電動變槳系統超級電容后備電源測試裝置設計
2014-04-12 08:18:40沈鑫,田煒,魯斌,劉劍
電力工程技術 2014年3期
關鍵詞:系統
沈 鑫,田 煒,魯 斌,劉 劍
(國電南瑞科技股份有限公司,江蘇南京210003)
隨著風力機大型化的發展,風力發電技術取得了很大的進步,其中變槳距控制是國際主流風力機組的關鍵技術。電動變槳距系統作為大型風電機組的核心部分對機組安全、穩定、高效的運行有十分重要的作用[1,2],該系統以伺服控制器控制電機驅動齒輪實現變槳距調節,每個槳葉由單獨的伺服控制器來控制,這樣可以使3個葉片獨立實現變槳距[3]。基于變槳系統對風機安全運行的重要性,變槳系統通常都配有后備電源,當出現電網供電中斷時,變槳系統可自動切換到后備電源供電,并順槳停機,確保風機的安全運行[4]。由此可見后備電源是否滿足順槳要求,是否有足夠的能量保證安全順槳,是風力發電機組安全方面的核心問題之一。論文目的在于提供一種電動變槳系統的后備電源測試裝置設計方案,無需上塔架測試就能方便可靠測試所使用的后備電源是否滿足要求,進而保證風力發電機組的安全運行。
1 后備電源工作原理
正常運行時,變槳系統以電網供電作為動力電源,變槳控制器通過某種通信方式接受來自主控的角度、速度等控制指令,并發出控制指令給伺服驅動器;伺服驅動器收到控制指令后驅動變槳電機,從而帶動葉片變換角度,并將槳葉角度、變槳速度等信號實時反饋給控制器,實現高精度實時變槳[5]。
軸柜中的的充電器輪流對3個電池柜充電,當變槳系統有故障或電網供電因故中斷時,變槳系統自動切換至后備電源供電,同時啟動緊急順槳,將槳葉關至限位開關處,并將變槳系統電網供電中斷故障反饋給主控系統,主控系統根據故障反饋采取相應安全措施,確保風電機組的安全可靠運行[5]。
2 后備電源測試裝置設計
整個后備電源變槳系統的測試裝置如圖1所示。
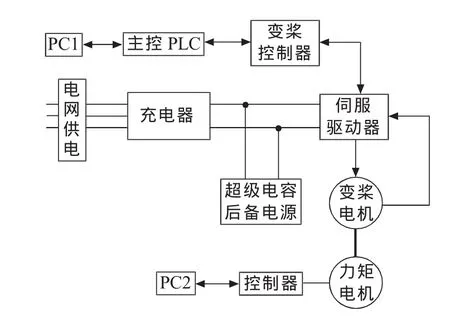
圖1 超級電容后備電源測試裝置
PC1與主控PLC連接,通過上位機軟件及時向變槳控制器發出槳葉角度和變槳速度等指令,變槳控制器接受到這些指令后向伺服驅動器發出同樣的指令,而伺服驅動器則直接驅動變槳電機按照該指令進行變槳,同時變槳電機上面的編碼器則將角度、速度狀況反饋給伺服驅動器,實現了實時高精度的變槳。
當整個變槳系統合上開關開始啟動時,電網AC400 V供電給充電器,充電器有兩個作用,一是給超級電容后備電源充電,保證后備電源的電壓達到穩定值;二是正常運行時,給伺服驅動器供電,保證變槳的順利進行。
該測試裝置設計中,變槳電機為異步電機,工作于位置閉環狀態,用來控制整個測試平臺的轉速,實現位置跟蹤。力矩電機為永磁同步電機,PC2與控制器連接,通過上位機界面施加特定力矩,力矩電機工作于轉矩閉環狀態,通過控制電機的電流給定來改變負載電機的轉矩大小,進而模擬變槳電機的負載變化。
3 利用裝置測試分析超級電容
基于上述設計方案,以某型號的2 MW超級電容后備電源電動變槳系統為例,測試其放電特性,評估該裝置能否滿足測試需要。測試所用超級電容部分參數:超級電容模組參數75 V,30 F;超級電容數量3個;采用并聯連接方式;連接后電壓75 V;連接后電容90 F。變槳電機部分參數:電機型號G1602500;額定轉速1500 r/m;額定力矩 82 N·m;抱閘力矩 112 N·m;額定功率6 kW;額定電流135 A;額定電壓75 V。
3.1 放電測試
使用充電器對超級電容充電,充電完成后斷掉外接電源,使用上位機界面發送電機運動指令,可指定電機運動范圍。采用電機放電消耗能量的方式測試超級電容的放電能力,根據電容特性,超級電容釋放一半儲能時其電壓約為額定電壓的0.707倍,電壓下降到額定電壓的一半時,儲能釋放3/4。超級電容放電測試條件及結果如下。
(1)首先將電機運動范圍設置為60~75°,通過PC2的上位機軟件界面將施加力矩設置為30 N·m,電機額定轉速為1500 r/min。在小角度范圍里測試電機的運行以及釋放能量收槳情況如圖2所示。
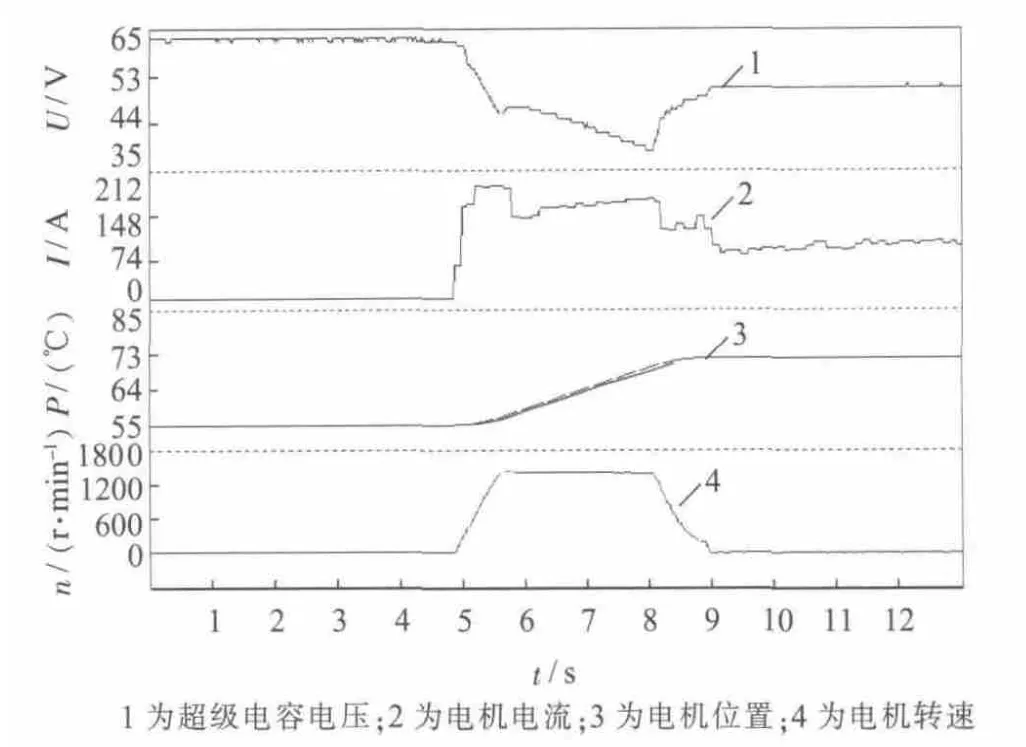
圖2 超級電容供電條件下第1次測試
超級電容給電機供電情況下,電壓從64 V跌落至53 V,最低39 V,只跌落了11 V,電機電流基本穩定,電機轉速開始啟動到截止,運行曲線平穩,屬于正常。
令布爾變量μ(pi,kα)表示協同成員pi與知識點kα間是否存在關聯關系。協同成員pi與知識點kα間存在關聯關系,即協同成員pi掌握知識點kα,則μ(pi,kα)=1;反之,則有μ(pi,kα)=0。因此,K-K子網絡與P-P子網絡之間的映射關系可以表示為
(2)將電容充滿電,在上位機軟件上將電機運動范圍設置為75~88°,力矩30 N·m,電機額定轉速為1500 r/min。由圖3所知,超級電容給電機供電情況下,電壓從74 V跌落至66 V,最低57 V,電容電壓降低8 V,電機電流基本穩定,有較小的跳變現象,電機轉速曲線平穩正常。
(3)將電容充滿電,在上位機軟件上將電機運動范圍設置為0~85°,力矩20 N·m,電機額定轉速為1500 r/min。由圖4所知,超級電容給電機供電情況下,電壓從75 V跌落至51 V,最低46 V,電容電壓在電機運行的整個85°范圍內只降落24 V,滿足變槳收槳時的電容電壓要求,電機電流平穩正常,電機轉速曲線也是平穩正常的。
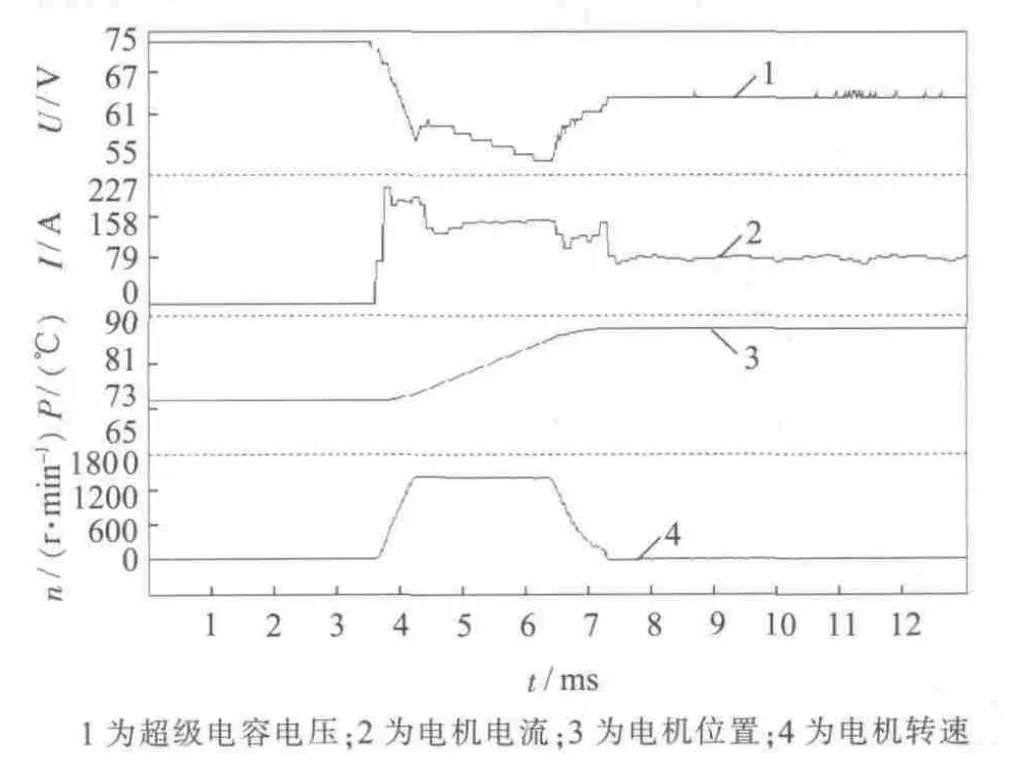
圖3 超級電容供電條件下第2次測試
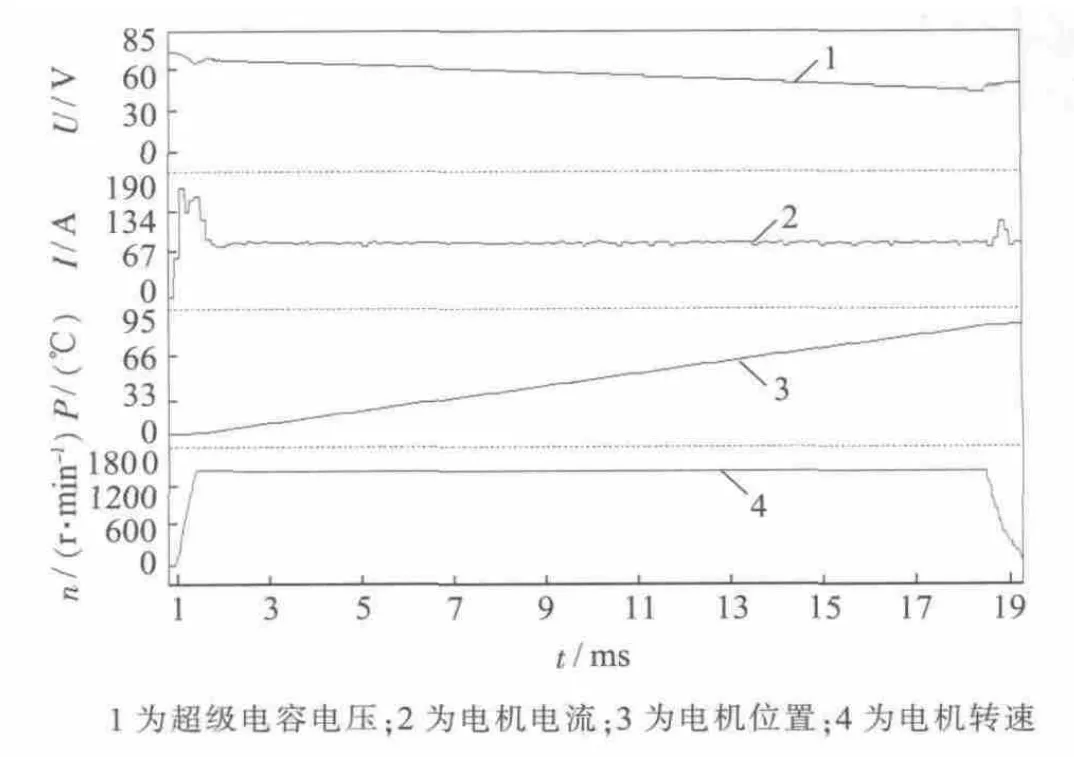
圖4 電容供電條件下第3次測試
(4)將電容充滿電,電機運動范圍0~85°,增大力矩到30 N·m,電機額定轉速為1500 r/min。由圖5所知,超級電容給電機供電情況下,電容電壓從75 V跌落至36 V,最低34 V,當增大力矩時,電容電壓掉落更快,跌落了39 V,這個更符合實際現場的風機情況,滿足變槳收槳時的電容電壓要求,電機電流和電機轉速曲線均平穩正常。
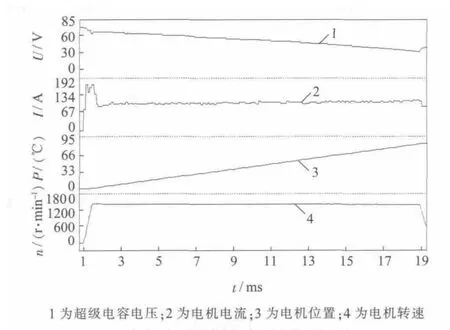
圖5 電容供電條件下第4次測試
3.2 測試分析
變槳系統超級電容容量選擇的依據是風機順槳過程中的力矩,電容儲存的能量應能滿足在主電源斷電或電壓跌落的情況下驅動槳葉回到安全位置。
根據NBT 31018-2011,電容組的容量應滿足槳葉在規定載荷情況下完成一次以上順槳動作要求[6]。依據2 MW風力發電機組變槳驅動系統規范要求得出整個順槳過程需要的力矩和為256.2176 N·m,對照實驗得出的曲線,可以將測試的超級電容與2 MW機組順槳需求能量做個對比,如表1所示。
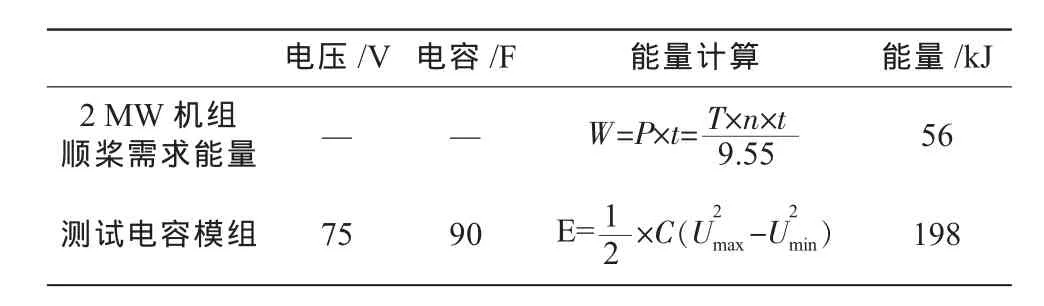
表1 測試用電容與2 MW機組順槳需求能量對比
所測試的電容測試過程中放電至35 V,根據電容能量公式可計算出電容釋放出的能量為198 kJ,遠大于2 MW機組順槳需求能量56 kJ,由此可見,該電容滿足2 MW風電機組變槳系統順槳需求。
4 結束語
[1]汪海波,田 煒,魯 斌,等.兆瓦級風機直流和交流電動變槳距技術[J].江蘇電機工程,2011,30(4):42-44,47.
[2]葉杭治.風力發電機組的控制技術[M].第2版.北京:機械工業出版社,2006,83-85.
[3]姚興佳,宋 俊.風力發電機組原理與應用[M].第2版.北京:機械工業出版社,2011:128-129.
[4]葉杭治.風力發電系統的設計、運行與維護[M].北京:電子工業出版社,2010:113-115.
[5]魯 斌,田 煒,劉 劍,等.基于超級電容的變槳系統后備電源設計[J].江蘇電機工程,2013,32(5):46-48.
[6]國家能源局.NB/T 31018—2011風力發電機組電動變槳控制系統技術規范[S].北京:中國電力出版社,2011.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32