心之外,還可采用DSP(數字信號處理器)或PLC(可編程邏輯控制器)實現自動控制錯誤!未找到引用源。。
本文設計的自動并車裝置采用西門子公司新一代S7-1200 PLC作為核心控制器,具有集成的PROFINET接口、強大的集成工藝功能(如高速計數器功能、高速脈沖輸出或脈寬調制輸出PTO/PWM功能、PID功能及運動控制功能等)和靈活的可擴展性等特點,為各種工藝任務提供了簡單的通信和有效的解決方案,能滿足完全不同的自動化需求錯誤!未找到引用源。。同時S7-1200 PLC的高可靠性更加適合應用于船舶電站的惡劣工作環境。
1 自動準同步并車信號檢測的原理
將一臺發電機組投入電網并聯運行時,不能隨便將待并發電機的主開關與電網相接通,否則可能會產生較大的沖擊電流,嚴重時會造成整個船舶電力系統崩潰。所以在將待并發電機投入電網運行之前,它的某些參數必須滿足一定的要求才允許進行并車操作。
經理論和實踐證明,準同步并車的三個限制條件為錯誤!未找到引用源。:
1) 待并發電機電壓與電網電壓之差應不得大于額定電壓的10%;
2) 待并發電機頻率與電網頻率之差應嚴格限制在±1%額定頻率值以內;
3) 待并發電機電壓的初相位與電網電壓的初相位之差應限制在±15°以內。
下面將分別對電壓、頻率、相位這三個參數的采集與處理方法進行詳細論述。
1.1 電壓信號的采集與處理
到目前為止,因為船用自勵恒壓發電機的電壓都能保證在并車的允許范圍內,所以在一般情況下,都省去調壓部分,只設大電壓差閉鎖環節錯誤!未找到引用源。。
本文設計主要采用交流電壓變送器檢測電壓信號,其獲取與測量過程大致如下:首先,將待并發電機側與母排側的電壓分別經互感器降至100 V;其次,將互感器二次側的電壓信號送至電壓變送器的輸入端進行處理與轉換;最后,將電壓變送器的輸出端輸出的標準直流電壓信號經AI/AQ模塊SM 1234輸入PLC之中,從而完成電壓信號的測量。本文選用北京低壓電器廠提供的型號為CTA01的交流電壓變送器,其輸入電壓的量程為100 V,輸出形式為0~5 V的標準直流電壓信號。
為了實現大電壓差閉鎖環節,本文將PLC采集到的母排電壓信號與待并機電壓信號進行比較即可判斷出電壓差條件是否滿足要求。當PLC檢測到電壓差條件滿足要求(本文設定為小于10%U)時,則置標志位,并進入下一個條件的檢測;若不滿足,PLC將禁止發出合閘指令,并發出報警信號。
1.2 頻率信號的采集與處理
頻率信號的采集與處理是實現自動準同步并車功能的重要環節。本文設計主要采用頻率變送器檢測頻率信號,即把輸入的頻率信號變換為標準的直流電壓信號,最后送至PLC的模擬量輸入采集模塊。
根據本文所設計的系統參數,選用北京低壓電器廠提供的型號為S3-FD-450V2的頻率變送器,該頻率變送器工作方式靈活可靠,且在量程范圍內具有極高的線性度,其輸入量程為45 ~55 Hz(100 V),輸出范圍為0~5 V的標準直流電壓信號,此標準直流電壓信號經AI/AQ模塊SM 1234輸入PLC,從而完成對頻率參數的測量以及頻差的計算。
當頻率差的方向和大小不滿足并車條件時,PLC發出加速/減速控制信號,調節原動機的轉速,從而改變發電機的頻率直至滿足準同步并車的頻率差條件。當系統頻率出現異常時,PLC將禁止發出合閘指令,并發出報警信號。
1.3 相位信號的采集與處理
相位信號的采集與處理是實現自動準同步并車功能的難點和關鍵環節。在將待并發電機投入電網時,主開關的觸頭應該在相位差為零時閉合,但是考慮到主開關的固有動作時間的影響,系統必須在相位差過零之前的某一時刻就發出合閘指令,這一提前指令可以用時間來衡量。
本文采用恒定超前時間的方法來獲取提前合閘量。首先把電網的正弦波電壓和待并發電機的正弦波電壓通過波形變換電路分別變換為同頻方波,波形變換電路如圖1所示。

然后對電網和待并發電機的電壓方波U和U的邊沿進行檢測,通過測量兩方波信號對應的上升沿之間的時間差,就可以獲得提前發出合閘指令的時間
如圖2所示。

在圖2中,設電網電壓和待并發電機電壓的周期分別為T、T,待并發電機電壓滯后于電網電壓的時間為t,主開關的固有動作時間為t,若要求在同相點合閘,此時t的值是唯一的,且可以由一個以T、T和t為變量的函數關系確定,即:
具體的推導過程如下:

在已知頻差周期T
公式(3)所表達的物理意義是:已知檢測到的t,則在經過時間t后,相位角差為零,即電網電壓和待并發電機電壓的相角相等。
也就是說,若t為已知的主開關的固有動作時間,則對應的t,為:

在公式(4)中代入主開關的固有動作時間為t和T、T的值,便可計算出t的理想值t,。在程序中,不斷拿實際檢測到的t值與理想值t,相比較,當兩者非常接近時即表示滿足條件,發出合閘脈沖信號錯誤!未找到引用源。。
本文采用S7-1200 PLC中CPU自帶的高速計數器HSC6來測量時間差t,其基準脈沖時鐘信號為20 kHz。以U的上升沿觸發高速計數器清零并開始計數,當U的上升沿到來時讀出HSC6的計數值,此時得到的計數值就可以換算出t。
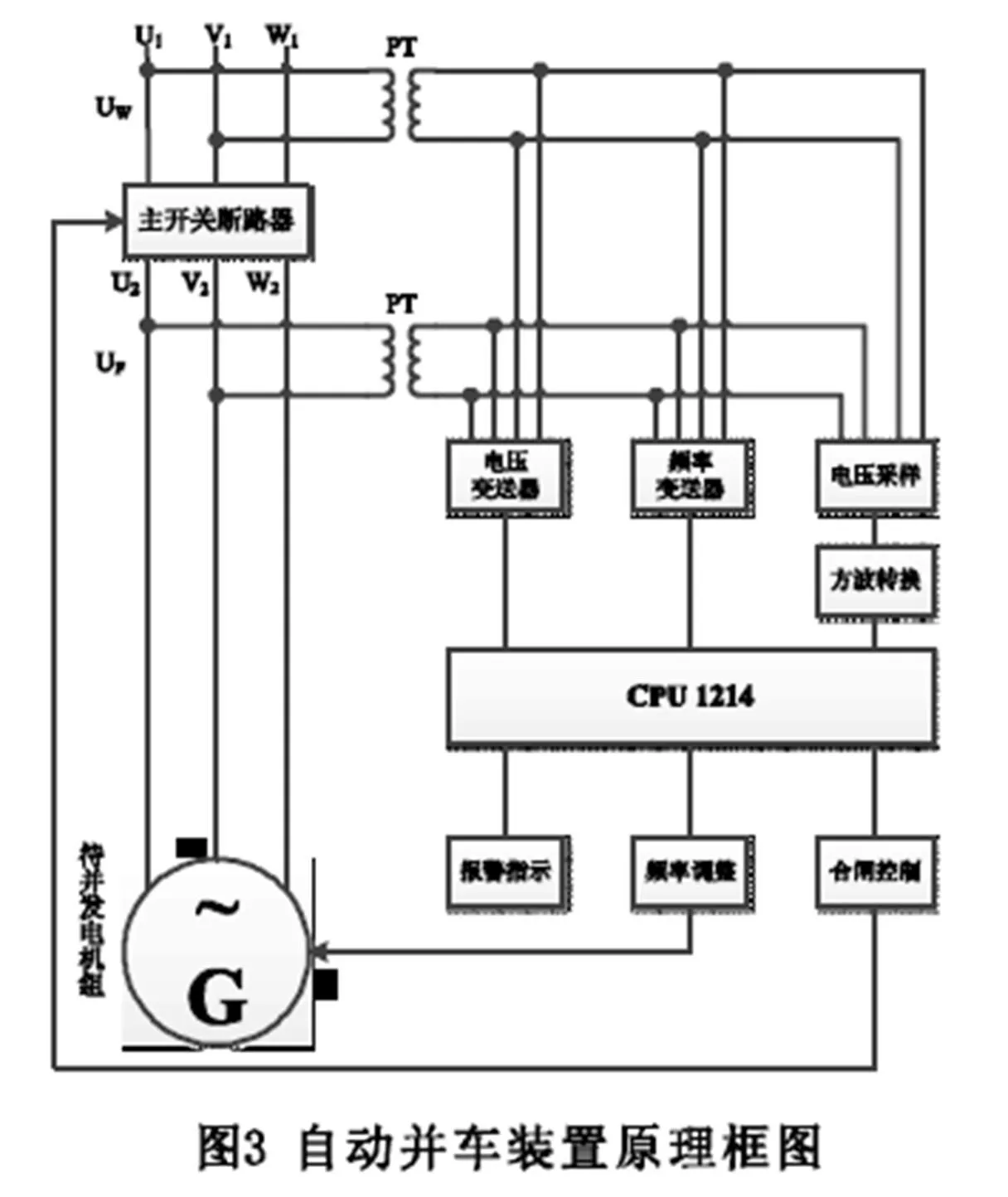
本文設計的自動并車裝置原理框圖如圖3所示。
2 系統的工作流程
本文設計的自動準同步并車裝置的工作流程如圖4所示。
1) 系統初始化后,首先檢測電壓條件是否滿足并車要求。當電壓差條件滿足要求時,程序進入下一流程,否則系統將禁止發出合閘指令,并發出報警指示;
2)檢測電網的頻率,若電網頻率偏離額定值,則將其調整到額定值;
3)需要進行并車操作時,則將進行待并發電機組的頻率檢測。為了避免并車時出現逆功的現象,提高并聯運行環節的穩定性,本文將待并機與電網的頻率差的范圍限定為+0.1~+0.25Hz;
4)最后檢測相位差條件是否滿足并車要求,按照本文前述的相位條件檢測的實現方法獲取了合閘的恒定超前時間發出合閘指令,從而完成整個系統的自動并車功能。
3 主要技術環節的實現與分析
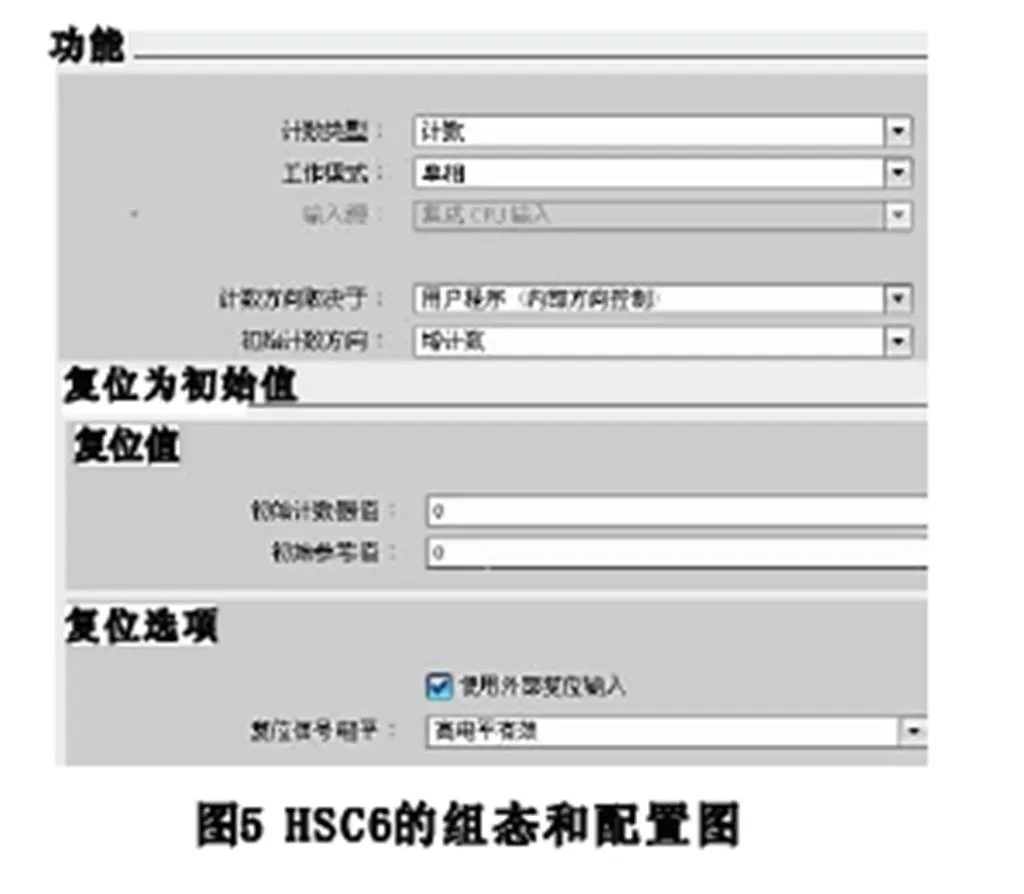
3.1 高速計數器的組態與配置
本文選取的S7-1200 PLC的CPU模塊為CPU 1214C DC/DC/DC,該模塊具有14點數字輸入和10點數字輸出,并提供了六個高速計數器(HSC1~HSC6),其獨立于CPU的掃描周期進行計數,可測量的單相脈沖頻率最高為100 kHz。經綜合考慮,本文采用高速計數器HSC6來測量恒定超前時間,其最高的計數頻率為30 kHz。HSC6的組態和配置如圖5所示。
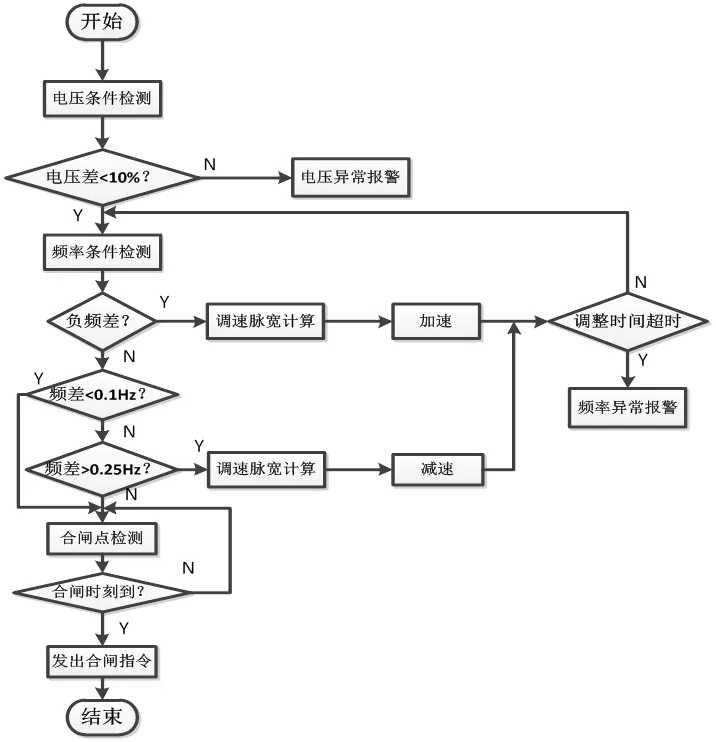
圖4 系統工作流程圖
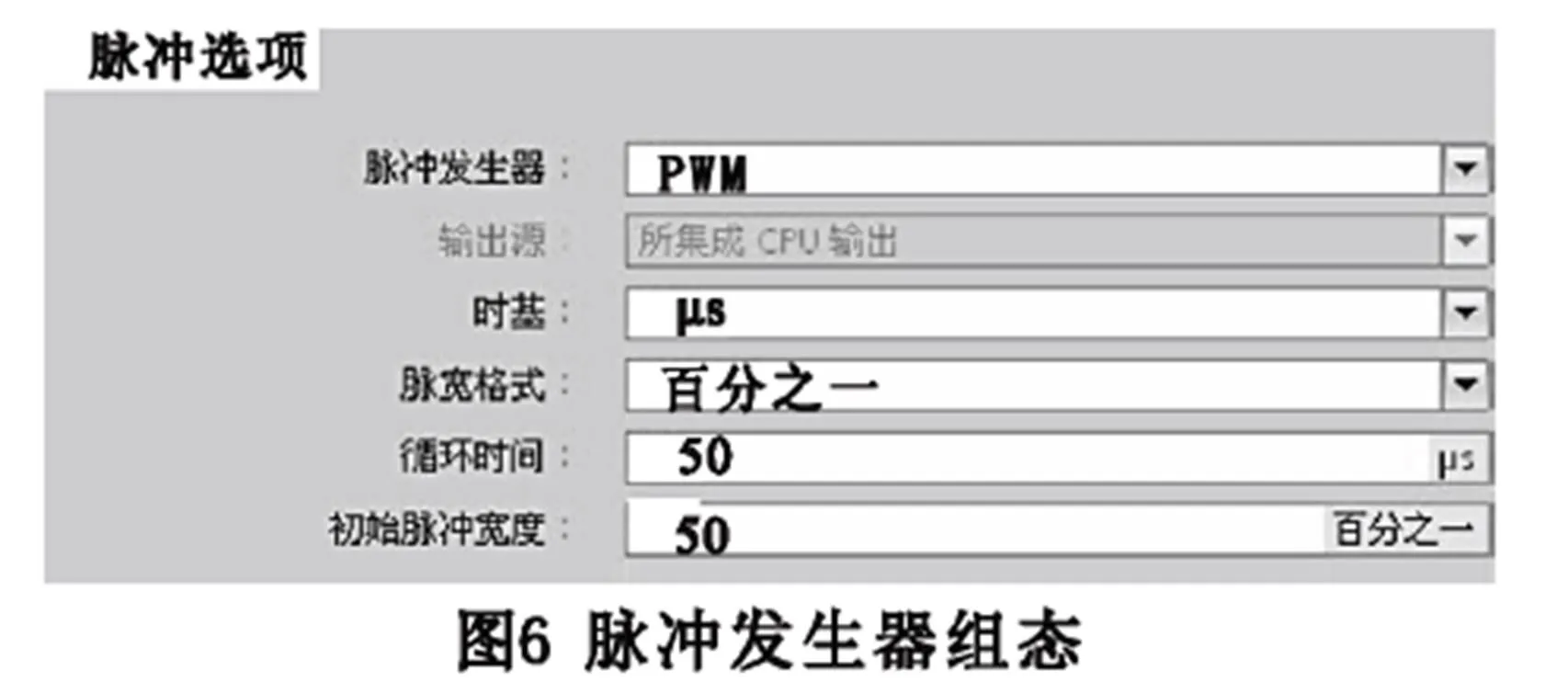
3.2 20 kHz基準脈沖時鐘信號的產生
本文選取的S7-1200 PLC的CPU模塊還集成了四個輸出通道(PTO1/PWM1~ PTO4/PWM4)用于高速脈沖輸出,分別可組態為PTO或PWM。但是,由于PTO的功能只能由運動控制指令來實現,所以本文將PTO1/PWM1組態為PWM功能用來產生20kHz的基準脈沖時鐘信號,其組態與配置如圖6所示。
但是需要注意的是,此方法產生的基準脈沖信號是雙極性的,而PLC的高數計數器只能識別單極性的脈沖信號。為了解決這一問題,本文將PLC的PWM輸出端口Q0.0輸出的基準脈沖信號經二極管濾除掉負半周部分之后再送至PLC的高速計數器HSC6的計數脈沖輸入端口I1.3。實驗結果表明,利用PLC本身輸出的基準脈沖,方法簡單方便、抗干擾能力強,其波形質量基本不受外界影響,穩定性好。
3.3 誤差分析
通常情況下,相位差是影響并車成功率的主要因素。下面將對本文設計的船舶電站自動準同步并車裝置的合閘時刻相角的誤差進行詳細分析。
S7-1200 PLC高速計數器HSC6單相的計數頻率為30 kHz,周期約為0.033 ms,即被測的時鐘信號周期不得小于0.033 ms。本裝置采用的基準脈沖時鐘信號的頻率為20 kHz,周期為0.05 ms,滿足高速計數器的計數要求。
由于高速計數器每隔0.05 ms計數一次,所以實際檢測到的t值可以表示為:
其中為與t對應的高速計數器的計數脈沖個數。
通常主開關的固有動作時間t為100 ms,頻率差(f-f)為0.25 Hz,電網頻率f為50 Hz,代入公式(4),即可算出t的理想值t,為0.5 ms。由于
由公式(6)可以看出,t與t,之間的比較可以看成是與其相對應的計數脈沖個數之間的比較。
在此部分程序中,本文設定當t與t,的差值小于0.1 ms時發出合閘指令,即|-10|<2,可得8<<12,滿足上述不等式的的值為9、10、11。則當=11時,合閘時刻的相角誤差最大,與之相對應的t的實際值為11×0.05 ms=0.55 ms,此時對應的最大相角誤差∣Δ∣=9.9°,完全滿足準同步并車的相位差條件。
4 結論
本文設計的自動準同步并車裝置在船舶電站物理仿真實驗平臺上經過了反復試驗,結果證明該裝置性能穩定、抗干擾能力強、可靠性高,與傳統的自動并車裝置相比它有著明顯的優勢,對于提高我國船舶電站的自動化水平起到了一定的借鑒作用。
[1] 吳志良.船舶電站[M].大連:大連海事大學出版社, 2012.
[2] 張春. 深入淺出西門子S7-1200PLC[M]. 北京:北京航空航天大學出版社, 2009.
[3] 廖常初. S7-1200PLC編程及應用[M]. 北京:機械工業出版社,2011.
[4] 王仁祥,王小曼. 西門子S7-1200PLC編程方法與工程應用[M]. 北京:中國電力出版社,2011.
[5] 黃麗卿.基于PLC的船舶電站自動頻載調節裝置研究與實現(碩士學位論文)[D]. 廈門:廈門大學, 2007.
[6] 楊國豪,王恒,華增芳等. PLC船舶電站自動準同步并車裝置[J]. 航海技術, 2000,(5):49-51.
Design of Automatic Parallel Operation Set for Marine Power Station Based on S7-1200 PLC
Xu Zhao, Wu Zhiliang
(Marine Engineering College,Dalian Maritime University,Dalian 116026,Liaoning , China)
U665
A
1003-4862(2014)11-0048-04
2014-09-13
徐昭(1989-),男,碩士研究生。研究方向:船舶電力系統。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
電子制作(2018年11期)2018-08-04 03:25:42
大電機技術(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
電力工程技術(2014年1期)2014-03-20 14:19:06
