Alliance車鉤內腔裝配體約束關系求解
2014-03-25 10:22:52洋任克京
中國新技術新產品 2014年8期
關鍵詞:模型
汪 洋任克京
(1.遼寧軌道交通職業學院,遼寧 沈陽 110036;遼寧省安全科學研究院,遼寧 沈陽110004)
Alliance車鉤內腔裝配體約束關系求解
汪 洋1任克京2
(1.遼寧軌道交通職業學院,遼寧 沈陽 110036;遼寧省安全科學研究院,遼寧 沈陽110004)
虛擬裝配仿真作為虛擬制造實施的核心技術之一,其主要任務是用可視化手段研究和解決產品的可裝配性問題。文中在Pro/E參數化建模的基礎上,應用其裝配模塊,以Alliance車鉤各零部件模型為應用對象,進行內腔裝配體約束關系求解。
Alliance車鉤;虛擬裝配;模型校驗;運動仿真
Alliance車鉤外形尺寸較大,內腔結構復雜。測量人員在采集車鉤鉤體尺寸數據時發現在實際測量過程中如果不切割模型,車鉤鉤體內腔中的局部數據無法采集與測量。鉤體的內腔空間與車鉤性能關聯很大,車鉤內腔空間關系必須有足夠并且恰好合適的空間來保證車鉤內腔中各零件的運動以實現車鉤功能。通過分析內腔中各零件在裝配中的功能和約束,本課題提出了基于Pro/Engineer的Assembly模塊的虛擬裝配求解鉤體內腔的方法。
1 內腔裝配體約束關系分析
裝配模型所包含的基本裝配信息主要有兩類:一是裝配體的分組和層次信息;二是裝配體之間的裝配關系信息。產品裝配模型中的裝配關系是裝配信息的重要組成部分,裝配關系直接體現了產品的功能,而且約束下層零部件的結構設計。它描述了零部件之間的相對位置、定位方向和配合關系等裝配約束信息。
在Alliance車鉤實際的裝配過程中,車鉤各零件受到多個幾何約束的作用。一個幾何約束是確定兩個約束幾何元素之間相對運動的規則,這個規則減少了包含所涉及面的零件的自由度,約束了零件的運動。并且Alliance車鉤作為一個裝配體是由多層次的零部件在多種約束下按一定關系組合起來的有機整體,而在Alliance車鉤的反求工程中,該車鉤各零件具體是在哪些約束下有機組合的是不確定的。這即是Alliance車鉤反求的一個重要任務,因此需要通過虛擬裝配來進一步分析確定車鉤各零件之間的裝配關系。
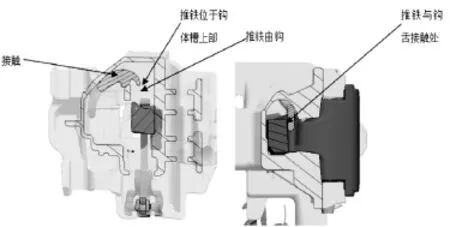
圖1 推鐵與鉤體的裝配關系
2 內腔裝配體約束關系求解
本課題Alliance車鉤的虛擬裝配是通過定義Alliance車鉤零件重構模型之間的裝配約束來實現的,也就是在各零件模型之間建立的一定的連接關系,并對其進行約束,從而確定各零件模型在空間的具體位置關系。可以說,各零件之間的裝配約束關系就是實際環境中零件之間的設計關系在虛擬環境的映射。因此通過虛擬裝配來分析求解Alliance車鉤各零件重構模型間的裝配約束關系實際上就是對Alliance車鉤實際零件之間的設計關系的一個反求和還原。
Alliance車鉤中由裝配體分解約束分析得到的裝配約束關系有下鎖銷與下鎖銷桿之間的約束關系、下鎖銷與鉤鎖鐵之間的約束關系、鉤舌與鉤舌推鐵之間的約束關系等。由于在車鉤中特別是內腔內零件在運動過程中多屬自適應零件,因此在關鍵工作位置的位姿是未知的,需要進行求解。在虛擬裝配過程中,通過對運動過程零件所在各位置的模擬,實時、交互地進行約束識別、定位,使零部件在滿足所有約束的基礎上精確地到達最終的裝配位置。
由于鉤鎖鐵、下鎖銷及鉤舌推鐵都是在鉤體內腔內活動,在非破壞性的零件分解時無法獲知它們在內腔中的裝配關系。以鉤舌推鐵為例,它不僅與鉤體橫梁接觸,還與鉤體槽接觸,并與鉤舌接觸,但具體是在什么位置、以什么姿態與這些零件約束并使其在車鉤閉鎖狀態下處于相對靜止狀態,需要通過虛擬裝配進行求解。 將Alliance車鉤各零件重構模型在Pro/ Assembly中 裝配,其中鉤舌推鐵與鉤體槽先是由插入及面對齊來約束,這只是先保證推鐵在鉤體槽軸方向的面與鉤舌槽面先平行,即先確定此約束,然后就要在取消插入約束下先將推鐵轉動并使其與橫梁曲面相接觸,再調整到與鉤舌凹槽面相接觸,且基本與內腔壁接觸。在這三個條件都滿足的情況下使鉤舌推鐵達到一個平衡,處于相對靜止狀態。實際經過鉤舌推鐵位姿的不斷調整,鉤舌推鐵兩耳是其上部的表面與鉤體槽的上部內表面相接觸,并且鉤舌推鐵與鉤舌接觸處在閉鎖狀態下不是鉤舌推鐵尾端與鉤舌凹槽接觸,而是在鉤舌凹槽靠近鉤舌上表面處與鉤舌推鐵相接觸,即下面右圖箭頭所指處。如圖1裝配模型中能清晰直觀的體現閉鎖狀態下鉤舌推鐵與鉤體、鉤舌之間的相互裝配約束關系及裝配位置。
結語
本文利用Pro/E提供的“組件”模塊實現模型的組裝。在Pro/E系統中,模型裝配的過程就是按照一定的約束條件或連接方式,將各零件組裝成一個整體并能滿足設計功能的過程。總的來說,裝配體反求設計中裝配約束求解的目的是求出滿足裝配關系的各個零件之間的相對位置和方向,從而使零件通過一定的約束關系裝配起來,使整個產品滿足特定的功能要求,裝配體約束求解問題的實質是滿足一組幾何裝配約束的推理過程。
[1]李強,王紅梅.實物反求工程中的模型重建技術[J].機械制造與自動化.2003(04):17-20.
[2] Thompson W B, Owen J C, James H, etc.Feature-based reverse engineering of mechanical parts. IEEE Transaction on Robotics an Automation,1999,15(01):57-66.
[3] 柯映林,王青,范樹遷,等.RESOFT系統架構及關鍵技術[J].浙江大學學報.2006,40(08):1327-1331.
TP39
A
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
