基于優(yōu)化PID的食品加工恒溫控制研究
2015-05-28 10:46:00李勇
電氣技術(shù) 2015年12期
關(guān)鍵詞:利用
李 勇
(重慶港渝商業(yè)管理公司,重慶 400010)
隨著人們對健康意識的不斷提高,國家對食品質(zhì)量的要求也越來越嚴(yán)格。在食品加工行業(yè),利用恒溫控制技術(shù)能夠使食品質(zhì)量在加工的環(huán)節(jié)中得到最大限度的保持,降低了食品腐敗率[1]。在進(jìn)行食品加工的環(huán)節(jié)中,由于溫度的控制系統(tǒng)是一個(gè)存在滯后性和時(shí)變性的系統(tǒng),因此,如何在食品加工過程中進(jìn)行恒溫控制,已經(jīng)成為當(dāng)前工控領(lǐng)域的一個(gè)熱點(diǎn)研究課題。傳統(tǒng)的食品加工過程中恒溫控制方法是通過常規(guī)的PID 控制方法實(shí)現(xiàn)的。PID 控制器具有簡單可靠、易于實(shí)現(xiàn)、適應(yīng)性強(qiáng)等特點(diǎn),是食品加工行業(yè)中使用最普遍的一種恒溫控制方法。但是這種方法應(yīng)用于存在滯后性和時(shí)變性的食品加工恒溫控制系統(tǒng)時(shí)無法實(shí)現(xiàn)理想的控制效果。
因此,針對常規(guī)的PID 控制算法在食品加工過程中存在的缺陷,有必要進(jìn)行優(yōu)化。現(xiàn)階段已經(jīng)有很多專家針對這種缺陷提出了獨(dú)特的見解。當(dāng)前主要的食品加工過程中的恒溫控制方法主要有基于積分分離的PID 控制方法、基于參數(shù)自整定的PID 控制方法和基于不完全微分的PID 控制方法。其中,基于積分分離的PID 控制方法是在食品加工行業(yè)應(yīng)用最廣泛的一種恒溫控制方法。由于食品加工過程中的恒溫控制方法在保障食品質(zhì)量方面具有無可替代的作用,因此擁有廣闊的發(fā)展前景,并被很多學(xué)者作為重點(diǎn)課題進(jìn)行研究。
1 恒溫控制軟件設(shè)計(jì)原理
傳統(tǒng)的食品加工過程中恒溫控制的有關(guān)原理如下所述。
在進(jìn)行食品加工過程中恒溫控制的過程中,通過控制偏差對溫度進(jìn)行調(diào)節(jié),從而使食品加工過程中的溫度維持在一定的范圍內(nèi)。PID 控制的核心是,將當(dāng)前溫度與目標(biāo)溫度相比較得到溫度偏差,并將溫度偏差轉(zhuǎn)化為電壓信號的形式,利用電壓信號對供熱系統(tǒng)進(jìn)行調(diào)節(jié),從而實(shí)現(xiàn)了食品加工過程中的溫度控制。恒溫控制的關(guān)鍵是利用控制過程中的溫度偏差產(chǎn)生電壓信號,將電壓信號進(jìn)行比例、微分、積分化,產(chǎn)生控制信號。圖1所示描述了食品加工過程中的恒溫控制器的結(jié)構(gòu)。
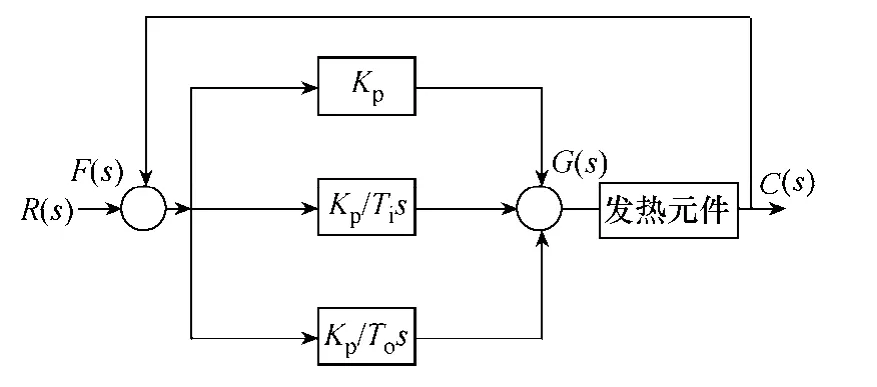
圖1 傳統(tǒng)的恒溫控制結(jié)構(gòu)
在食品加工過程中恒溫控制的過程中,將溫度偏差轉(zhuǎn)化為PID 的比例、微分和積分化的電壓信號組合[1],將供熱系統(tǒng)的實(shí)際值作為PID 控制器的輸入值,食品加工過程中的溫度調(diào)節(jié)過程能夠用下述公式進(jìn)行描述:

式中,U(t)為供熱系統(tǒng)的實(shí)際值;e(t)為調(diào)節(jié)溫度的信號;Kp、TI和Td分別為比例系數(shù)、微分時(shí)間參數(shù)和積分時(shí)間參數(shù)[2]。
將公式(1)進(jìn)行離散化處理,能夠轉(zhuǎn)換為差分方程的形式:

在進(jìn)行食品加工過程中恒溫控制的過程中,需要確定合理的調(diào)節(jié)參數(shù),并及時(shí)對控制參數(shù)進(jìn)行調(diào)整,從而實(shí)現(xiàn)滿意的溫度控制效果。調(diào)節(jié)參數(shù)的確定過程如下所述:
1)設(shè)置積分系數(shù)Ki=0 和微分系數(shù)Kd=0,此時(shí)恒溫控制系統(tǒng)工作在閉環(huán)狀態(tài)下,利用比例系數(shù)Kp調(diào)節(jié)溫度信號,并對溫度控制效果進(jìn)行監(jiān)測,直至達(dá)到理想的控制效果。
2)不斷對比例系數(shù)Kp進(jìn)行調(diào)整,并增大積分系數(shù)Ki的值,直至滿足實(shí)際控制要求。
3)在積分系數(shù)Ki的值一定的情況下,按照從小到大的方式調(diào)節(jié)比例系數(shù)Kp的值,并對溫度控制效果進(jìn)行監(jiān)測,直至達(dá)到理想的控制效果。否則,對比例系數(shù)Kp和積分系數(shù)Ki的值進(jìn)行不斷的調(diào)整,直至得到合理的Kp值和Ki值。
4)在控制參數(shù)的調(diào)整過程中引入合理的微分時(shí)間參數(shù)TI和積分時(shí)間參數(shù)TD,并不斷調(diào)整比例系數(shù)Kp和積分系數(shù)Ki的值,直至滿足實(shí)際控制要求。
根據(jù)上述方法,在食品加工過程恒溫控制的過程中不斷調(diào)節(jié)控制參數(shù),并不斷實(shí)驗(yàn)。當(dāng)Ki=0.03,Kd=12 時(shí),能夠得到理想的溫度控制效果,此時(shí),控制過程需要的時(shí)間為33s,超調(diào)量為0.96%。圖2所示描述了食品加工過程中的溫度調(diào)節(jié)效果。
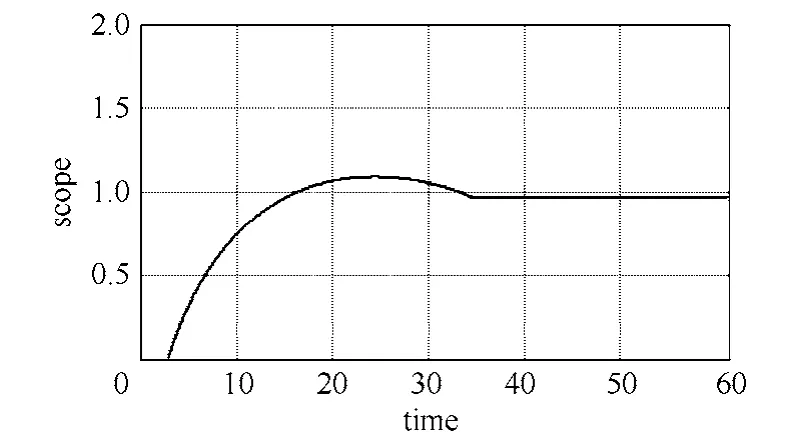
圖2 傳統(tǒng)算法恒溫控制效果
2 基于優(yōu)化PID 的恒溫控制方法
2.1 控制參數(shù)的確定過程
在進(jìn)行食品加工過程中恒溫控制過程中,需要通過BP 神經(jīng)網(wǎng)絡(luò)獲得溫度控制過程中的相關(guān)參數(shù)。設(shè)置溫度控制誤差為f(l),利用下述公式能夠?qū)斎氲臏囟日{(diào)節(jié)信號進(jìn)行歸一化處理:

利用下述公式能夠計(jì)算食品加工過程中環(huán)境的溫度變化率:
設(shè)置食品加工過程中恒溫控制的誤差為F,PID 的控制參數(shù)為LQ、LM和LE,由于這些參數(shù)的數(shù)值都大于0,因此,BP 神經(jīng)網(wǎng)絡(luò)的輸出也大于0。圖3所示描述的是本文用于PID 參數(shù)優(yōu)化的神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)。
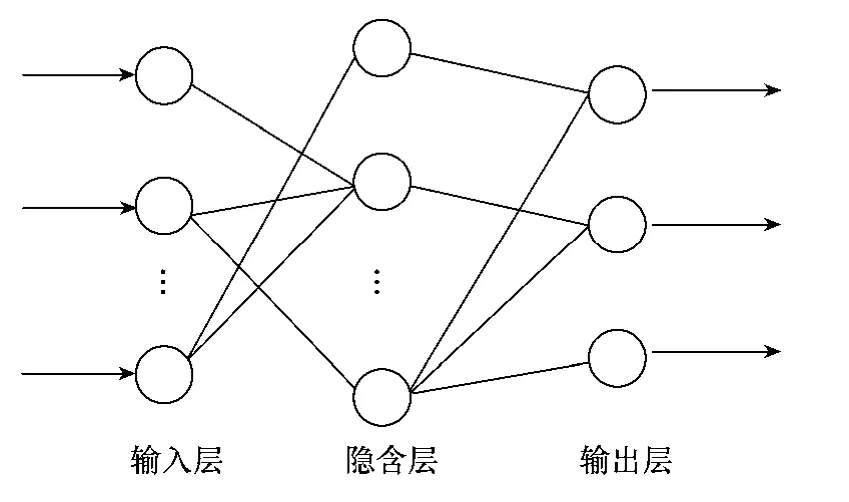
圖3 BP 神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)
利用下述公式能夠描述溫度調(diào)節(jié)信號的輸入量:

式中,N為溫度調(diào)節(jié)信號的數(shù)目,是根據(jù)食品加工過程中的溫度變化情況獲得的。
BP 神經(jīng)網(wǎng)絡(luò)隱含層的輸出量能夠用下述公式進(jìn)行計(jì)算:
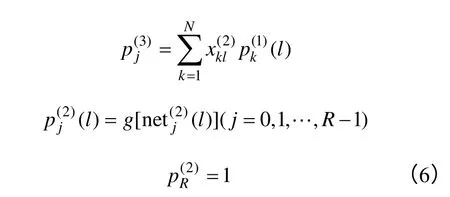
BP 神經(jīng)網(wǎng)絡(luò)的輸出量能夠用下述公式進(jìn)行計(jì)算:

根據(jù)上述方法,能夠利用BP 神經(jīng)網(wǎng)絡(luò)能夠獲得PID 的控制參數(shù),并作為食品加工過程中的恒溫控制初始參數(shù)。
2.2 食品加工過程中恒溫控制的實(shí)現(xiàn)
經(jīng)過BP 神經(jīng)網(wǎng)絡(luò)優(yōu)化后的參數(shù)作為PID 控制器的初始參數(shù),對食品加工過程中的溫度進(jìn)行調(diào)節(jié),具體方法如下所述:
利用下述公式能夠描述食品加工過程中的溫度變化情況:

在BP 神經(jīng)網(wǎng)絡(luò)中引入梯度下降法[3],對各層的連接權(quán)重進(jìn)行更新,其公式如下所述:

式中,κ為食品恒溫控制過程中的參數(shù)更新速度,β是其系數(shù)。
利用下述公式能夠計(jì)算恒溫控制過程中溫度誤差:
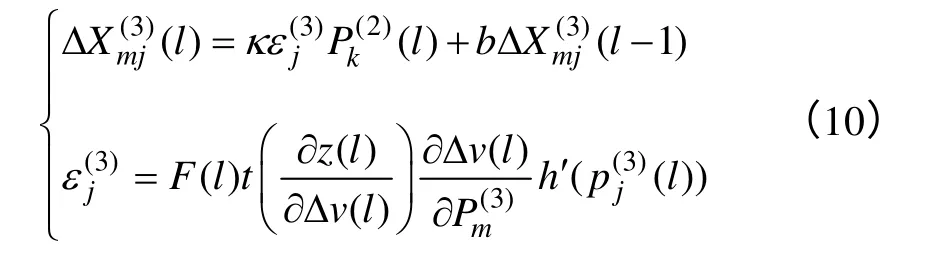
利用下述公式能夠獲得反饋至控制端的恒溫控制參數(shù):
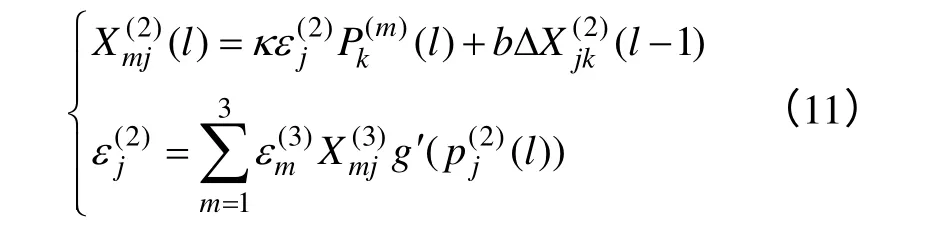
通過式(11)能夠獲得準(zhǔn)確的恒溫控制參數(shù),從而實(shí)現(xiàn)對溫度的實(shí)時(shí)調(diào)節(jié)。
食品加工過程中的恒溫控制具體過程如下所述:
1)構(gòu)建BP 神經(jīng)網(wǎng)絡(luò)模型,確定模型的結(jié)構(gòu)、響應(yīng)的連接權(quán)重和閥值[4];PID 的控制參數(shù)通過構(gòu)建的BP 神經(jīng)網(wǎng)絡(luò)進(jìn)行優(yōu)化。
2)計(jì)算模型的輸入量與輸出量的之間的差值,其公式如下所述:

3)計(jì)算PID 控制器的參數(shù)和反饋調(diào)節(jié)參數(shù),利用反饋參數(shù)對溫度控制參數(shù)調(diào)整;
4)設(shè)置l=l+ 1,并跳轉(zhuǎn)到過程2)。
根據(jù)上面闡述的方法,PID 控制參數(shù)通過BP神經(jīng)網(wǎng)絡(luò)模型進(jìn)行優(yōu)化,并作為PID 的初始參數(shù),計(jì)算反饋參數(shù),將當(dāng)前食品加工過程中的溫度變化情況反饋到PID 輸入端進(jìn)行溫度調(diào)節(jié),從而實(shí)現(xiàn)了食品加工過程中的恒溫控制。
3 實(shí)驗(yàn)結(jié)果及分析
3.1 實(shí)驗(yàn)參數(shù)設(shè)置
為了驗(yàn)證本文算法在食品加工過程中恒溫控制方面的有效性,需要進(jìn)行一次仿真實(shí)驗(yàn)。利用傳統(tǒng)的PID 控制方法與本文優(yōu)化的PID 控制方法進(jìn)行對比。本文的食品加工過程中的恒溫控制系統(tǒng)能夠用圖4進(jìn)行描述。
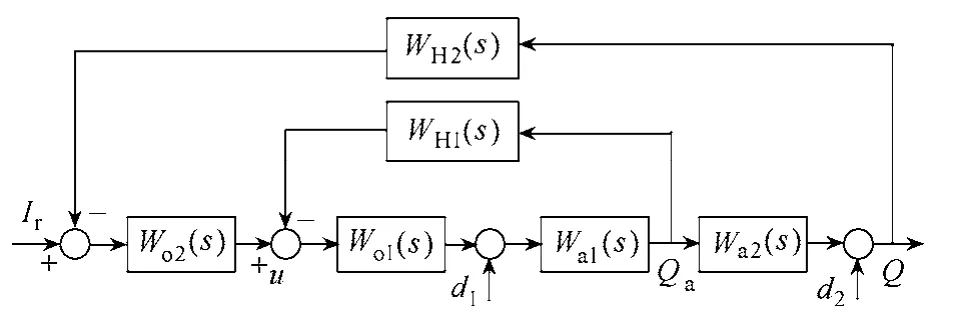
圖4 本文的恒溫控制系統(tǒng)
在上圖4中,Ir為溫度預(yù)警值,Qa為當(dāng)前溫度,Q為超溫值,Wa1(s)為PID 的主調(diào)節(jié)器,Wa2(s)為PID 的從調(diào)節(jié)器,Wo1(s)為調(diào)節(jié)階段的控制函數(shù),Wo2(s)為非調(diào)節(jié)階段的控制函數(shù),WH1(s)為調(diào)節(jié)階段的檢測值,WH2(s)為非調(diào)節(jié)階段的檢測值,d1為調(diào)節(jié)階段的擾動(dòng)值,d2為非調(diào)節(jié)階段的擾動(dòng)值。
設(shè)置主、從調(diào)節(jié)器中的參數(shù)為
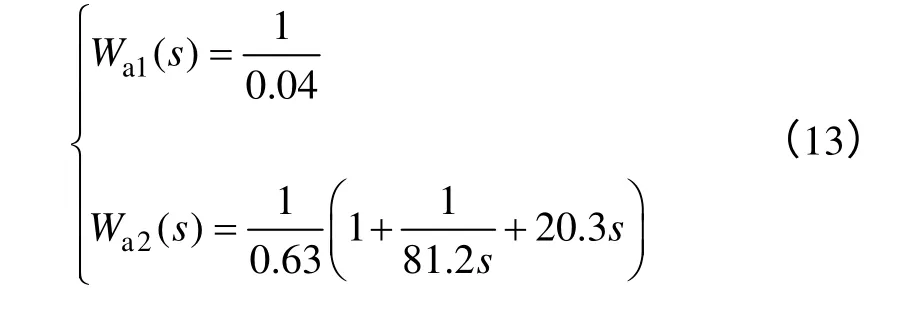
其他參數(shù)設(shè)置為:η1= 0.3,K1= 1.12,η2= 0.6,K2= 1.4。
3.2 不同算法結(jié)果比較與分析
在進(jìn)行食品加工過程中恒溫控制的過程中,利用傳統(tǒng)算法和本文算法進(jìn)行實(shí)驗(yàn),獲得的結(jié)果能夠用圖5進(jìn)行描述。
從上圖5能夠可以看出,本文算法在食品加工過程中環(huán)境溫度變化程度較大的情況下仍能保持良好的輸出效果,而傳統(tǒng)算法在工況出現(xiàn)變化時(shí),超調(diào)量更大,控制效果降低,這表明本文算法具有調(diào)節(jié)時(shí)間快、抗干擾性能強(qiáng)等特點(diǎn)。
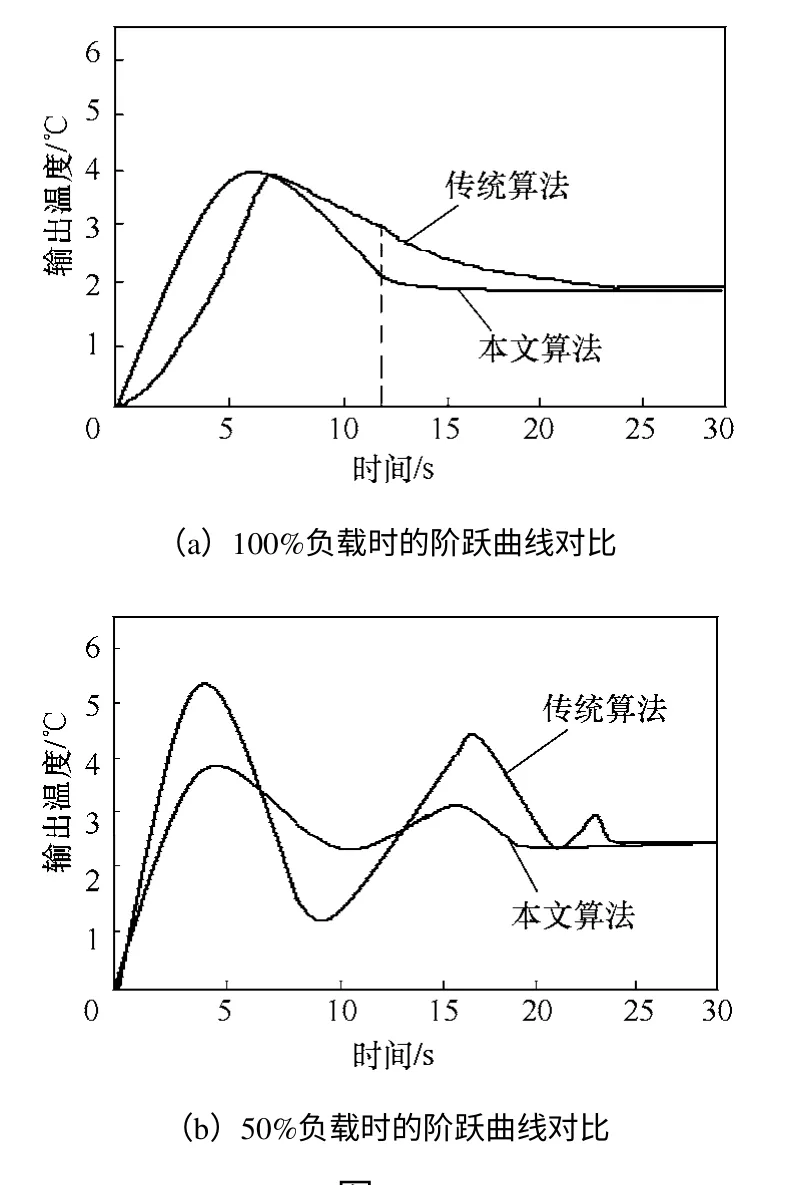
圖5
為了進(jìn)一步驗(yàn)證本文算法的優(yōu)越性,利用不同算法對食品加工廠中恒溫控制系統(tǒng)多次實(shí)踐,并通過在計(jì)算機(jī)上編程獲得傳統(tǒng)算法和本文算法的恒溫控制曲線,如圖6所示。
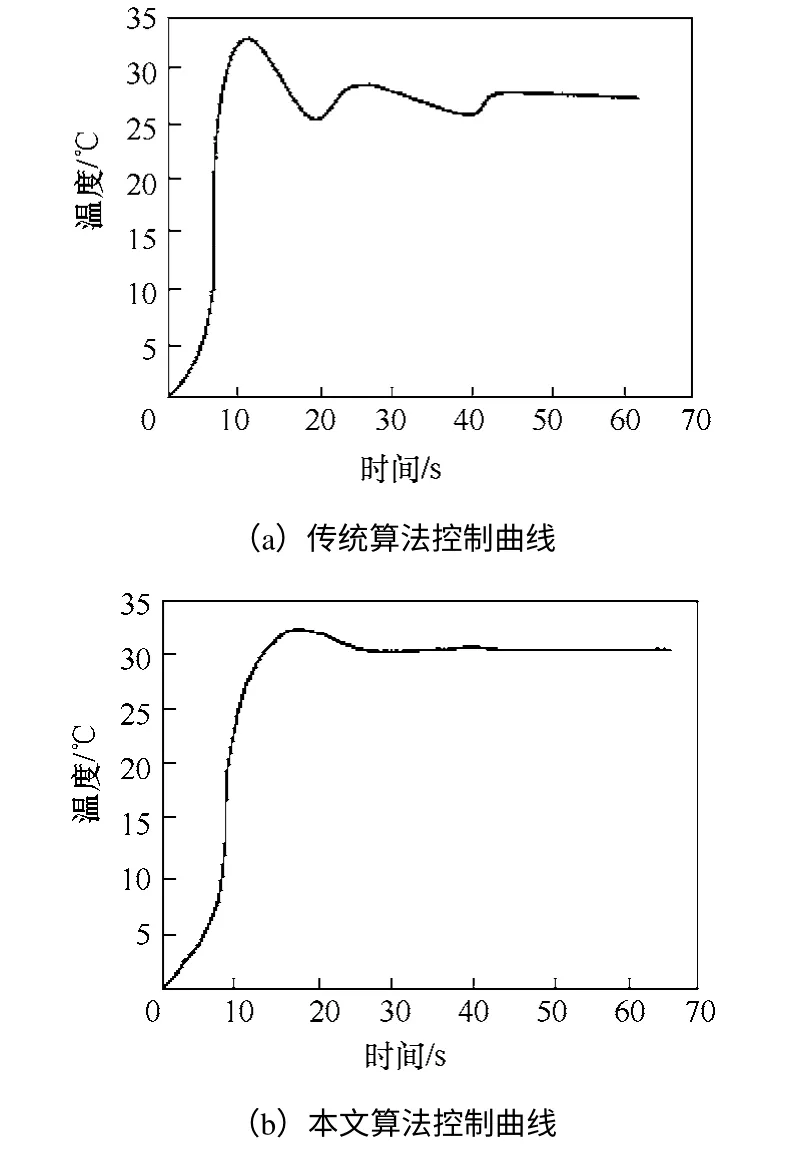
圖6 控制曲線
從圖6中的實(shí)驗(yàn)結(jié)果可以看出,本文算法的恒溫控制系統(tǒng)對于食品加工過程中的溫度變化調(diào)節(jié)的平穩(wěn)性相對傳統(tǒng)算法有了明顯的提高,主要表現(xiàn)在食品加工過程中的溫度上升和溫度下降時(shí)的調(diào)節(jié)過程更加平滑和穩(wěn)定,避免了傳統(tǒng)算法進(jìn)行恒溫控制時(shí)的溫度跳躍式升高或者下降的現(xiàn)象。這是由于本文算法利用神經(jīng)網(wǎng)絡(luò)對PID 的控制參數(shù)進(jìn)行了優(yōu)化,并作為PID 的初始參數(shù),通過計(jì)算反饋參數(shù),將當(dāng)前食品加工過程中的溫度變化情況反饋到PID輸入端進(jìn)行溫度調(diào)節(jié),從而實(shí)現(xiàn)了食品加工過程中的恒溫控制的理想效果。將上述實(shí)驗(yàn)中的數(shù)據(jù)進(jìn)行整理和分析,能夠得到表1中的數(shù)據(jù)。
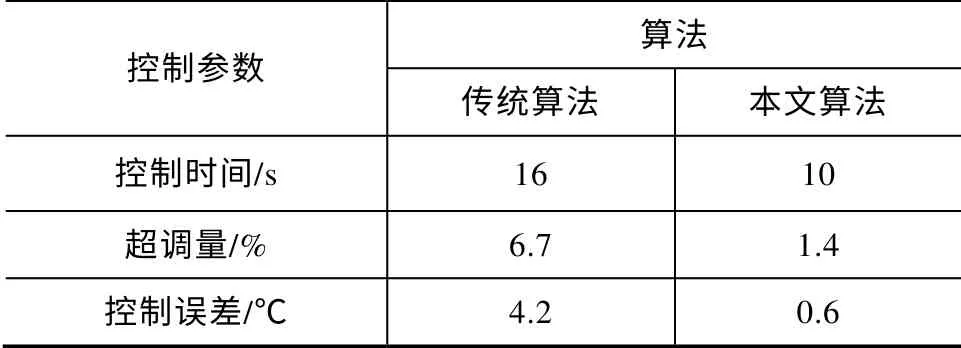
表1 不同算法恒溫控制效果比較
從表1中實(shí)驗(yàn)數(shù)據(jù)能夠得知,利用本文算法進(jìn)行食品加工過程中的恒溫控制,能夠取得理想的溫度調(diào)節(jié)效果,相對傳統(tǒng)算法有著較強(qiáng)的優(yōu)勢。
4 結(jié)論
本文提出一種基于優(yōu)化PID 的恒溫控制方法。構(gòu)建BP 神經(jīng)網(wǎng)絡(luò)模型,利用該模型對PID 的控制參數(shù)進(jìn)行優(yōu)化,獲得最優(yōu)初始的PID 控制參數(shù),在恒溫控制的過程中,計(jì)算反饋調(diào)節(jié)參數(shù),將當(dāng)前食品加工過程中的溫度變化情況反饋到PID 輸入端進(jìn)行溫度調(diào)節(jié),從而實(shí)現(xiàn)了食品加工過程中的恒溫控制。仿真實(shí)驗(yàn)結(jié)果表明,利用本文算法進(jìn)行食品加工過程中的恒溫控制,降低控制過程中的超調(diào)量,縮短控制時(shí)間,取得了令人滿意的效果。
[1] 李草蒼,張翠芳.基于最小資源分配網(wǎng)絡(luò)的自適應(yīng)PID 控制[J].計(jì)算機(jī)應(yīng)用研究,2015,32(1): 167-169,178.
[2] 孫大鷹,徐申,孫偉鋒,等.Buck 型DC-DC 變換器中數(shù)字預(yù)測模糊PID 控制器的設(shè)計(jì)與實(shí)現(xiàn)[J].東南大學(xué)學(xué)報(bào)(自然科學(xué)版),2014,44(5): 897-901.
[3] 鄧小東,趙宇宏.針對可變?nèi)嵝载?fù)載的參數(shù)自整定模糊PID 控制算法的仿真研究[J].機(jī)械制造,2014,52(10): 9-11.
[4] 趙秋宇,胡萬強(qiáng).CMAC-PID 控制器在提升裝置速度控制中的應(yīng)用研究[J].許昌學(xué)院學(xué)報(bào),2014,33(5): 50-52.
猜你喜歡
中等數(shù)學(xué)(2022年2期)2022-06-05 07:10:50
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年11期)2021-12-06 05:38:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年6期)2021-07-28 06:19:08
小學(xué)生學(xué)習(xí)指導(dǎo)(低年級)(2020年6期)2020-07-25 02:31:36
小學(xué)生學(xué)習(xí)指導(dǎo)(低年級)(2019年11期)2019-11-25 07:31:44
小學(xué)生學(xué)習(xí)指導(dǎo)(低年級)(2018年9期)2018-09-26 05:59:44
瘋狂英語·新讀寫(2018年2期)2018-09-07 09:32:10
數(shù)學(xué)小靈通·3-4年級(2017年6期)2017-06-22 11:28:50
工業(yè)設(shè)計(jì)(2016年5期)2016-05-04 04:00:33
河北遙感(2015年4期)2015-07-18 11:05:06