某型飛機自動駕駛信號仿真系統設計與實現
2014-04-03 06:52:04饒明波鞏立艷楊杰紅謝慧慈
教練機 2014年1期
饒明波,鞏立艷,楊杰紅,謝慧慈
(中航工業洪都,江西 南昌 330024)
0 引言
某型飛機進行飛控系統機上地面自動駕駛功能邏輯測試試驗時,需要為飛控計算機提供動態的飛機攻角、高度、馬赫數等大氣機數據以及飛機姿態角、升降速度等慣導數據信息。然而飛機在地面靜止狀態,真實飛機上的大氣數據計算機以及慣導系統無法提供試驗所需的動態數據。因此,需要設計一套地面自動駕駛信號仿真系統。
為實現與機上飛控計算機的數據交聯,自動駕駛信號仿真系統采用基于1553B(GJB289A)總線標準開發[1]。同時系統增加了實時網功能,用于接收飛機運動仿真數據。
1 系統概述
自動駕駛信號仿真系統用于模擬慣導、大氣數據計算機發送到飛控計算機的GJB289A總線信號。該系統可以人工設置慣導和大氣數據計算機的仿真數據,然后通過GJB289A總線發送到飛控計算機,實現開環仿真試驗,用于飛控系統機上自動駕駛功能邏輯測試試驗;該仿真系統同時具備通過VMIC實時網絡實時接收飛機運動仿真系統發送的飛機姿態等數據[2],并通過GJB289A總線發送到飛控計算機,構成閉環仿真試驗環境,用于飛控系統鐵鳥仿真試驗[3]。自動駕駛信號仿真系統開/閉環試驗連接示意如圖1所示。
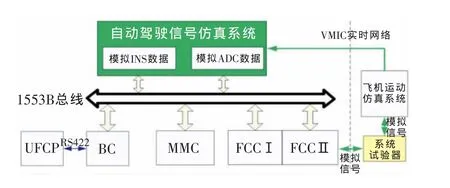
圖1 自動駕駛信號仿真系統開/閉環連接示意圖
2 仿真系統設計
2.1 系統功能設計
自動駕駛信號仿真系統應實現以下主要功能:
1)模擬慣導、大氣數據計算機兩個終端RT,并通過GJB 289A總線與飛控計算機進行通訊;
2)按照慣導與飛控計算機的GJB 289A總線接口協議模擬慣導發出的信息;
3)按照大氣數據計算機與飛控計算機的GJB 289A總線接口協議模擬大氣數據計算機發出的信息;
4)通過VMIC實時網絡接收飛機運動仿真系統發出的飛機姿態、高度、速度等數據,并通過GJB 289A總線發送到飛控計算機、UFCP,供飛控系統閉環仿真使用;
5)在進行開環仿真試驗時,能夠動態設置慣導和大氣數據計算機發出的信息并進行數據有效性的設置等。
自動駕駛信號仿真系統按照慣導、大氣數據計算機與飛控計算機的GJB289A通信接口協議進行設計,接口協議如下。
1)慣導、大氣數據計算機與飛控計算機Ⅰ、Ⅱ的RT地址如下所示:
(1)飛控計算機Ⅰ、Ⅱ的RT地址:12、13;
(2)慣導(INS)的RT地址:4;
(3)大氣數據計算機(ADC)的RT地址:10。
2)慣導、大氣數據計算機與飛控計算機GJB289A總線通信關系如下所示:
(1)INS:RT=4,SUB=4,TO FC1,RT=12,SUB=1
(2)INS:RT=4,SUB=5,TO FC2,RT=13,SUB=1
(3)ADC:RT=10,SUB=4,TO FC1,RT=12,SUB=2
(4)ADC:RT=10,SUB=5,TO FC2,RT=13,SUB=2
注:其中(4)表示:RT地址為10,子地址5,向RT地址為13,子地址2發送數據。
2.2 系統硬件設計
為實現仿真1553B總線數據以及接收實時網傳輸的數據信號,自動駕駛信號仿真系統的硬件組成包括:工控機、1553B數據通信板卡、實時網卡、總線傳輸線及接插件,所需的硬件設備如表1所示。

表1 自動駕駛信號仿真系統硬件組成
2.3 系統軟件設計
自動駕駛信號仿真軟件的開發環境為:
操作系統:Windows XP
軟件環境:Visual C++6.0
自動駕駛信號仿真軟件功能包括實現1553B板卡的初始化、實時網板卡的初始化、仿真界面設計、仿真信號有效性設置、仿真信號輸入、實時網數據接收及信號轉換處理、1553B仿真信號發送等功能。軟件設計流程如圖2所示。
根據自動駕駛信號模擬系統功能要求,自動駕駛信號仿真軟件分為三大模塊,即主界面、接口模塊、數據仿真模塊。

圖2 仿真軟件功能流程
1)接口模塊
板卡初始化:實現GJB289A板卡、VMIC實時網卡的初始化;
數據準備:設置或通過實時網獲取仿真數據并按接口文件規定轉化為GJB 289A總線數據格式;
數據通信:按照GJB 289A總線數據協議通訊;按照實時網通信協議通訊。
通信周期:按規定的通信周期50ms進行數據收發。
2)系統主界面
自動駕駛信號仿真軟件主界面是用戶進行仿真操作的人工交互界面,主要內容包括:
板卡初始信息檢查;
開/閉環仿真控制;
慣導/大氣機數據有效性的設置;
慣導/大氣機開環仿真數據輸入;
仿真啟動、暫停/停止和退出系統功能。
3)數據仿真模塊
慣導數據仿真:模擬慣導向飛控計算機發送數據;
大氣數據計算機數據仿真:模擬大氣數據計算機向飛控計算機發送數據。
自動駕駛信號仿真軟件作為模擬大氣數據計算機和慣導兩個RT,主要是在響應BC命令的基礎,用來接收BC命令和數據以及上報狀態。RT仿真軟件算法根據GJB 289—1987《飛機內部時分制指令/響應式多路傳輸數據總線》中的消息格式要求進行[4],RT軟件開發的流程如圖3所示。

圖3 RT軟件開發流程
3 仿真系統實現
進行自動駕駛功能邏輯試驗時,自動駕駛信號仿真系統與其他系統進行試驗的組成環境及連接示意如圖4所示。其中,進行機上或開環試驗的接線方式不包括虛線框部分;進行鐵鳥環境下的閉環試驗接線方式包括虛線框里的內容。
自動駕駛信號仿真軟件包括開環仿真和閉環仿真兩部分功能,自動駕駛信號仿真軟件運行的界面如圖5所示。
4 結論
本文結合機上自動駕駛功能試驗的需求,介紹了基于1553B總線及實時網技術的自動駕駛信號仿真系統的軟硬件設計方法。該仿真系統經機上及鐵鳥環境的自動駕駛功能邏輯試驗驗證,系統功能穩定,滿足試驗要求。
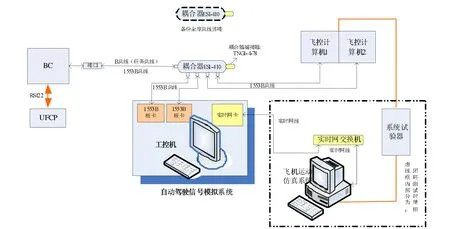
圖4 自動駕駛功能試驗仿真環境組成圖

圖5 自動駕駛信號仿真軟件試驗界面
[1]徐慧,楊凱,匡本剛,段守福.基于1553B總線的半實物仿真系統[J].火力與指揮控制,2011.
[2]楊冰,王鵬,基于反射內存的實時網設計[J].科技情報開發與經濟,2011.
[3]李筱雅,尚麗娜,張芹芹.1553總線測試仿真系統設計與實現[J].現代電子技術,2012.
[4]李庭剛,謝廷毅,肖衛國,基于微機實時網半實物仿真系統數據通訊研究[J].計算機仿真,2011.
猜你喜歡
軍事文摘(2023年10期)2023-06-09 09:15:06
小學科學(學生版)(2021年7期)2021-07-28 06:44:42
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
科技傳播(2019年22期)2020-01-14 03:06:34
電子制作(2018年11期)2018-08-04 03:25:42
消費導刊(2017年20期)2018-01-03 06:26:40
河北書畫研究(2016年2期)2016-08-24 02:14:50
新農業(2016年18期)2016-08-16 03:28:27
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
