薄煤層采煤機自動化控制技術(shù)與實踐
2014-04-20 01:40:58劉占飛
中國煤炭 2014年8期
劉占飛
(1.太原理工大學(xué)電氣與動力工程學(xué)院,山西省太原市,030024;2.大同煤礦集團有限責(zé)任公司四臺礦,山西省大同市,037007)
為了實現(xiàn)對薄煤層綜采工作面的自動化控制開采,以減輕工人的勞動強度,提高工作面的工作實效和工作面作業(yè)的安全性,除了實現(xiàn)液壓支架的自動化控制以外,采煤機的自動化控制也是其技術(shù)關(guān)鍵;運輸巷的集中控制以及采煤機與運輸巷控制設(shè)備的數(shù)據(jù)通訊,遠(yuǎn)程控制又是其技術(shù)關(guān)鍵。大同煤礦集團公司四臺礦在煤層厚度為1.0~1.72 m 的薄煤層綜采工作面進(jìn)行了自動化開采的試驗,重點對采煤機的自動化控制技術(shù)、運輸巷集中控制技術(shù)以及工作面生產(chǎn)技術(shù)進(jìn)行了大膽的嘗試,取得了較好的效果,同時也積累了一定的自動化開采經(jīng)驗,為推進(jìn)我國薄煤層自動化開采技術(shù)進(jìn)步做出了有益的貢獻(xiàn)。
1 采煤機的自動化控制技術(shù)
為了實現(xiàn)采煤機在薄煤層開采中的自動化控制,采煤機與煤層間的姿態(tài)、自身的形態(tài)、工作面的位置關(guān)系、自身牽引速度以及各種保護等是實現(xiàn)自動化控制過程中作為一個執(zhí)行設(shè)備必須要解決的問題。
1.1 采煤機的姿態(tài)及形態(tài)控制技術(shù)
采煤機的姿態(tài)及形態(tài)控制技術(shù)見圖1。
由圖1可以看出,要確定采煤機的姿態(tài),需要在地球參照系中測得沿工作面傾向方向的仰角 (或俯角)β和沿工作面走向的傾角γ,繞鉛垂方向的旋轉(zhuǎn)角度則可以由液壓支架電液控制系統(tǒng)保持刮板輸送機為直線,可保證輸送機及采煤機與工作面平行。為此,在采煤機電控箱內(nèi)部安裝有兩軸陀螺儀,可以檢測到采煤機機身的仰角 (或俯角)β以及傾角γ,作為采煤機機身姿態(tài)的控制參數(shù)。由圖1 (a)可以看出,當(dāng)確定了采煤機機身的姿態(tài)參數(shù)后,要想實現(xiàn)滾筒回轉(zhuǎn)中心位置的控制,還必須確定搖臂相對于機身坐標(biāo)系的角度α1和α2,為此在左右搖臂與采煤機機身連接處各裝一個角度傳感器,用于檢測搖臂相對于采煤機機身的角度α1和α2,以此通過采煤機的幾何參數(shù)計算出滾筒的位置和各特殊點的位置,從而可求出采煤機的采高和臥底量,作為采煤機形態(tài)的控制參數(shù)。

圖1 采煤機的姿態(tài)及形態(tài)控制技術(shù)
1.2 采煤機的位置控制技術(shù)
利用液壓支架電液控制系統(tǒng)中推移千斤頂?shù)男谐虃鞲衅鳎梢詫崿F(xiàn)對刮板輸送機和采煤機沿工作面走向方向的進(jìn)刀量和直線的控制。
采煤機沿工作面傾向方向的位置控制是采煤機牽引行走的關(guān)鍵控制技術(shù),為了能夠準(zhǔn)確地反映采煤機在工作面傾向方向的位置,從而對采煤機的啟動→行走→增速→減速→停止→反向等一系列動作進(jìn)行有效地控制,在采煤機牽引電機軸上安裝多圈旋轉(zhuǎn)傳感器,用以測量牽引電動機的旋轉(zhuǎn)圈數(shù)。由于減速器、鏈輪和銷排傳動為剛性傳動,可計算出采煤機到初始點間的距離,用于確定采煤機在工作面的位置。根據(jù)一定時間段采集到的距離差,可得到采煤機當(dāng)前的牽引速度。根據(jù)至初始點的距離和速度,可以作為采煤機位置、速度和正、反向的控制參數(shù)。
1.3 采煤機的牽引控制技術(shù)
電牽引采煤機使用交流變頻器牽引,在牽引過程中可以根據(jù)采煤機和刮板輸送機的負(fù)載情況進(jìn)行自動調(diào)速,一方面根據(jù)采煤機截割電機電流反應(yīng)的截割負(fù)載進(jìn)行加減速;另一方面可以根據(jù)刮板輸送機的負(fù)載電流進(jìn)行加減速。當(dāng)采煤機截割電機的電流達(dá)到最大設(shè)定值時自動減速;當(dāng)?shù)陀谧畹驮O(shè)定值時自動加速,這有利于發(fā)揮采煤機的割煤效率。當(dāng)刮板輸送機負(fù)載電流達(dá)到最大設(shè)定值時,采煤機牽引自動減速;當(dāng)刮板輸送機負(fù)載電流低于最小設(shè)定值時,采煤機牽引自動加速,這樣有利于提高刮板機的輸送效率。
1.4 采煤機自動化控制保護技術(shù)
為了有效地實現(xiàn)采煤機割煤的自動化控制,必不可少的重要保護內(nèi)容有:
(1)工作面瓦斯?jié)舛仁亲詣踊刂频陌踩U希鶕?jù)工作面瓦斯涌出量設(shè)定工作面允許瓦斯?jié)舛鹊姆秶?dāng)工作面瓦斯?jié)舛仍谠O(shè)定范圍內(nèi)可正常割煤;當(dāng)瓦斯?jié)舛冗_(dá)到上限時采煤機要自動停機。
(2)與工作面開采情況相關(guān)的還有一些其它重要保護及控制參數(shù),如工作面長度、支架總數(shù)、最大采高、最小采高、最大臥底量、采煤機極限牽引速度、采煤機截割電機、牽引電機、油泵電機保護以及采煤機的其它保護等。
以上各種保護都是實現(xiàn)工作面自動化的重要控制參數(shù),既可以在采煤機上進(jìn)行保護,又可以對外傳輸有關(guān)信息,采煤機還可以接收相關(guān)信息,進(jìn)行自動化執(zhí)行。
2 采煤機的自動化集中控制技術(shù)
為了實現(xiàn)采煤機在運輸巷中的集中控制,首先要使采煤機的各種設(shè)定參數(shù)、運行參數(shù)、命令執(zhí)行情況及故障狀態(tài)必須全部傳輸至工作面運輸巷的集中控制中心;其次,集中控制中心所發(fā)送的各種指令可以傳輸至采煤機,采煤機可以自動執(zhí)行;第三,采煤機在工作面的工作狀態(tài)必須在集中控制中心可視化;第四,采煤機的調(diào)整可以在集中控制中心人工干預(yù),及時對采煤機做出調(diào)整,實現(xiàn)對采煤機的有效管理。
2.1 通訊與顯示技術(shù)
采煤機與集控中心的通訊方式見圖2。

圖2 采煤機與集控中心的通訊方式
由圖2可見,運輸巷集控中心由BHG-400/3.3-2G 礦用隔爆型電纜接線箱、KXJ127礦用隔爆兼本質(zhì)安全型控制箱和ROM1本質(zhì)安全型操作臺組成。控制箱中具有載波通訊、顯示和按鈕操作等功能,其中15寸顯示屏顯示采煤機的工作狀態(tài),LED 顯示屏顯示采煤機的工作參數(shù)及故障狀態(tài),按鈕可以實現(xiàn)采煤機的參數(shù)設(shè)定。操作臺可以對采煤機進(jìn)行各種控制,LED 顯示屏可以對各種操作命令執(zhí)行情況進(jìn)行指示。KXJ127控制箱可以與采煤機內(nèi)裝的遠(yuǎn)程通訊控制器通過動力載波進(jìn)行雙向通訊,也可以通過以太網(wǎng)向上位機上傳有關(guān)信息。
2.2 視頻監(jiān)視技術(shù)
為了實現(xiàn)采煤機集中控制,在截割過程中必不可少地要進(jìn)行人工干預(yù),所以采煤機的工作狀態(tài)必須在集中控制中心可視化,為此在采煤機與集中控制中心研制了采煤機視頻監(jiān)視系統(tǒng),在采煤機機身前后各安裝了高清晰度的攝像頭、照明和自動清洗裝置,可以監(jiān)視前后滾筒的割煤狀態(tài)和頂?shù)装迩闆r。采煤機所取得的視頻信號,通過工作面工業(yè)以太網(wǎng)傳輸至集中控制中心的視頻顯示器上,便于由人工通過視頻監(jiān)視采煤機工作狀態(tài)以及煤巖分界等情況。
2.3 采煤機運輸巷集中控制技術(shù)
采煤機割煤控制功能分為手動模式和自動模式。當(dāng)采煤機處于手動模式時,采煤機接收人工操作指令,通過采煤機的按鈕、機載端頭站、無線遙控器以及遠(yuǎn)程控制器對采煤機進(jìn)行人工控制,等同于正常工人操作采煤機進(jìn)行作業(yè)。當(dāng)采煤機割煤控制功能處于自動模式時,可以實現(xiàn)記憶割煤。首先,由司機操縱采煤機沿工作面割一刀煤,此時采煤機自動記錄了采煤機的姿態(tài)、形態(tài)、位置、牽引以及左右搖臂相對于采煤機機身坐標(biāo)系的角度等各種參數(shù),并且存入計算機,作為下一刀割煤的參數(shù)依據(jù),實現(xiàn)參數(shù)自動采集的記憶割煤;其次,如果工作中煤層條件發(fā)生變化,可以通過采煤機的視頻監(jiān)視系統(tǒng)及時發(fā)現(xiàn)并進(jìn)行人工干預(yù),人工實時在線調(diào)整采煤機割煤參數(shù),該參數(shù)經(jīng)采煤機存儲后替代原自動采集參數(shù),作為下一刀割煤的參數(shù)依據(jù),實現(xiàn)參數(shù)可在線調(diào)整的記憶割煤。
3 井下生產(chǎn)實踐
3.1 工作面地質(zhì)情況
大同煤礦集團公司四臺礦12#煤層402輔助盤區(qū)8213工作面,煤層為北面高、南東低的單傾斜構(gòu)造,煤層厚度為1.0~1.72 m,平均厚度為1.65m,傾角為1.2°~6°,平均傾角為3.6°,工作面傾向長度為118 m,走向長度為330.5 mm,工業(yè)儲量為8.36萬t,可采儲量7.94萬t。煤層直接頂為細(xì)砂巖粉巖互層,平均厚度為7.32 m,淺灰色礦物成份,主要以石英石為主,其次為長石,具水平層理,較平整。底板直接底為粉砂巖,平均厚度為4.12m,灰白色,光滑細(xì)膩,具節(jié)理構(gòu)造,較平整。
3.2 工作面配套設(shè)備
8213工作面配套設(shè)備情況見表1。
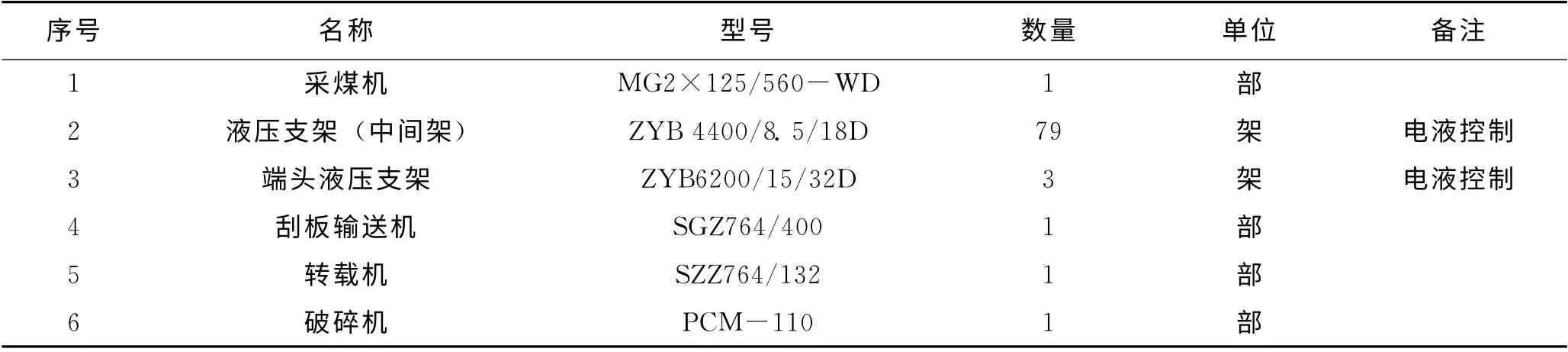
表1 8213工作面設(shè)備配套情況表
3.3 使用情況
2012年2月完成了工作面設(shè)備的整體配套設(shè)計,2012年9月在生產(chǎn)車間進(jìn)行了地面試裝、調(diào)試和聯(lián)合運轉(zhuǎn),2013年7月進(jìn)行井下安裝調(diào)試,9月正式投入生產(chǎn)運行。綜采隊全員28 人,采用“兩班”制作業(yè),一班回采,一班準(zhǔn)備。驗證了采煤機在姿態(tài)、形態(tài)、位置、牽引、設(shè)定參數(shù)、運行參數(shù)、命令執(zhí)行和故障狀態(tài)等控制技術(shù)以及采煤機與集中控制中心的通訊、顯示、視頻監(jiān)視和人工干預(yù)的實踐技術(shù)的可行性,驗證了遠(yuǎn)程自動化操作控制和記憶割煤技術(shù)在生產(chǎn)過程中的應(yīng)用,并盡可能地使用自動化控制技術(shù),達(dá)到了低煤層工作面減少人員的應(yīng)用效果。
4 自動化工作面技術(shù)發(fā)展建議
4.1 煤巖識別控制技術(shù)
對采煤機在割煤過程中的煤巖識別還可進(jìn)一步探索,通過截割滾筒電機電流沖擊的變化率,對應(yīng)判斷滾筒是否對底板和頂板巖層進(jìn)行截割,參與采煤機的自動化控制,并且對采煤機也是重要的保護。
4.2 人工輔助控制技術(shù)
為了保持工作面達(dá)到 “三直兩平”,即煤壁直、刮板機直、支架直、頂板平和底板平,采煤機在割煤過程中,工作面設(shè)備總有可能出現(xiàn)一些故障,完全有可能因其它設(shè)備某一環(huán)節(jié)的故障而影響采煤機的自動化集中控制,所以整個工作面人工干預(yù)是必不可少的。
4.3 關(guān)于控制系統(tǒng)運行可靠性的建議
采煤機自動控制系統(tǒng)和巷道集中控制中心控制設(shè)備和其它自動化控制設(shè)備的可靠性仍然是實現(xiàn)工作面自動化控制的技術(shù)核心,有待進(jìn)一步提升。
[1] 成光星,申龍.薄煤層綜采自動化采煤工藝技術(shù)研究與應(yīng)用 [J].中國煤炭,2009 (9)
[2] 李太連.對煤礦安全高效綜采成套裝備研發(fā)的思考[J].中國煤炭,2007 (6)
[3] 郭建軍,馬曉燕.360 m 綜采工作面開采技術(shù)與研究 [J].中國煤炭,2009 (4)
猜你喜歡
防爆電機(2022年1期)2022-02-16 01:14:06
河北畫報(2021年2期)2021-05-25 02:07:50
建材發(fā)展導(dǎo)向(2019年13期)2019-08-24 06:37:40
電子制作(2019年7期)2019-04-25 13:16:50
上海大中型電機(2017年4期)2017-02-06 05:27:06
山西大同大學(xué)學(xué)報(自然科學(xué)版)(2016年2期)2016-12-12 03:19:28
照明工程學(xué)報(2016年3期)2016-06-01 12:17:56
電測與儀表(2014年1期)2014-04-04 12:00:32
河南科技(2014年18期)2014-02-27 14:14:58
河南科技(2014年4期)2014-02-27 14:07:18