基于自適應(yīng)遺傳算法的EPS路感研究
2014-03-28 01:53:40賈滿滿朱景全
電子設(shè)計工程 2014年8期
賈滿滿,朱景全
(商丘師范學院物理與電氣信息學院,河南商丘476000)
汽車轉(zhuǎn)向過程中,轉(zhuǎn)向阻力包含有前輪側(cè)向力信息,使汽車的運動狀態(tài)(包括車輪與路面的附著狀態(tài))與駕駛員手力有對應(yīng)關(guān)系,這就是所謂的“路感”。汽車轉(zhuǎn)向過程中的轉(zhuǎn)向輕便性與路感是相互矛盾的,轉(zhuǎn)向輕便性要求轉(zhuǎn)向系統(tǒng)能夠提供大的助力,但助力增加后路感就會變差。轉(zhuǎn)向輕便性是對汽車低速行駛時提出的要求,而路感是對汽車高速行駛時提出的要求。駕駛員在行駛時只有準確地掌握汽車的行駛狀況,才能正確地操縱汽車。因此良好的路感是操縱穩(wěn)定性重要組成部分。
在機械轉(zhuǎn)向系統(tǒng)中,轉(zhuǎn)向力是由駕駛員的手動操舵力矩組成,本文所研究的電動助力轉(zhuǎn)向系統(tǒng)的轉(zhuǎn)向力是由駕駛員的手動操舵力和電動機提供的助力兩部分構(gòu)成,因而轉(zhuǎn)向路感受到電動機助力的影響。電動轉(zhuǎn)向系統(tǒng)一個重要的特性是可以增強駕駛員的轉(zhuǎn)向路感,如何既滿足汽車低速時轉(zhuǎn)向輕便性又可以在高速時獲得良好的路感是研究的重點。本文以汽車轉(zhuǎn)向路感為出發(fā)點,其分析方法不僅僅停留在路感的定性分析上,而對路感進行了理論分析和量化處理,應(yīng)用自適應(yīng)遺傳算法對系統(tǒng)參數(shù)進行了優(yōu)化設(shè)計,從而使駕駛員獲得良好的路感。
1 EPS系統(tǒng)模型
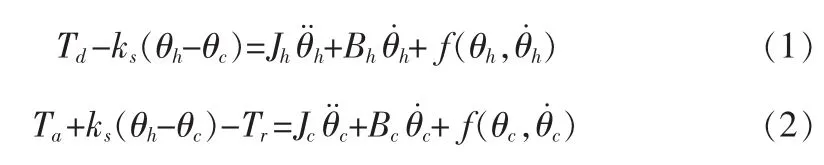
EPS(Electric Power Steering System)系統(tǒng)由扭矩傳感器、電動機、車速傳感器、電子控制單元ECU、減速機構(gòu)等組成。為分析問題方便,把轉(zhuǎn)向機構(gòu)及前輪向轉(zhuǎn)向柱簡化,簡化后的EPS系統(tǒng)模型如圖1所示[1-2]。設(shè)方向盤的轉(zhuǎn)動慣量、前輪及轉(zhuǎn)向機構(gòu)向轉(zhuǎn)向柱等效后的轉(zhuǎn)動慣量、電機的轉(zhuǎn)動慣量分別是Jh,Jc,Jm,轉(zhuǎn)向盤上施加的扭矩、等效到轉(zhuǎn)向柱的轉(zhuǎn)向阻力、電機的電磁轉(zhuǎn)矩和電機作用到轉(zhuǎn)向柱的助力分別是Td,Tr,Tm,Ta,轉(zhuǎn)向盤與支承間的摩擦系數(shù)、等效到轉(zhuǎn)向柱的轉(zhuǎn)向結(jié)構(gòu)與前輪間的摩擦系數(shù)、電動機轉(zhuǎn)軸與支承間的摩擦系數(shù)分別是Bh,Bc,Bm,方向盤轉(zhuǎn)角、電機轉(zhuǎn)角與前輪等效到轉(zhuǎn)向柱的轉(zhuǎn)角分別是θh,θm,θc,扭矩傳感器剛度是ks,從電動機到轉(zhuǎn)向柱的傳動比是G1。方向盤與支承間、等效到轉(zhuǎn)向柱的轉(zhuǎn)向機構(gòu)與前輪、電動機轉(zhuǎn)軸與支承間的摩擦力分別是f(,θh),得到如下各部件的數(shù)學模型。
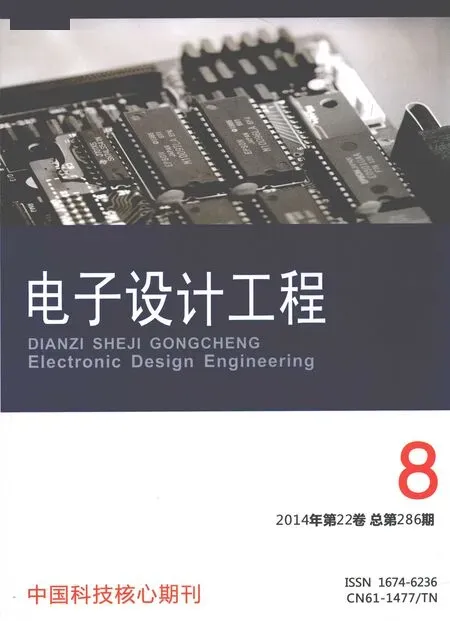
方向盤與前輪的動力學模型:
電動機對轉(zhuǎn)向柱提供的輔助力Ta可由電機的動力學方程得到。

式中,kt,ia分別為電機的電磁轉(zhuǎn)矩常數(shù)和電流。
電動機的電氣數(shù)學模型:

式中,R,L,ke分別為電機的電樞電阻、電感和反電動勢系數(shù)。
扭矩傳感器的數(shù)學模型是:

為分析問題方便,設(shè)電機轉(zhuǎn)軸是剛性的,不考慮電機的扭轉(zhuǎn)剛度,僅考慮電動機與轉(zhuǎn)向柱間的速度匹配,有

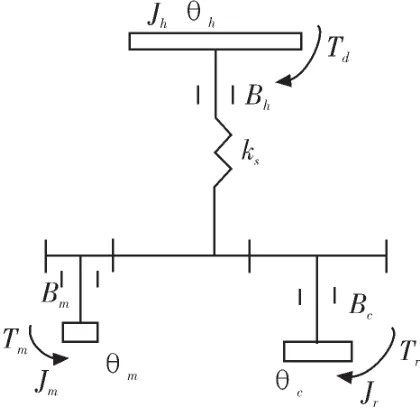
圖1 EPS系統(tǒng)動力學模型Fig.1 The dynamics model of EPS system
2 路感的定義
轉(zhuǎn)向路感是路面信息到方向盤手力的傳遞特性。即把轉(zhuǎn)向路感定義為從負載到手力的傳遞特性[4]。EPS系統(tǒng)應(yīng)具有較好的抗干擾能力,以抑制高頻噪聲和干擾信號。為分析EPS系統(tǒng)抵抗路面干擾能力,本文采用固定把持轉(zhuǎn)向盤方法。假定轉(zhuǎn)向盤固定,駕駛員的轉(zhuǎn)向手力是:

如果不考慮電動機的動態(tài)特性,采用電流比例控制方法,電動機電流為:

式中,λ為助力增益。
根據(jù)式(1)~(4)、式(7)~(9)得:

3 EPS系統(tǒng)參數(shù)優(yōu)化
3.1 EPS優(yōu)化模型
為了提高系統(tǒng)轉(zhuǎn)向路感的性能,在系統(tǒng)初步設(shè)計時用自適應(yīng)遺傳算法對路感參數(shù)進行優(yōu)化。系統(tǒng)設(shè)計參數(shù)變量為:x=[ks,Jm,G1]T。
考慮到路面信息能夠較多地傳遞到駕駛員手上,就要求轉(zhuǎn)向路感的頻域能量在一定的頻率范圍內(nèi)均值越大越好。為此建立如下目標函數(shù)表達式:

目標函數(shù)表示了路感在路面信息的有效頻率范圍[0,ω]的頻域能量平均值,ω是路面信號中有用信號的最大頻率值。本文優(yōu)化設(shè)計中取值為40 Hz。當目標函數(shù)最大時,轉(zhuǎn)向路感的傳遞特性最好。
約束條件為:EPS的基本目標是在汽車安全行駛的前提下,提高汽車轉(zhuǎn)向的輕便性,同時保證有一定的回正力矩,以改善操縱的穩(wěn)定性。因此扭矩傳感器剛度、電動機轉(zhuǎn)動慣量、助力機構(gòu)傳動比還必須滿足操穩(wěn)性要求。
3.2 自適應(yīng)遺傳算法設(shè)計
遺傳算法的基本思想是將求解問題轉(zhuǎn)化成由個體組成的演化群體,并對該群體進行一系列遺傳操作,直到求得最有解。遺傳算法包括3個基本遺傳算子:選擇、交叉和變異。自適應(yīng)遺傳算法能使交叉概率Pc和變異概率Pm隨群體的適應(yīng)度自動更改。當種群個體的適應(yīng)度趨于一致或者局部最優(yōu),Pm和Pc應(yīng)增加,為了跳出局部最優(yōu);當群體適應(yīng)度分散,Pm和Pc應(yīng)減少。為了優(yōu)良個體的生存,低于平均適應(yīng)值的個體,Pm和Pc應(yīng)選擇較大的值,為了增加新個體產(chǎn)生的速度,從而能保護優(yōu)良個體的有效模型,當全局最優(yōu)點在局部極值點附近時,此方法的搜索速度也較高。因此,自適應(yīng)遺傳算法能提供相對某個解的最優(yōu)交叉概率Pc和變異概率Pm[5-6]。
1)初始群體的生成,本文采用實數(shù)編碼并隨機生成種群規(guī)模為90的初始群體。如果系統(tǒng)中有M個參數(shù)需要優(yōu)化,則以這M個參數(shù)為分量構(gòu)成M維行向量,并將它作為個體的編碼,即Q=|q1,q2…qM|,式中Q表示一個個體;qi表示在第i個參數(shù)的空間內(nèi)隨機產(chǎn)生的一個分量。
2)適應(yīng)度函數(shù)的計算,適應(yīng)度函數(shù)的設(shè)計應(yīng)避免在進化的開始因少數(shù)性能較優(yōu)的個體適應(yīng)度過大而淹沒其他個體,使尋優(yōu)過程緩慢或出現(xiàn)未成熟收斂。為獲得滿意的動態(tài)特性,并防止產(chǎn)生超調(diào),采用誤差絕對值、誤差和誤差變化率的加權(quán)作為第k個采樣時間,第i個個體的參數(shù)選擇最小目標函數(shù)。

公式中,errori(i)為第k個采樣時間第i個個體的位置跟蹤誤差,de(i)為第i個個體的位置跟蹤誤差變化率。為了避免超調(diào),本文采用了懲罰功能,即一旦產(chǎn)生超調(diào),將超調(diào)量作為最優(yōu)指標的一項,此時最優(yōu)指標為:

遺傳算法采用適應(yīng)度函數(shù)進行選擇計算,必須進行目標函數(shù)的轉(zhuǎn)換,此時適應(yīng)度函數(shù)為

3)交叉、變異操作,交叉概率pc=0.95,變異概率為

即自適應(yīng)度越大,變異概率越小。
3.3 基于自適應(yīng)遺傳算法的參數(shù)優(yōu)化結(jié)果
利用Matlab遺傳算法與直接搜索的工具箱,并調(diào)用函數(shù)[x fval]=ga(@fitnessfun,nvars,options),編寫適應(yīng)度函數(shù),設(shè)計變量個數(shù)和其他設(shè)置選項:種群類型、種群尺度、初始種群、復(fù)制、交叉、變異、優(yōu)化設(shè)計變量的初始值、上下限賦值等。適應(yīng)度函數(shù)會影響到遺傳算法的收斂速度以及能否找到最優(yōu)解。
考慮到車速和助力增益是變化的,助力增益是隨車速變化的,因此在優(yōu)化設(shè)計前對助力增益和車速進行設(shè)定。此優(yōu)化過程中取λ=40,v=45 m/s。運行遺傳算法優(yōu)化路感參數(shù)的結(jié)果為:Jm,ks,G1的值分別為0.000 4 kg/m2,51.964 m/rad,25.64。由于減速機構(gòu)傳動比為整數(shù),所以其值取為26。優(yōu)化前后對應(yīng)的Bode圖如圖2所示。
圖2 優(yōu)化前后轉(zhuǎn)向路感的Bode圖Fig.2 Before and after optimization Bode plots of steering feel
由圖2可知,優(yōu)化后的轉(zhuǎn)向路感較優(yōu)化前帶寬增加且相位延遲減小,表明基于遺傳算法的EPS系統(tǒng)參數(shù)優(yōu)化可以有效地提高系統(tǒng)的操穩(wěn)性和轉(zhuǎn)向路感,為EPS系統(tǒng)的參數(shù)化設(shè)計提供了理論基礎(chǔ)。
根據(jù)上文對電動助力轉(zhuǎn)向系統(tǒng)的路感模型建立和分析控制器設(shè)計的基本思想,采用Matlab語言編寫自適應(yīng)遺傳算法優(yōu)化程序[7]。設(shè)采樣時間為0.001 s,輸入信號為階躍信號。輸出階躍響應(yīng)曲線如圖3所示。
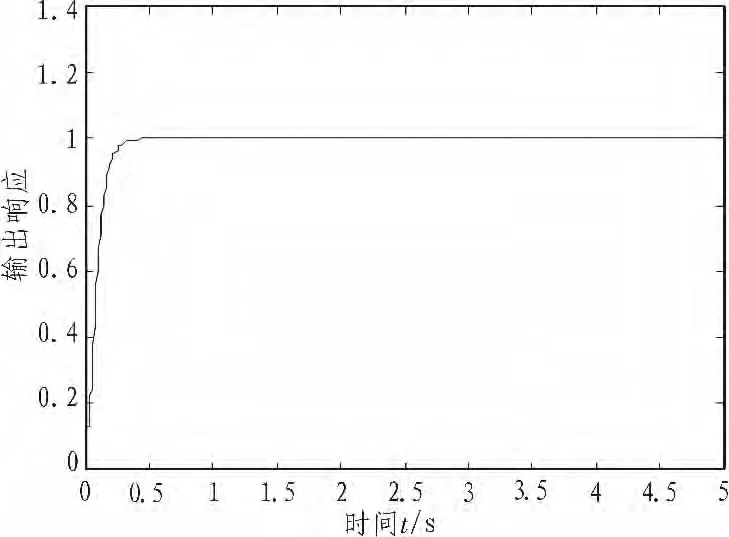
圖3 轉(zhuǎn)向路感的階躍響應(yīng)曲線Fig.3 Step response curve of steering feel
由圖3可知,基于自適應(yīng)遺傳算法優(yōu)化控制器參數(shù)的階躍響應(yīng)曲線超調(diào)量明顯降低,在0.4 s左右就達到穩(wěn)定值,從而使駕駛員獲得比較好的轉(zhuǎn)向路感。
4 結(jié)論
電動助力轉(zhuǎn)向系統(tǒng)可以良好地調(diào)和轉(zhuǎn)向輕便性和路感這一矛盾,在不同的汽車行駛條件下,可以有針對性地突出路感或者轉(zhuǎn)向輕便性的要求。另外,為保證電動助力轉(zhuǎn)向系統(tǒng)具有較好的通用性,通過遺傳算法優(yōu)化路感參數(shù)和控制器參數(shù),有效地提高了系統(tǒng)的轉(zhuǎn)向路感。可以滿足不同車型和不同用戶實際的需要。
[1] Ijiri W,Tsutsul T.Technical trends of electric power steering system[J].KOYO Engineering Journal,2003,16(2):27-31.
[2] Ji-Hoon Kim,Jae-Bok Song.Control logic for an electric power steering system using assist motor[J].Mechatronics,2002,12(5):447-459.
[3] 吳鋒,楊志家,姚棟偉,等.電動助力轉(zhuǎn)向系統(tǒng)控制策略的研究[J].汽車工程,2006,28(8):25-27.WU Feng,YANG Zhi-jia,YAO Dong-wei,et al.Study on the control strategy of electric power steering system[J].Automotive Engineering,2006,28(8):25-27.
[4] 葉耿,楊家軍,劉照,等.汽車電動式動力轉(zhuǎn)向系統(tǒng)轉(zhuǎn)向路感研究[J].華中科技大學學報,2002,30(2):24-26.YE-geng,YANG Jia-jun,LIU Zhao,et al.Study on the steering feel of electric power steering system of automobile[J].Huazhong Science University,2002,30(2):24-26.
[5] 黃永青,梁昌勇,張祥德,等.一種小種群自適應(yīng)遺傳算法研究[J].系統(tǒng)工程理論與實踐,2005,15(2):92-97.HUANG Yong-qing,LIANG Chang-yong,ZHANG Xiang-de,et al.Research on adaptive genetic algorithm with small population[J].Systems Engineering Theory and Practice,2005,15(2):92-97.
[6] 陳無畏,王妍,王啟瑞,等.汽車電動助力轉(zhuǎn)向系統(tǒng)的自適應(yīng)LQG控制[J].機械工程學報,2005,41(12):167-172.CHEN Wu-wei,WANG Yan,WANG Qi-rui,et al.Adaptive LQG control for the electric power steering system of an automobile[J].Mechanical Engineering,2005,41(12):167-172.
[7] 劉金琨.先進PID控制及其MATLAB仿真[M].北京:電子工業(yè)出版社,2003.
猜你喜歡
英語世界(2022年9期)2022-10-18 01:11:18
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學生數(shù)理化(高中版.高二數(shù)學)(2021年12期)2021-04-26 07:43:48
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
金橋(2020年9期)2020-10-27 01:59:44
中學生數(shù)理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32