基于SIMPACK的受電弓結構參數研究*
2014-04-05 02:35:26馬果壘高秀軍
鐵道機車車輛 2014年1期
馬果壘,高秀軍,宋 瑤
(北京賽德高科鐵道電氣科技有限責任公司,北京100176)
基于SIMPACK的受電弓結構參數研究*
馬果壘,高秀軍,宋 瑤
(北京賽德高科鐵道電氣科技有限責任公司,北京100176)
利用多體系統動力學技術,借助多體系統動力學軟件SIMPACK建立受電弓—接觸網耦合仿真試驗平臺。通過仿真試驗平臺對受電弓模態進行了分析,同時研究了受電弓參數對弓網動態特性的影響。系統研究受電弓—接觸網系統的目的在于優化其結構及懸掛參數,以改善弓網受流特性,設計最佳性能的受電弓。
受電弓;接觸網;SIMPACK;機車車輛振動
受電弓是電力牽引機車車輛的關鍵設備,主要由底架、升降系統、上框架、上導桿、下臂、下導桿和弓頭等組成,受電弓的功能是保證電流能夠從架空線傳送到機車車輛的電氣系統。
受電弓的組成結構見圖1。
隨著機車車輛運行速度的不斷提高,對受電弓性能要求越來越高。優化受電弓的動力學性能是弓網動力學研究中非常重要的研究內容。
通常,受電弓多采用三元或二元[1-3]等效質量模型進行弓網仿真研究。通過等效質量模型雖可以簡化模型參數,提高仿真效率,但當需要對受電弓組成部件進行詳細優化研究時,等效質量模型顯得過于簡化。
本文利用多體系統動力學軟件建立受電弓真實的桿件模型,可以對受電弓組成部件參數進行詳細研究。而且隨著速度的提高,受電弓上框架表現出彈性[4],見圖2。
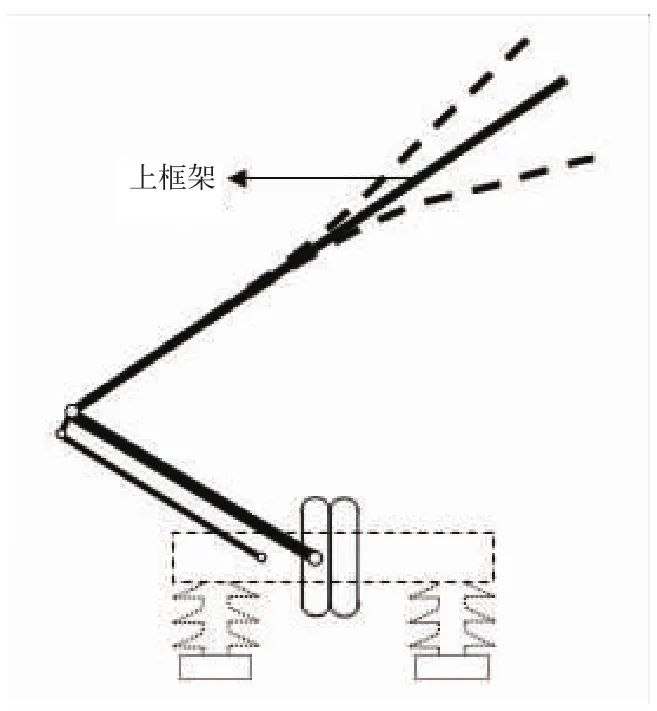
圖2 受電弓上框架彈性示意圖
建模時,對比研究受電弓上框架剛體和彈性模型。
1 模型建立
本文利用DSA380受電弓進行建模研究。DSA380高速受電弓由弓頭、框架、底架和傳動機構4部分組成,而框架又由上臂、下臂、下導桿和上導桿等桿件組成,各桿件通過鉸接連接在一起。底架支持框架,通過絕緣子固定在車頂上,框架通過升弓裝置支持弓頭,傳動機構作用于下臂桿來實現升弓動作。氣動升弓裝置安裝在底座上,通過鋼絲繩作用位于下臂桿下部的扇形板,從而實現升弓過程。滑板安裝在弓頭支架上,弓頭支架垂懸在4個拉簧下方。
通過機構運動分析可知,受電弓框架僅有一個自由度,即升弓角α,而弓頭作為一個懸掛的空間剛體,完整的自由度是6個。垂向耦合特性是受電弓與接觸網的主要耦合特性,即弓網之間的垂向接觸力。因此凡是影響這個力變化的因素都要考慮進去。因此,受電弓的弓頭僅考慮3個自由度:垂向運動、側滾運動和點頭運動。上框架考慮剛性和彈性兩種模型。
受電弓仿真模型見圖3。

圖3 受電弓SIPMPACK仿真模型
受電弓各個部件的材料分別為:
底架:不銹鋼;
下導桿:不銹鋼;
下臂:鋁合金;
上臂:鋁合金;
弓頭支架:鈦合金;
滑板托架:鋁合金。
2 受電弓模態分析
固有振動反映振動系統的固有特性,是研究一切振動問題的基礎。
當上框架考慮為剛體時,受電弓有4個獨立的自由度,1個是下臂桿的轉角,其他3個是弓頭的垂向運動、側滾運動和點頭運動。因此,受電弓有4個自振頻率,頻率較低的是下臂桿的自振頻率,頻率較高的是弓頭的自振頻率,由高到低依次是點頭運動、垂向運動和側滾運動,該頻率主要與弓頭彈簧的剛度有關。
當上框架考慮為彈性時,由于將上框架考慮為彈性體,其自由度將增多,模態分布也更豐富。兩種模型模態對比見表1。
從表1中,可以看出考慮上框架彈性模型模態成分要比上框架為剛體模型模態豐富得多。上框架的一階垂向彎曲模態出現在6~7 Hz之間,頻率較低。根據研究可知接觸網是一個低頻系統,當弓網耦合時很容易激發出上框架的這一彈性模態。
3 弓網動力學仿真分析
選取武廣線接觸網參數,建立弓網耦合模型[5-7],結果見圖4。

表1 不同模型受電弓模態對比

圖4 兩種模型不同速度接觸力比較
從圖4中,可以看出當速度較低時,兩種模型的接觸力變化不大;當速度增大后,上框架考慮為彈性模型接觸力明顯要優于上框架為剛體模型。
因此,在高速時,將上框架考慮為彈性更能體現受電弓的真實狀態。
4 受電弓參數影響
4.1 框架阻尼器
受電弓中,在下臂和底座間安裝有阻尼器。為了了解它的作用,對有(無)阻尼器兩種工況進行仿真。圖5為300 km/h速度下有(無)阻尼器接觸壓力的比較。從圖5中可知,不裝阻尼器隨著速度的提高在所謂接觸網硬點處會產生很大的沖擊,裝有阻尼器的受電弓對于接觸力的沖擊具有很好的吸收作用,可見框架阻尼對提高受流質量是十分有效的。

圖5 速度300 km/h有(無)阻尼器條件下接觸力比較
4.2 弓頭質量
圖6是300 km/h速度下弓頭質量為15 kg和8.722 kg時弓網接觸力的比較。
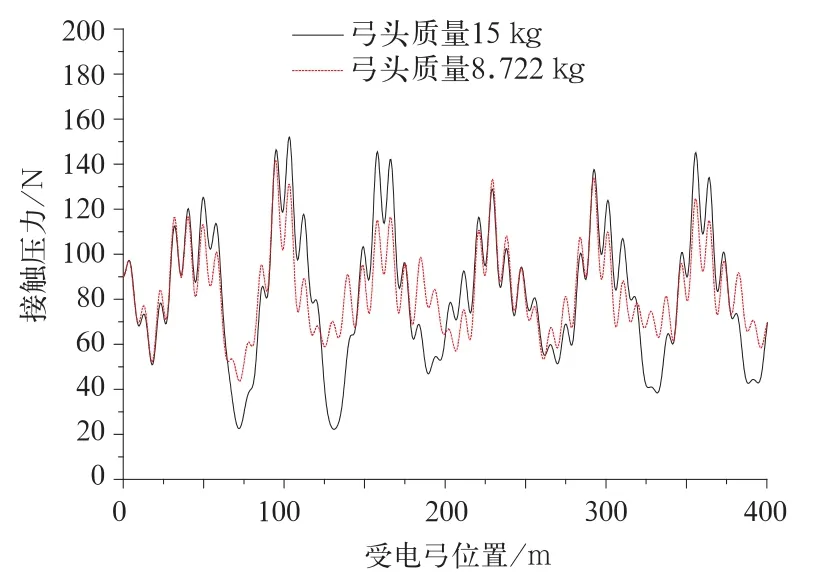
圖6 速度300 km/h不同弓頭質量的影響
弓頭質量的減小,可提高弓頭運動的加速度,也就是提高了弓頭的跟隨能力。可以看到,當弓頭質量減小時,接觸線硬點對接觸壓力的影響就減小。所以在可能的條件下應降低弓頭的質量。
4.3 弓頭懸掛阻尼
弓頭阻尼能有效地抑制受電弓振動,但阻尼只對共振頻率附近領域內有利,過大的阻尼反而阻礙弓頭的運動,影響其跟隨性。圖7為300 km/h速度不同弓頭阻尼下的接觸壓力計算結果比較。當沒有弓頭懸掛阻尼時,在受到不平順擾動后,接觸壓力會持續較大振幅的振動,對受流極為不利。因此,在接觸線平順性好的接觸網下運行的受電弓,其阻尼可小些,當接觸線平順性不好時,應加大弓頭懸掛阻尼。

圖7 速度300 km/h不同懸掛阻尼的影響
4.4 框架桿件質量影響
圖8是300 km/h速度下框架質量對弓網接觸力的影響比較。
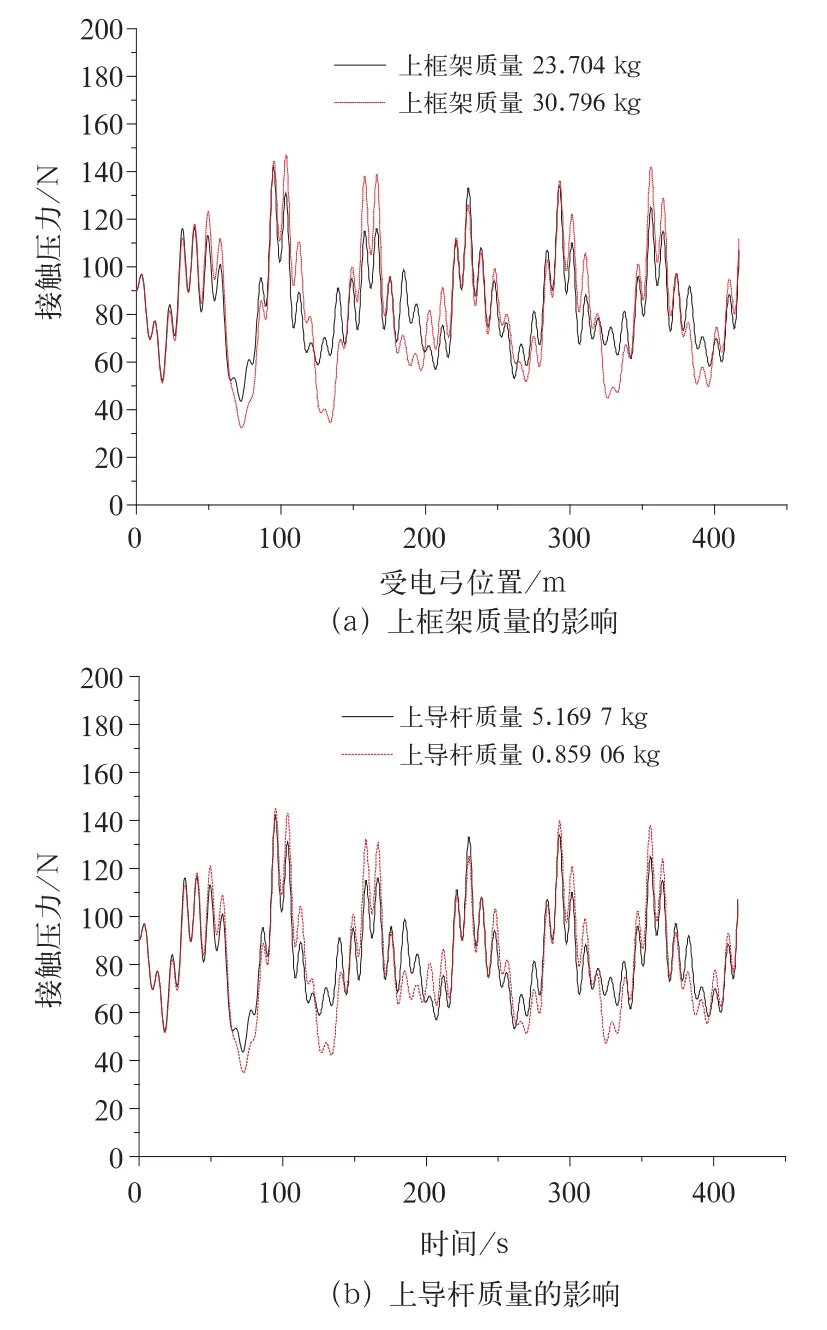
圖8 速度300 km/h框架桿件質量的影響
從圖8中可以看出當增大上框架和平衡桿的質量時會使受流質量變差。另外,對拉桿和下臂桿進行分析,可以得到同樣的結論。在滿足強度與剛度的前提下,最大限度減小受電弓框架各桿件的質量,以改善弓網動態性能是受電弓設計的關鍵問題。
5 結束語
本文利用多體動力學技術,借助多體系統動力學軟件SIMPACK,以DSA380受電弓為例,對受電弓結構特性進行了詳細研究,得出如下結論:
(1)高速時,應將上框架考慮為彈性體;
(2)受電弓結構參數對弓網動態特性具有重要影響:增大弓頭和框架質量會使弓網動態特性變差;阻尼器會改善弓網動態特性。
[1] 馬果壘.委內瑞拉鐵路DSA250弓網受流特性分析[J].鐵道機車車輛,2012,32(2):104-108.
[2] Weihua Zhang,Yi Liu,Guiming Mei.Evaluation of the coupled dynamical response of a pantograph-catenary system:contact force and stresses[J].Vehicle System Dynamics,2006,44(8):645-658.
[3] 張衛華.機車車輛車輛動態模擬[M].北京:中國鐵道出版社,2006.
[4] 馬果壘.受電弓系統研究[D].成都:西南交通大學,2009.
[5] 馬果壘,馬 君,等.基于多體系統動力學的受電弓參數優化[J].大連交通大學學報,2010,31(4):15-21.
[6] 張衛華,黃 標,梅桂明.基于虛擬樣機技術的高速弓網系統研究[J].鐵道學報,2005,27(4):30-35.
[7] 黃 標.基于虛擬樣機技術的受電弓/接觸網系統研究[D].成都:西南交通大學,2004.
[8] 翟婉明,蔡成標.機車—軌道耦合振動對受電弓—接觸網系統動力學的影響[J].鐵道學報,1998,20(1):32-38.
Research on Structure Parameters of Pantograph Based on SIMPACK
MA Guolei,GAO Xiujun,SONG Yao
(CNR beijing CED Railway Electric Tech.Co.,Ltd.,Beijing 100176,China)
By using the multibody system dynamics technology and SIMPACK software,the simulation platform of the pantographcatenary coupling system was established in the design procedure of high-speed pantograph.Modal analysis of pantograph was researched,and the response of contact force and vibration of the pantograph-catenary system under different running speed was calculated.Research on pantograph-catenary system was to reach optimum design purpose of pantograph structure and suspension parameters,thus improve the current collecting quality,so it has a guidance meaning for the design of pantograph.Application of virtual prototyping in research on pantograph-catenary system accelerates the design speed,and reduces the design cost and shortens developing time of product.
pantograph;catenary;SIMPACK;locomotive vibration
U225.4
A
10.3969/j.issn.1008-7842.2014.01.28
1008-7842(2014)01-0126-03
*國家科技支撐計劃資助項目(2009BAG12A05)。
4—)男,工程師(
2013-08-18)
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
中學生數理化·中考版(2020年10期)2020-11-27 01:59:48
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中國生殖健康(2019年2期)2019-08-23 08:12:08
光學精密工程(2016年6期)2016-11-07 09:07:19
汽車觀察(2016年3期)2016-02-28 13:16:26
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
