基于RTLAB&MATLAB的三相異步電機矢量控制系統在回路仿真研究
2014-05-07 01:29:30劉君胡傳西
船電技術 2014年2期
關鍵詞:系統
劉君,胡傳西
基于RTLAB&MATLAB的三相異步電機矢量控制系統在回路仿真研究
劉君,胡傳西
(武漢船用電力推進裝置研究所, 武漢 430064)
本文建立了三相異步電機矢量控制數學模型,利用MATLAB仿真工具和RTLAB半實物仿真平臺搭建了三相異步電機硬件在回路矢量控制系統,并將該仿真系統移植到實際變頻驅動系統上,半實物仿真與試驗結果基本吻合,驗證了半實物仿真模型準確,半實物仿真移植到實際系統可行、便利,該仿真研究方法可應用到產品開發和科研中,具有應用價值。
RTLAB MATLAB 異步電機矢量控制
0 引言
目前,電力電子仿真多為離線的,雖精度高,收斂性好,成本低,但速度慢成為其致命弱點,且仿真效果取決于模型質量。而使用實物實驗則受硬件設備及環境等因素的影響,成本過高,且難以模擬一些極限工況,應用受到限制。另一方面,為縮短開發時間往往并行設計開發,控制器與被控設備同時研制,這就要求在原型物理樣機尚不具備的情況下實時實驗,把實物系統放置在計算機仿真環節中進行仿真研究即半實物仿真可以解決上述問題。半實物仿真典型應用:1)將實際逆變器—電機—傳感器代之以其實時模型,與實際控制器構成閉環測試系統。該系統回路中具有實際控制計算機及接口硬件,因而稱為硬件在回路;2)快速控制原形,采用控制器實時模型與實際電機系統構成閉環控制回路,實現控制系統快速生成。RT-LAB是加拿大一家Opal-RT Technologies公司推出的針對電機控制系統進行分析、測試的半實物仿真系統。將Matlab/Simulink或MATRIXx/SystemBuild 建立的動態系統數學模型直接應用于仿真,控制,測試以及其它相關領域,實現電機控制系統的設計,實時仿真,快速原型與硬件在回路測試的全套解決方案。本課題即是基于RT-LAB和MATLAB,搭建了三相異步電機矢量控制系統半實物仿真試驗平臺,實時仿真及試驗結果證明了該仿真平臺可達到高精度、快速響應及很高的系統穩定性。
1 三相異步電機矢量控制原理及數學模型
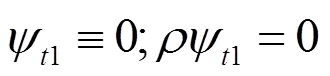
三相異步電機經坐標變換,將旋轉坐標軸軸定義在轉子旋轉磁場上,記為MT坐標軸。記θ為旋轉坐標軸M軸與定子相軸線的夾角,則有
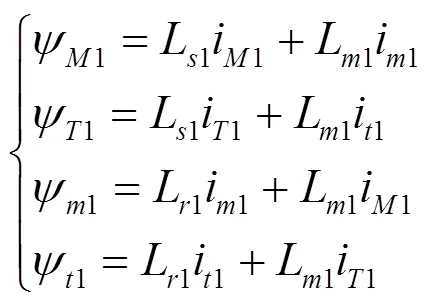
磁鏈方程為:
電磁轉矩為:
電壓方程為:
由以上推導公式可知:三相異步電機經(MT)坐標變換后轉化為解耦的直流量。通過對轉子磁鏈的閉環控制,保證轉子磁鏈大小恒定,通過調節轉矩電流大小來調節轉速。
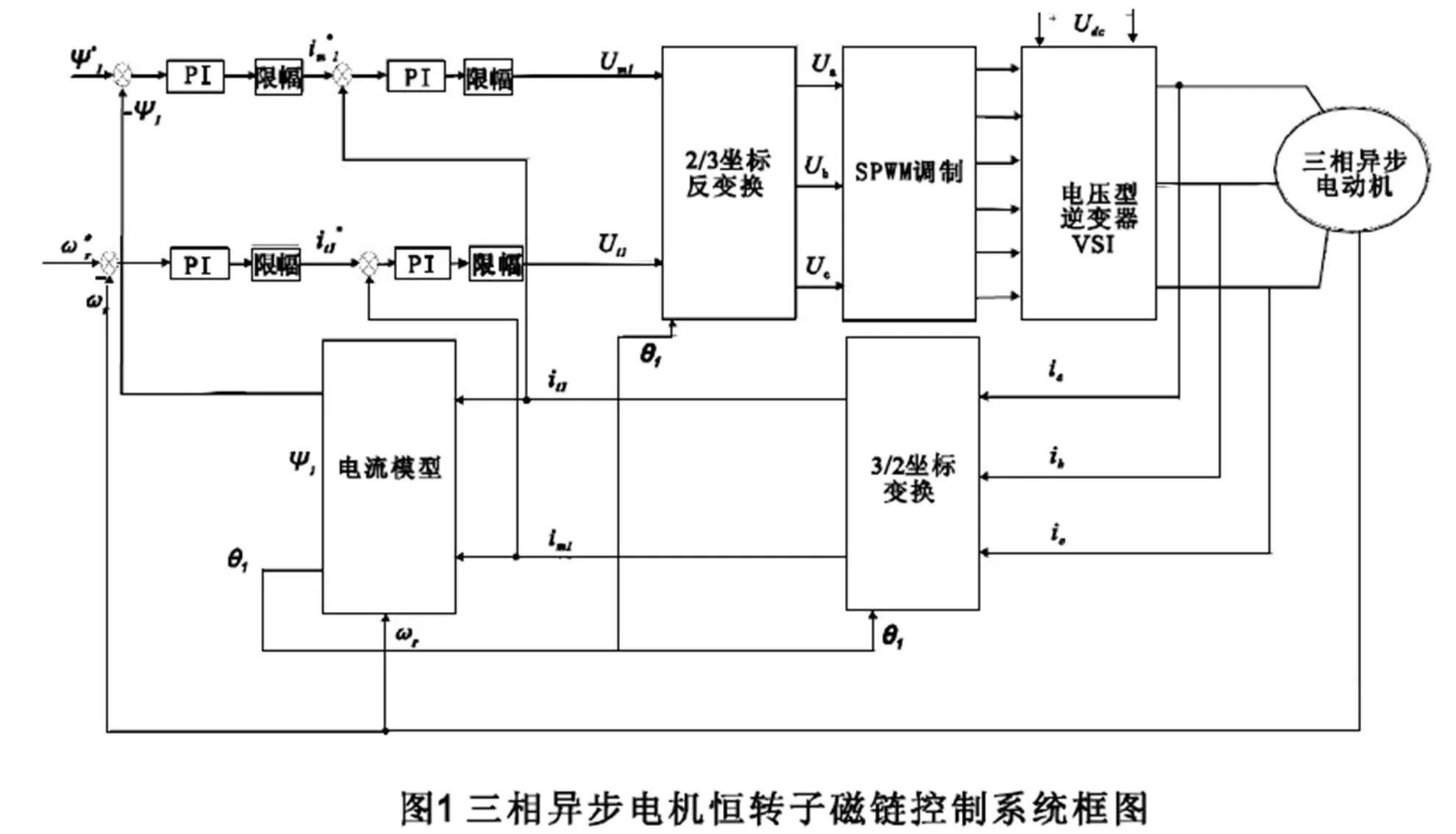
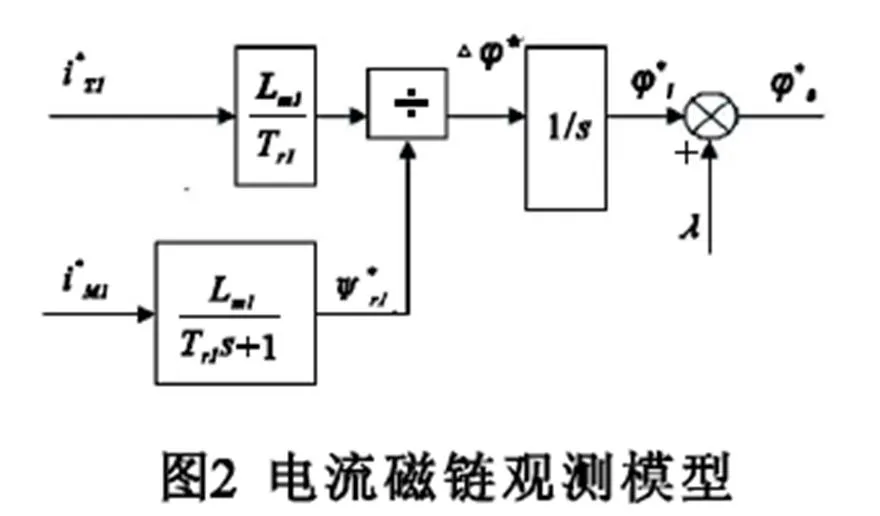
三相異步電機矢量控制模型如圖1所示。電機電流模型如下:
其中,帶*為給定值。 電流磁鏈觀測模型框圖如圖2所示。
2 試驗平臺搭建及控制軟件設計
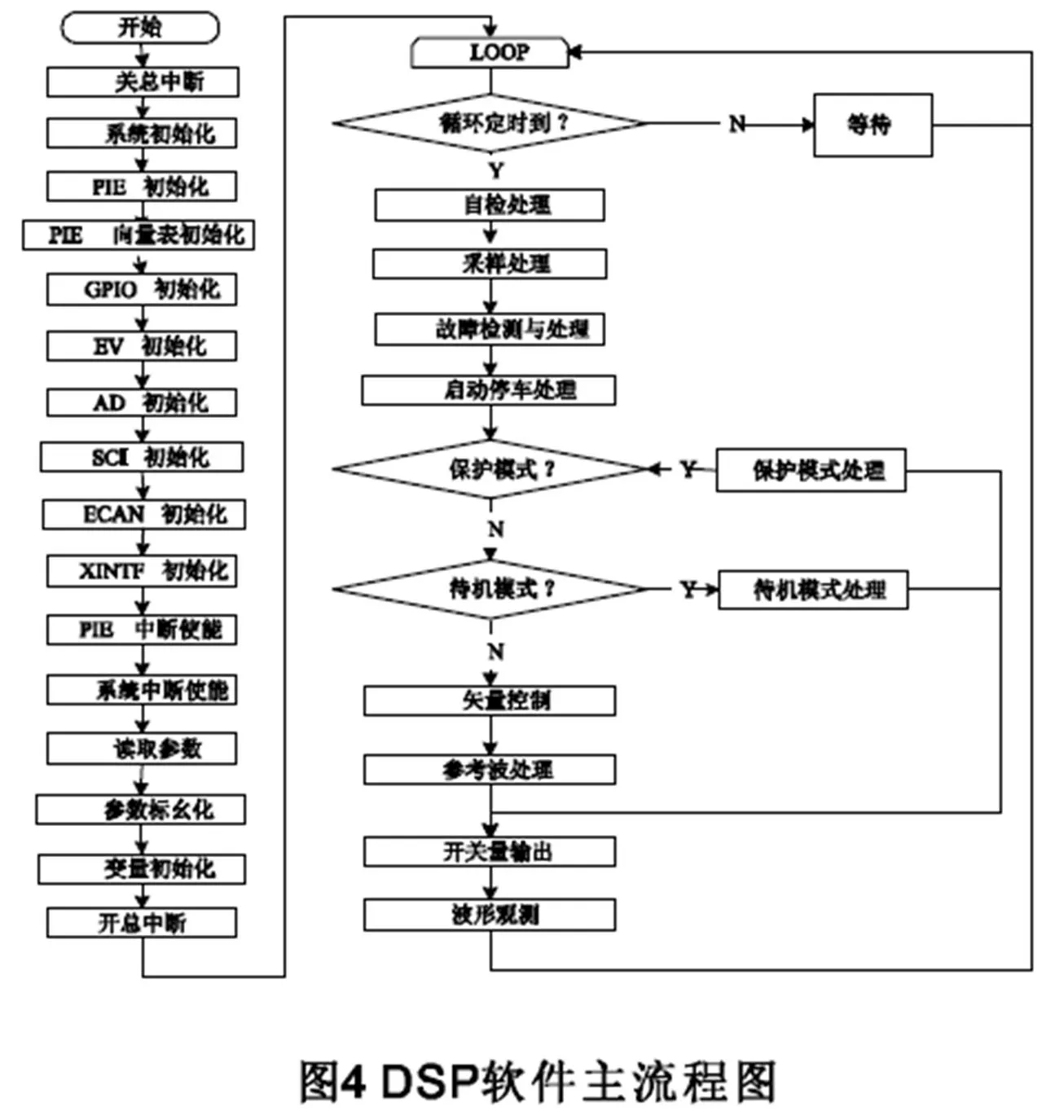
基于電力電子系統硬件在回路半實物仿真試驗平臺示意圖如圖4、圖5所示,由DSP核心板,接口驅動與調理電路,EMEGASIM實時仿真平臺組成。調理電路用差分運放、跟隨、濾波實現,脈沖驅動用電平轉換芯片和光耦完成。
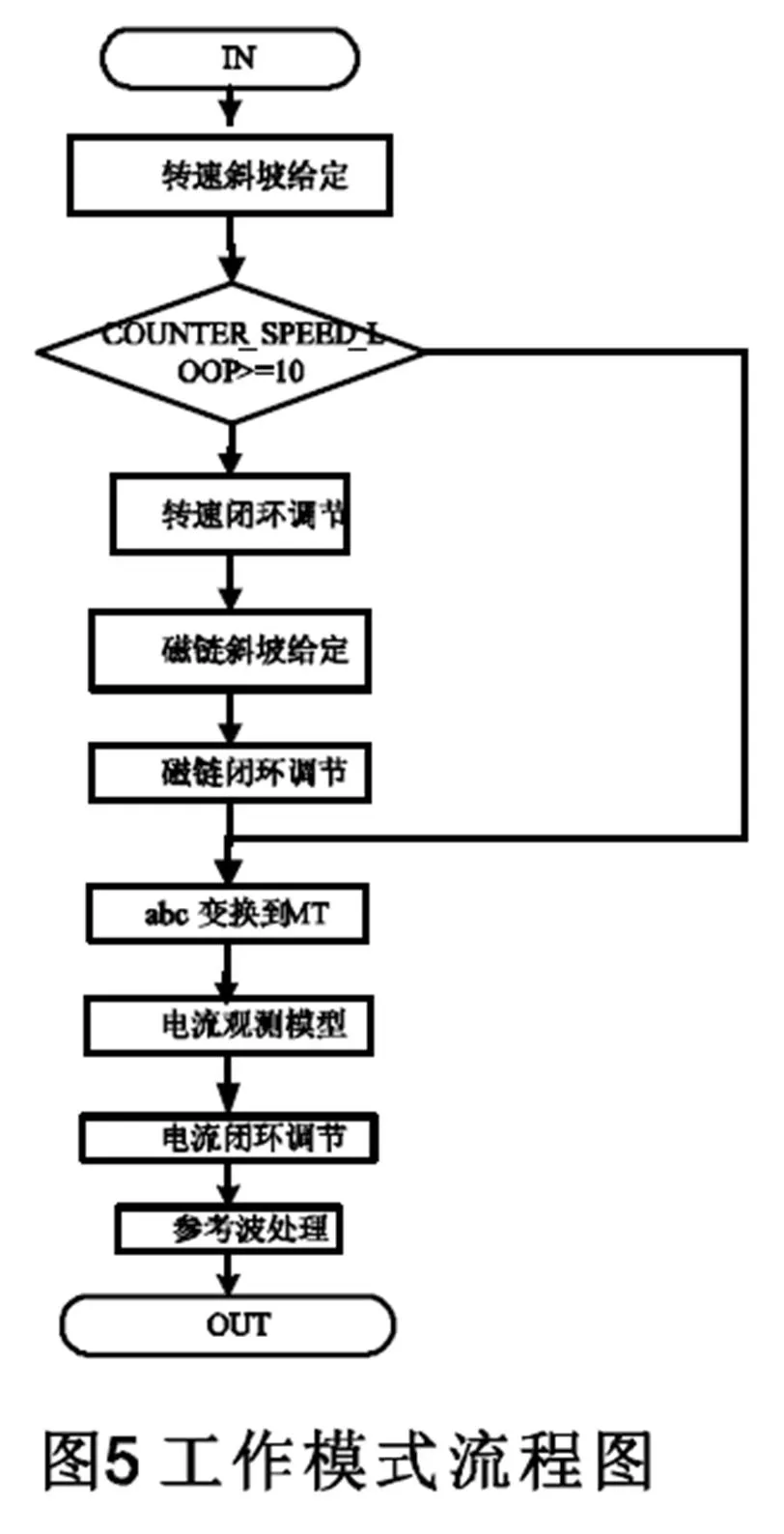
程序中采用恒轉子磁鏈定向控制的控制策略,載波頻率固定為2 kHz,可以實現調制波頻率1~50 Hz變頻功能、死區功能、過流、過壓檢測保護功能等。DSP晶振為30 MHz,內部5倍頻,時鐘頻率為150 MHz。死區時間為4 μs。T1定時器設置開關頻率2 kHz,T2定時器用作轉速檢測,T4定時器設置程序循環周期0.5 ms,程序中用到三個中斷,包括:外部中斷1、AD中斷,串口中斷。其中,外部中斷1為硬件故障中斷,一旦有故障,程序馬上封鎖PWM脈沖;AD中斷用于采樣;串口中斷用于接收啟動停機、界面參數等信息。DSP軟件主流程圖及正常工作模式流程圖如6,7所示。
3 實時仿真及試驗結果
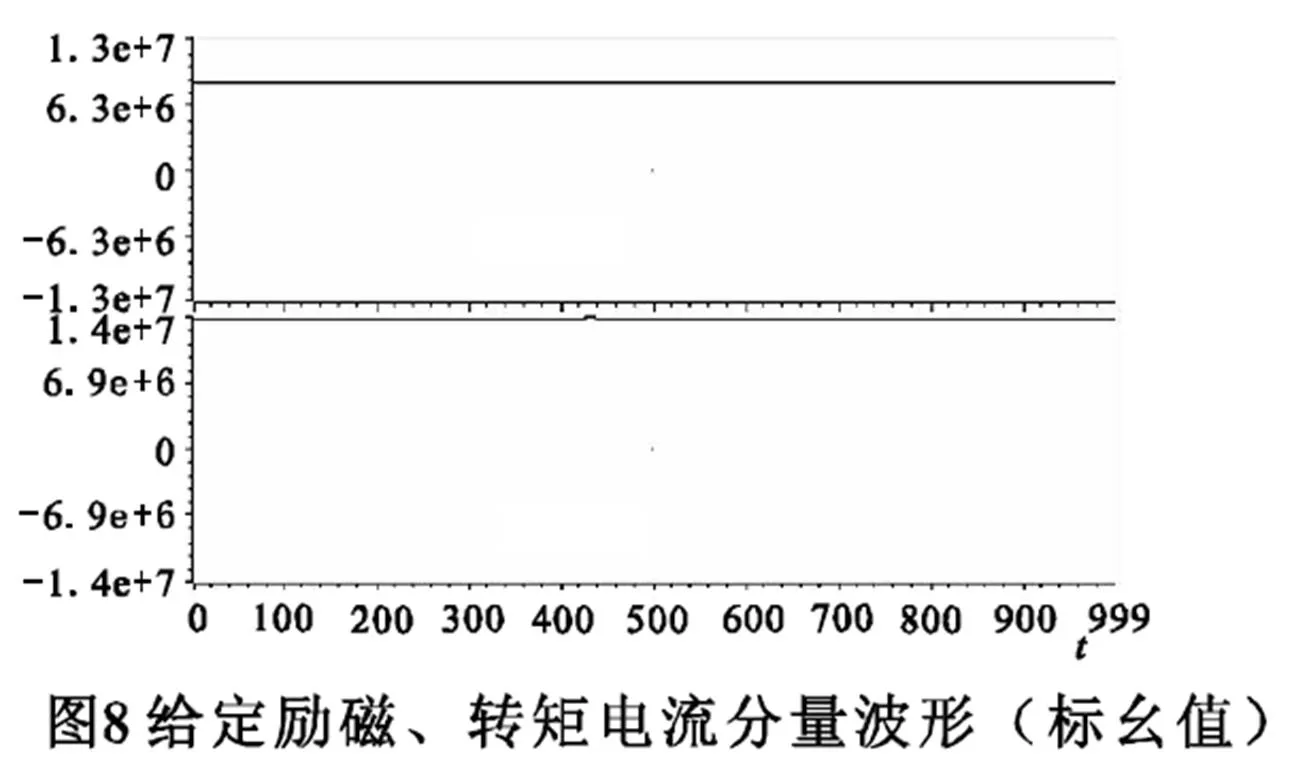
該仿真按照真實需求設置參數,最小脈寬時間5 μs,死區時間4.266 μs,載波周期2 kHz,電流環運行周期0.5 ms,轉速環運行周期2.5 ms;電機、主回路、PWM采集模塊運行周期35 μs,其中PWM采集模塊通過對采樣周期內的事件補償,可達到微妙級精度。滿負載時,按啟動開關0.5 s后旁路預充電單元,電機帶載啟動到額定轉速1500 RPM(對應額定負載)。
4 結果分析及結論
仿真及實驗結果分析:空載、帶載時定子電壓、電流幅值、頻率比較穩定;空載和帶載時電機轉子磁鏈保持不變;磁鏈閉環控制達到保證轉子磁鏈恒定目標;空載、帶載時電機均能穩定運行在給定轉速。由此可見,本文搭建的基于RTLAB&MATLAB半實物仿真平臺不但具有很高的精度,且能夠模擬實時工況,仿真結果更貼近實際,研究結果具有一定的應用價值。
[1] 劉寶柱,蘇彥華,張宏林.MATLAB7.0從入門到精通. 人民郵電出版社, 2010.
[2] 郭新,馮麗輝,陳顯寧. 交流異步電動機全數字矢量控制方法的實現. 四川大學學報自然科學版, 2004, (10):317-321.
[3] Kuo BC etc. MATLAB tools for control system analysis and design. Engle wood cliffs: Prentice Hall,1993.
[4] 賈建強. 基于MATLAB/SIMULINK的交流電機調速系統建模與仿真. 電機與控制學報, 2000, (4) :91-93.
[5] Chen Shaotang. Medeling of motor meaning currents in PWM inverter drives. IEEE TRANK, 1996, 32(6).11-16.
Hardware-in-the -loop Simulation of Three-phase Asynchronous Motor Vector Control Based on RTLAB&MATLAB
Liu Jun, Hu Chuanxi
(Wuhan Institute of Marine Electric Propulsion, Wuhan 430064, China)
TM343
A
1003-4862(2014)02-0021-03
2013-03-05
劉君(1984-),女,工程師,碩士。研究方向:艦船電力推進系統。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32