基于虛擬現(xiàn)實技術的中藥生產實訓仿真實現(xiàn)
2014-03-21 05:03:48項朝陽唐潤華汪小根莊義修
圖學學報 2014年1期
項朝陽,唐潤華,汪小根,莊義修
(1.廣東食品藥品職業(yè)學院電教信息中心,廣東 廣州 510520;2.廣東食品藥品職業(yè)學院中藥學院,廣東 廣州 510520)
中藥制藥是一個相當龐雜的過程,涉及十幾個甚至幾十個環(huán)節(jié);車間建設占地有一定的需求,從幾十平方米到幾千平方米;設備比較昂貴,每套設備從幾萬到幾百萬不等;實驗準備和生產周期較長,一種藥品的生產需要幾天甚至十幾天才能最終完成。高校學生和企業(yè)新員工在投入中藥生產前都需要通過實訓熟悉和了解整個生產流程,熟悉各個設備的操作規(guī)程、功能和特性,也需通過實驗來構筑必需的崗前經驗,但寄希望于生產企業(yè)專門留出完整的生產線來培訓是不現(xiàn)實的,而構建實驗場地也需要投入大量的財力物力。其次,實訓原材料消耗大,中間產品保存成本高,部分實驗還需反復進行,時間和能源上的消耗都十分可觀。此外,孤立的局部實訓和封閉的生產設備難以展現(xiàn)完整的工藝流程,難以實現(xiàn)生產安全指導、先進理念灌輸、管理要素貫徹等多方面的融合,實訓效果無法保證。
將虛擬現(xiàn)實(Virtual Reality, VR)用到中藥生產實訓上,用虛擬實現(xiàn)技術來開發(fā)虛擬場景、虛擬設備和模擬生產操作,局面則煥然一新。虛擬現(xiàn)實的臨場感、交互性和構想性等特性[1-2]可以很好地解決以上的諸多問題。生產周期控制,材料能源消耗,生產過程展現(xiàn)等問題也將迎刃而解。但是構建虛擬現(xiàn)實平臺,是一項系統(tǒng)工程,需要掌握虛擬現(xiàn)實技術,結合工作流技術,網絡技術、教育技術和專業(yè)學科知識,進行可持續(xù)化的建設。
1 生產實訓類仿真系統(tǒng)的架構
快速、靈活地構建滿足生產應用需求的仿真系統(tǒng)一直是復雜系統(tǒng)仿真所追求的目標[3]。為了讓實訓平臺靈活快捷,宜采用模塊化設計。文獻[4]通過提取與抽象,歸納了模塊化仿真系統(tǒng)的設計方法,此類仿真系統(tǒng)可以從實現(xiàn)上劃分為數據視頻及動畫存儲單元、數據處理及發(fā)布單元、虛擬設備接口單元、物理設備及3D模型單元和客戶端五大部分,如圖1所示[4]。

圖1 模塊化仿真系統(tǒng)整體框架
1.1 基于Java的實現(xiàn)嘗試
在具體實現(xiàn)方法上,文獻[4]系統(tǒng)做了基于Delphi的實現(xiàn),本文則進一步做了基于Java的嘗試。實訓平臺的工作依舊是依靠數據處理及發(fā)布單元與客戶端交互和協(xié)作來完成的。Web應用的發(fā)布借助了Apache Tomcat 6.0,局部還用到Javascript等腳本語言處理簡單交互。
文獻[4]系統(tǒng)配置采用的是C/S (Client/Server)模式,而本文系統(tǒng)采用了更為便捷的B/S(Browse/Server)模式。當管理員獲取相應權限后,可進入后臺設置學員權限與實驗流程,并控制各實驗環(huán)節(jié)的流向和結果輸出。另外,通過配置視頻、三維動畫和聲音、撲捉熱點等手段,使仿真交互更顯直觀、生動,并符合生產操作規(guī)程。學員的訪問依舊基于B/S方式,通過對Web服務器的訪問來完成網上虛擬學習和仿真操作。視頻及其它輔助文件被分門別類存放到指定的子目錄中,操作時通過JDBC(Java DataBase Connectivity, Java數據庫連接)與數據庫服務器進行聯(lián)接和交互,來控制實驗狀態(tài)和獲得仿真實驗結果。
1.2 虛擬設備接口的精簡實現(xiàn)
虛擬設備接口主要接收從物理設備及可控3D模型單元傳送過來的感應信息和狀態(tài)數據。這個環(huán)節(jié)可以通過物理感應設備接口將數據提取出來,也可以采用嵌入式技術來構建虛擬實驗設備的接口[5]。從降低經濟成本、便于系統(tǒng)擴展等角度出發(fā),采用了Quest 3D和Java相結合的方案來實現(xiàn)。先構建好3D虛擬場景,然后通過加載Quest 3D交互控件和Java語句調用3D場景來實現(xiàn)協(xié)同控制,也達到了滿足生產應用需求的虛擬仿真效果。
2 生產仿真開發(fā)精細程度與工具選取
仿真系統(tǒng)的開發(fā)精細程度應結合行業(yè)特點和生產實際考慮,功能性要優(yōu)先考慮,必須能夠真實反映生產現(xiàn)實。在保證功能性的基礎上,輕巧是首選。事實上,可以把精細程度深入到細節(jié)、局部去把控,對于重要的環(huán)節(jié)細節(jié)要重點剖析,對于次要環(huán)節(jié),能簡則簡。總之,繁簡適宜才是實現(xiàn)系統(tǒng)化工程開發(fā)的上策,也是軟件工程所倡導的原則。仿真工具的選取也宜按此思路,不應求高精尖,應結合需求特點,從實用和輕巧切入,綜合考慮功能性、擴展性、魯棒性和結構良好性。
計算機仿真工具一般可分為三類:一是通用語言,如Fortran和Algol語言等;二是仿真語言,如SIGMA、GPSS和SIMULINK等;三是可視化開發(fā)平臺軟件。前兩類通用性好,但要求開發(fā)者有較強的編程能力。第三類通過定義各種實體,設置實體屬性建立實體間聯(lián)系,主要通過配置參數和操作技巧來創(chuàng)建仿真模型,技術門檻較低,開發(fā)者可以將更多的精力轉移到工藝過程的展現(xiàn)和虛擬場景的制作。目前流行的可視化開發(fā)平臺有Vir-toolsDev,EONStudio和Quest 3D等。另外,國內也有了很大突破,典型的有北京航空航天大學的實時三維圖形平臺BH_GRAPH等[1]。
Quest 3D是一款實時圖形渲染工具,可以實現(xiàn)產品的三維展示、場景漫游以及虛擬訓練等多種功能[6]。Quest 3D最大的特點就是使用構建模塊來組成程序,這些模塊被稱為信道,每一個信道都有其特定功能。利用這些信道,不需要編寫大量復雜代碼就可以完成三維場景的建立和漫游等功能。它借助了DirectX引擎,生成的場景效果絢麗,且占用資源較少。它還提供物理引擎、路徑動畫、數據庫連接和網絡支持等功能。此外,它演示性能強大,富有現(xiàn)實感,可以實現(xiàn)相當高難度的仿真。
結合中藥仿真生產崗位突出、流程銜接緊密、操作規(guī)范嚴格、系統(tǒng)運行輕巧等特點,也為便于中藥學科專業(yè)人員協(xié)同參與,本文的中藥生產實訓仿真系統(tǒng)開發(fā)時選用了Quest 3D作為仿真工具。
3 實現(xiàn)案例與關鍵技術
虛擬現(xiàn)實仿真,一般要先做3D實體建模,然后實現(xiàn)仿真控制。整個過程可分為3D實體建模、靜態(tài)場景(含實體創(chuàng)建)、動態(tài)場景、實體按鈕偵測和控制邏輯等步驟來實施。本節(jié)以中藥制藥萬能切割機為實例,以Quest 3D為主要仿真工具,對中藥生產實訓仿真過程中遇到的關鍵問題進行了探討。
3.1 3D實體建模
由于虛擬現(xiàn)實仿真系統(tǒng)基于大量3D實體的運行得以實現(xiàn),而3D實體的運行占用大量的系統(tǒng)資源,所以3D模型創(chuàng)建的合理性對系統(tǒng)能否正常運行起著重要的作用。基于此,創(chuàng)建虛擬設備或場景要繁簡適宜,充分把控好系統(tǒng)的開發(fā)精細程度。本系統(tǒng)采用3Dmax實現(xiàn)基礎建模,建模時將模型抽象化,注重基于“點”級的對齊,減少體塊堆積,避免多余的頂點與面,控制材質使用量和貼圖大小,避免面面相疊、交叉,少用布爾運算。對于完成的設備類3D模型,按靜態(tài)機身類、按鈕類和動態(tài)實體類分別導出文件保存。分開導出的文件再導入Quest 3D平臺后,成為獨立的實體,便于動畫設置和邏輯控制。中藥制藥萬能切割機在建模完成后,可對機身、切刀機構和綠紅色按鈕分別導出相應的“.X文件”。圖2(a)是完整的萬能切割機3D模型,圖2(b)和圖2(c)是分別導出的機身、按鈕和切刀機構分拆組件圖。

圖2 萬能切割機模型及分拆組件
3.2 靜態(tài)場景創(chuàng)建手法
一般性生產靜態(tài)場景包括所有設備實體和車間場景的靜態(tài)展現(xiàn)效果。此案例簡化為整臺萬能切割機(含機身、按鈕和切刀機構等實體)。靜態(tài)場景創(chuàng)建方法如下:
(1)將建模時生成的X類型文件(含機身、按鈕和切刀機構)導入Quest 3D平臺,添加3D場景模塊和渲染模塊,將3D場景模塊設置為信道組的起始模塊,添加5個點光源和一臺OIC攝影機,再將上述模塊和信道組連接起來,構成該設備的基本場景,如圖3所示。
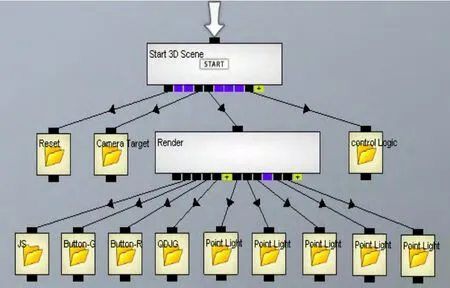
圖3 靜態(tài)場景信道流程圖
(2)將導入的實體作為一整體,將其大小和位置進行合理化調整,設置燈光的位置、強度,使設備呈現(xiàn)良好的顯示效果,確定攝影機的位置、方向和焦距,在動畫窗口查看工程攝影機顯示結果,微調至正常顯示,如圖4所示。
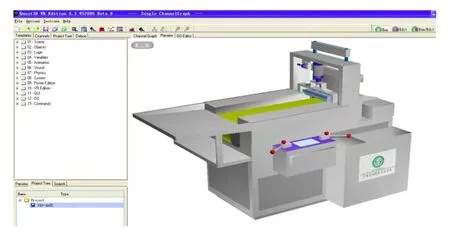
圖4 渲染模塊和信道組連接后的萬能切割機
3.3 動態(tài)場景的創(chuàng)建技巧
動態(tài)場景比靜態(tài)場景的創(chuàng)建方法復雜,通常在完成靜態(tài)場景之后實施,技巧歸納如下:
(1)設備基本是局部活動的,此刻的關注點在動態(tài)部件。首先查看動態(tài)部件實體的Motion信道組,確認導入的Motion信道組下的Value模塊類型為Envelop(因導入的模塊有可能出現(xiàn)其他Value類型),如果不是,則更換為Envelop類型模塊。
(2)切換到動畫窗口,在編輯器下方的時間軸內,將指針調到第0 格,以每6幀為一組動作設置動態(tài)部件的動作過程。
(3)添加Timer Value連接到上述Value模塊,如圖5所示,創(chuàng)建動態(tài)場景播放任務,邏輯控制信道通過控制播放任務來實現(xiàn)動態(tài)部件的啟動和停止。
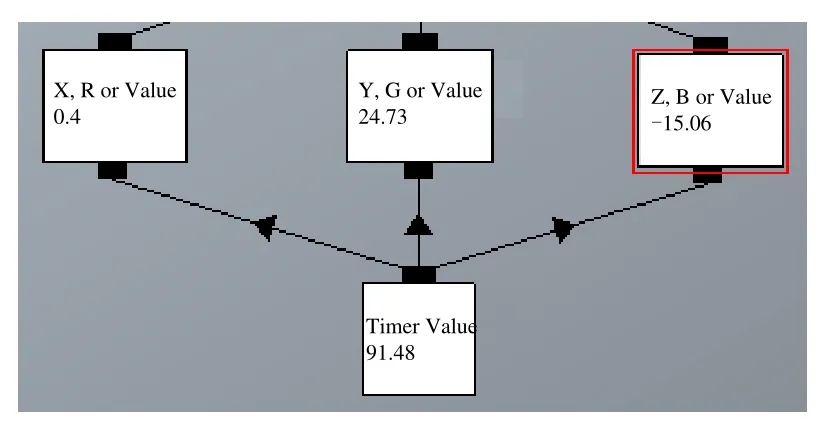
圖5 Timer Value 連接圖
3.4 鼠標碰撞偵測及高亮顯示
為實現(xiàn)逼真的仿真效果,可采用3D實體來創(chuàng)建按鈕,技術難點在于需要建立鼠標碰撞檢測和鼠標滑過高亮顯示功能。此案例中,設置綠色按鈕為啟動按鈕,按下綠色按鈕后,切刀機構上下運動。打開Button-G文件夾,該信道組由導入Button-G.X時生成,刪除下面不完整的Material模塊,從信道窗口重新添加一新Material模塊替代。將Material信道組下Diffuse模塊的(R,G,B)設置為(0,1,0),使按鈕顯示為綠色。刪掉原Emissive下的3個Envelop,添加Detect Mouse Collision與Emissive的G通道相連;創(chuàng)建Button-G的快捷方式并連接到Detect Mouse Collision模塊。這樣就實現(xiàn)了鼠標滑過綠色按鈕時的碰撞偵測及綠色按鈕高亮顯示功能,如圖6所示。
3.5 網頁展示調整技巧
系統(tǒng)需要發(fā)布成與顯示屏幕相匹配的網頁,才能正確顯示仿真效果。而Quest 3D只能按4∶3進行發(fā)布,無法與實際的顯示屏幕進行匹配。為解決這一問題,一個比較有效的做法是設計一個通用的轉換公式,利用公式在Quest 3D里對場景模塊的Y Scale值進行強制調整。設需要發(fā)布成網頁的橫、縱軸尺寸分別為X、Y,Quest 3D按4∶3進行發(fā)布,則縱軸尺寸為(3/4)*X,而實際網頁的縱軸尺寸為Y,將(3/4)*X/Y作為轉換系數,即將場景的Y-Scale值(舊)調整為Y-Scale值(新)=((3/4)*X /Y )* Y-Scale值(舊)。
在Quest 3D平臺發(fā)布網頁的index.html文件,部分代碼段做如下修訂:
…… 主站蜘蛛池模板: 亚洲性色永久网址| 欧美www在线观看| 99re免费视频| 亚洲欧美精品日韩欧美| 91免费观看视频| 在线观看视频99| 青草国产在线视频| 亚洲第一视频网| 精品久久777| 欧美高清日韩| 国产青青操| 国产制服丝袜无码视频| 免费无遮挡AV| 国产美女自慰在线观看| 国产99精品久久| 成人字幕网视频在线观看| 亚洲精品成人7777在线观看| 久久久久久国产精品mv| 国产成人夜色91| 欧美日韩国产成人在线观看| 色综合久久久久8天国| 91久久夜色精品国产网站| AV无码一区二区三区四区| 国产精品丝袜视频| 国产成人精品免费av| 国产成人喷潮在线观看| 91成人免费观看在线观看| 精品偷拍一区二区| 欧美日本在线播放| 亚洲第一中文字幕| 精品国产成人av免费| a国产精品| 国产午夜精品一区二区三| 高清色本在线www| 中文国产成人精品久久| 91精品国产情侣高潮露脸| 国产农村1级毛片| 免费毛片a| 国产欧美性爱网| 99r在线精品视频在线播放| 亚洲AV无码一区二区三区牲色| 成年女人a毛片免费视频| 亚洲无码视频一区二区三区 | 99精品在线看| 亚洲码一区二区三区| 久久一日本道色综合久久| 欧美视频二区| 亚洲色无码专线精品观看| 国产毛片久久国产| 在线综合亚洲欧美网站| 1769国产精品视频免费观看| 国产尹人香蕉综合在线电影| 91福利一区二区三区| 十八禁美女裸体网站| 99精品在线视频观看| 综合色88| 国产尤物jk自慰制服喷水| 日韩免费毛片视频| 波多野结衣视频一区二区| 精品视频一区在线观看| 久久影院一区二区h| 露脸国产精品自产在线播| 亚洲视频在线网| 夜精品a一区二区三区| 成人免费午间影院在线观看| 在线观看av永久| 午夜a视频| 欧美成人精品一区二区| 免费人成在线观看视频色| 午夜国产精品视频黄 | 国产人人射| 亚洲欧美精品日韩欧美| 青青青国产免费线在| 成人在线第一页| 国产一区免费在线观看| 久久国产精品电影| 亚洲av无码成人专区| 亚洲小视频网站| 国产精品hd在线播放| 亚欧美国产综合| 国产杨幂丝袜av在线播放| 国产精品自在在线午夜区app|