基于ADAMS 的新產(chǎn)品開發(fā)設計
2014-04-01 06:20:34蔣新雅王金龍
機械制造與自動化 2014年5期
蔣新雅,王金龍
(四川大學,四川 成都 610064)
0 引言
在傳統(tǒng)的設計和制造過程中,研發(fā)新產(chǎn)品通常要經(jīng)過設計、樣機試制、工業(yè)性試驗、改進定性和批量生產(chǎn)幾個步驟,只有通過周而復始的設計——試驗——設計過程產(chǎn)品才能達到要求的性能[1]。這種物理樣機的設計研發(fā)模式存在嚴重的缺陷,即成本高、周期長,往往使得物理樣機的反復性試驗不夠充分。基于物理樣機上的設計試驗過程嚴重制約了產(chǎn)品的品質(zhì)提高、成本的降低和對市場的占有。虛擬樣機技術可使產(chǎn)品設計人員在各種虛擬環(huán)境中真實的模擬產(chǎn)品整機的運動及受力情況,快速分析多種設計方案,進行對物理樣機而言難以進行或根本無法進行的試驗,直到獲得優(yōu)化設計方案[2]。
本文主要通過一個實例具體來說明運用多體動力學軟件ADAMS 開發(fā)一個新產(chǎn)品的設計過程,可為產(chǎn)品開發(fā)提供一條種新的途徑,同時這也是以后產(chǎn)品開發(fā)的主流趨勢。
1 ADAMS 虛擬樣機技術
所謂虛擬樣機技術就是在建造第一臺物理樣機之前,利用計算機技術建立產(chǎn)品的計算機模型,通過基于實體可視化的仿真分析,模擬該產(chǎn)品在真實工作環(huán)境條件下的運動和動力特性,并反復修改設計,而得到最優(yōu)設計方案[3]。ADAMS 是世界范圍內(nèi)第一個具有仿真整個機械系統(tǒng)工作性能的大型仿真分析系統(tǒng)[4]。
本文選用的是一個經(jīng)典機構—彈簧掛鎖。該機構掛鎖共有十二個,在Apollo 登月計劃中,被用來夾緊登月倉和指揮服務倉。其物理樣機模型和虛擬樣機模型如圖1所示。Hook:掛鉤;Coupling member:連接成員。
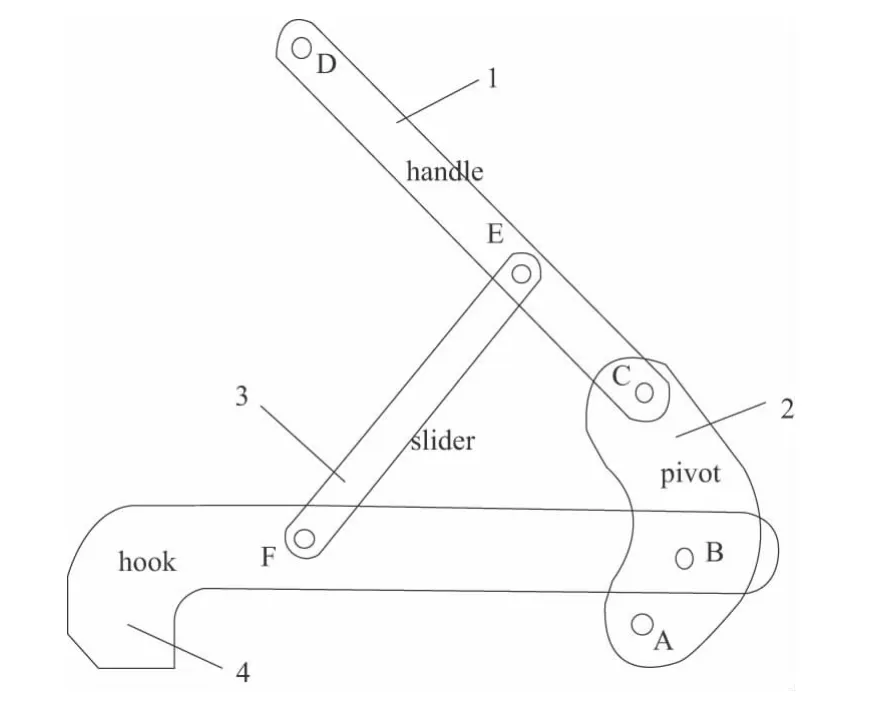
圖1 物理樣機模型
1.1 設計要求
1)能產(chǎn)生至少800 N 的夾緊力;2)手動夾緊,用力不大于80 N;3)手動松開時做功最少;4)必須在給定的空間內(nèi)工作;5)有震動時,仍能保持可靠夾緊。
1.2 彈簧掛鎖模型的工作原理
在POINT-4(D)處下壓操作手柄(handle),掛鎖就能夠夾緊。下壓時,曲柄(pivot)繞POINT-1(A)順時針轉動,將鉤子(hook)上的POINT-2(B)向后拖動,此時,連桿(slider)上的POINT-5(E)向下運動。當POINT-5(E)處于POINT-6(F)和POINT-3(C)的連線時,夾緊力達到最大值。POINT-5(E)應該在POINT-6(F)和POINT-3(C)連線的下方移動,直到操作手柄(handle)停在鉤子(hook)上部。這樣使得夾緊力接近最大值,但只需一個較小的力就可以打開掛鎖。
1.3 建立虛擬樣機模型
在ADAMS 中按照該機構的實際尺寸和形狀建立初始模型,根據(jù)實際的運動情況在各個部件之間施加相應的約束與載荷。添加約束和載荷時應注意選擇約束和載荷的類型、作用部件、作用點和方向。在依次完成導入幾何建模、約束的施加、載荷的施加后,在ADAMS 軟件中建立起來的整個虛擬樣機如圖2 所示。
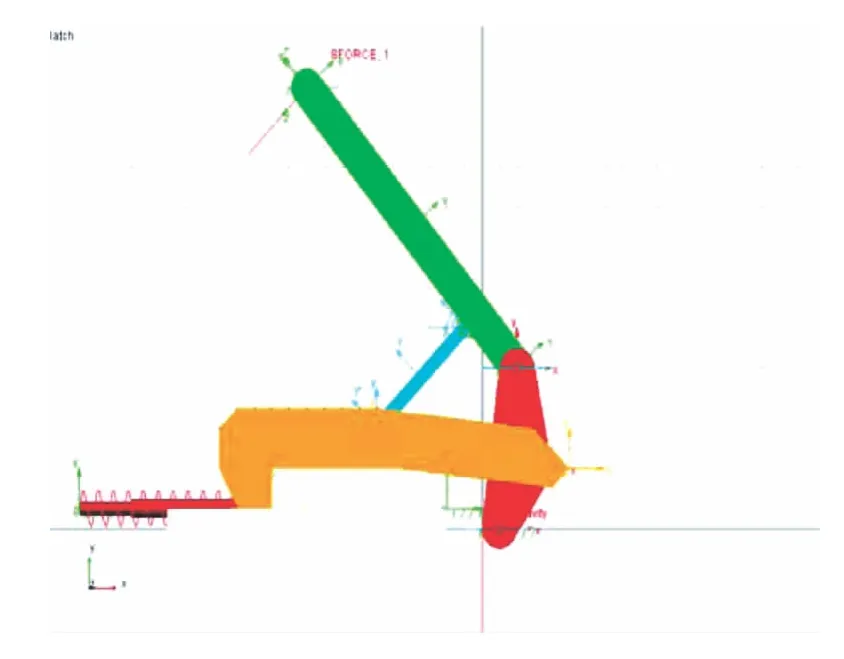
圖2 虛擬樣機模型
1.4 測試初始模型
通過作用在操作手柄上端80 N 的力來產(chǎn)生至少800 N的夾緊力,來對該機構進行一次動態(tài)仿真。當D 處于F 和C 的連線時,夾緊力達到最大值。通過測量角度來反映手柄壓下的行程,彈簧掛鎖鎖緊時,手柄需要壓過鎖緊點位置,從而保證掛鎖處于自鎖狀態(tài)。借助傳感器使該角度在不小于0°時仿真停止,再進行一次動態(tài)仿真來測量彈簧力和角度的變化值,仿真結果如圖3 所示。
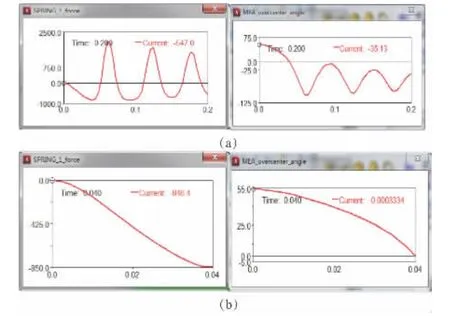
圖3 仿真結果
1.5 檢測測試結果
下面調(diào)入物理樣機試驗數(shù)據(jù),將模擬仿真結果與物理樣機試驗數(shù)據(jù)對照比較,如圖4 所示。驗證了所設計方案的可行性。
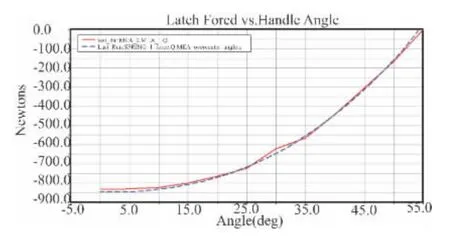
圖4 模擬樣機與物理樣機對比結果
1.6 虛擬樣機模型參數(shù)化的優(yōu)化
a)參數(shù)化模型
本文的虛擬樣機模型是依附于設計點建立的,因此采用參數(shù)化點坐標的方法。將設計點的坐標參數(shù)化,可以自動地修改與設計點有關的對象,并利用這些點產(chǎn)生新的構件,當這些設計點的參數(shù)改變時,與其相關聯(lián)的幾何形體也將自動更新,得到新的虛擬樣機模型,故通過將點的坐標參數(shù)化可以實現(xiàn)彈簧掛鎖機構模型的參數(shù)化[5]。本文將設計點POINT-1 作為原點,其參數(shù)值不變,對設計點POINT-2 一POINT-6 的橫坐標和縱坐標進行參數(shù)化處理,創(chuàng)建設計變量DV-1~DV-10。
b)優(yōu)化設計
優(yōu)化分析是ADAMS/View 提供的一種高級參數(shù)化計算、分析工具,在設定的變化范圍內(nèi),通過分析程序自動地調(diào)整設計變量,求取最佳設計。樣機優(yōu)化設計方法有2種:1)同時考慮各個設計變量,進行仿真分析,得出優(yōu)化結果,這種方法在設計變量較少時適用;2)先分別對每個設計變量進行優(yōu)化靈敏度分析,選取靈敏度最高,即對設計影響最大的幾個變量進行調(diào)整,得出優(yōu)化結果,該方法在設計變量較多時適用[6]。本文采用2)方法,優(yōu)化目標是使彈簧掛鎖機構夾緊力達到最大。
為了對虛擬樣機模型進行細化處理,需要創(chuàng)建設計變量,并對設計變量值進行設計。用設計變量代替虛擬樣機模型中設計點的x 和y 坐標值。但為了保證機構的封閉性要求,保留手柄端點point-4 坐標值為常數(shù)。設計變量設置如圖5 所示。
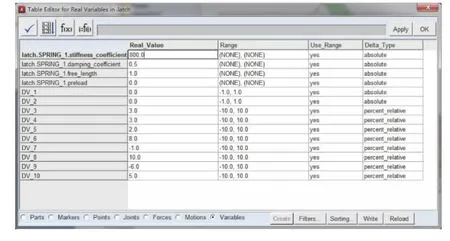
圖5 變量設置
1.7 虛擬樣機模型設計研究
為快速地獲得虛擬樣機的改善模型,在滿足手柄能通過死點的條件下,需要對一些點進行設計方案研究,從中找出一種較優(yōu)的方案使夾緊力最大,同時可以迅速確定設計變量的取值范圍。下面對其中DV-1 變量方案評估,評估結果如下圖6 所示。
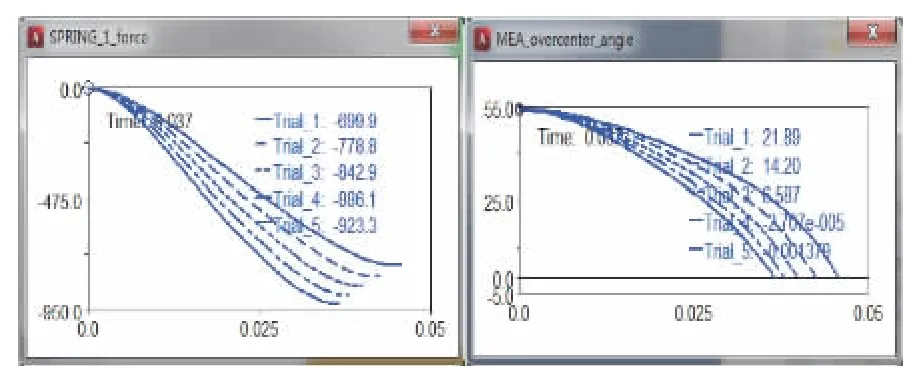
圖6 DV-1 評估結果
同理,在其余變量保持恒定的基礎上,分別對每一個變量進行設計研究,以直觀比較系統(tǒng)模型針對各個設計變量的靈敏度,結果見表1,其中敏感度定義為彈簧力相對變量的斜率。
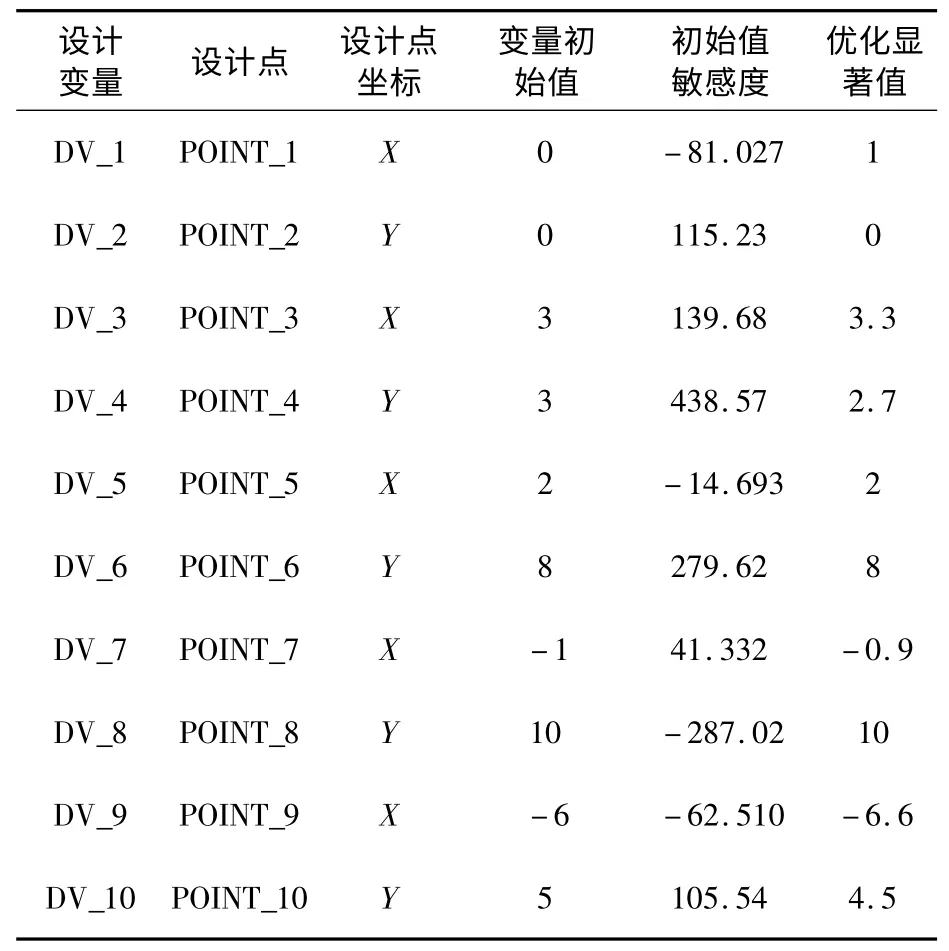
表1 變量DV-1~DV-10 靈敏度對比
優(yōu)化設計過程中,必不可少的重要環(huán)節(jié)就是評估系統(tǒng)模型針對不同設計變量的靈敏度,而靈敏度對最優(yōu)化設計時設計變量的選擇起到至關重要的作用。通過參數(shù)化可以迅速分析得知哪些設計變量對目標函數(shù)影響較大,哪些設計變量對目標函數(shù)影響較小,選擇影響較大的設計變量作為目標函數(shù)的設計變量進行優(yōu)化設計[7]。在本機構中,DV-4、DV-6 和DV-8 的敏感度最大,那么這3 個變量對該目標函數(shù)的影響最大,在接下來的優(yōu)化設計中將選擇這3 個變量作為主要目標函數(shù)的設計變量進行優(yōu)化設計。
1.8 虛擬樣機模型優(yōu)化設計
通過對DV-4、DV-6 和DV-8 的變量初始值,即設計點的相關坐標進行微調(diào),觀察比較微調(diào)前后目標函數(shù)的變化,驗證結果顯示設計模型能夠滿足優(yōu)化設計的要求,使彈簧掛鎖機構夾緊力達到最大,達到本次優(yōu)化設計目標。其優(yōu)化結果如圖7,表2 所示
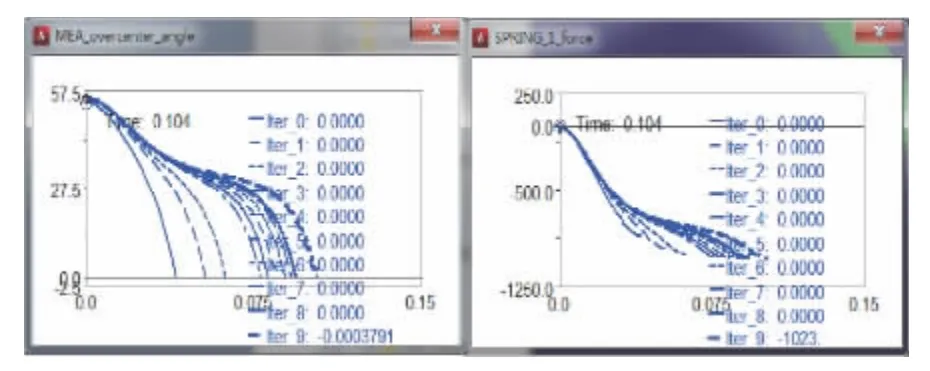
圖7 優(yōu)化結果
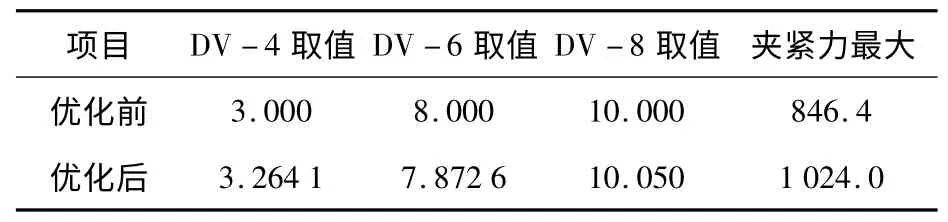
表2 優(yōu)化前后數(shù)據(jù)對比
2 結語
利用ADAMS 建立虛擬樣機模型并進行仿真優(yōu)化設計是一種簡便直觀的方法,既省去了建立機構參數(shù)與目標函數(shù)之間關系式和編程復雜程序的耗時工作,使復雜機械結構的優(yōu)化設計變得簡便易行,又提高了優(yōu)化效率,簡化了產(chǎn)品的設計過程,縮短了產(chǎn)品的研發(fā)周期,從而降低了產(chǎn)品的制造成本,為現(xiàn)代產(chǎn)品的設計提供了一種新思路。
[1]孫恒,陳作模.機械原理[M].北京:高等教育出版社,2001.
[2]王國強,張進平,馬若丁.虛擬樣機技術及其在ADAMS 上的實踐[M].西安:西北工業(yè)大學出版社,2002.
[3]李軍.邢俊文.覃文潔.ADAMS 實例教程[M].北京:北京理工大學出版社,2002.
[4](美)MSC.Software,MSC.ADAMS/view 高級培訓教程[M].李軍,陶永忠.譯.北京:清華大學出版社,2004.
[5]朱會玲,段志善,史麗晨,等.基于ADAMS 的軋管機工作機構仿真與優(yōu)化[J].煤礦機械,2009,30(11);30-32.
[6]張敏,石秀華,吳一紅.基于ADAMS 的三自由度水下機械手運動學仿真[J].機械設計與制造,2005(7):85-86.
[7]何邕,賈美薇,李萍奎,等.基于虛擬樣機的鏟運機工作裝置仿真及優(yōu)化[J].系統(tǒng)仿真學報,2011,23(4);702-706.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
井岡教育(2022年2期)2022-10-14 03:11:44
房地產(chǎn)導刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導向(2021年7期)2021-07-16 07:07:52
中學生數(shù)理化(高中版.高二數(shù)學)(2021年12期)2021-04-26 07:43:48
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:00
中學生數(shù)理化·中考版(2017年12期)2017-04-18 12:55:05