光電探測器調焦機構的設計與精度分析
2014-03-20 08:51:18高云國
激光與紅外 2014年11期
關鍵詞:振動
占 潛,高云國,于 萍
(1.中國科學院長春光學精密機械與物理研究所,吉林長春130033;2.中國科學院大學,北京100049)
約為1。
1 引言
光電探測技術作為現代信息技術的前端,廣泛應用在人類生活的各行各業之中。在對目標進行跟蹤捕獲的過程中,要想獲得高清晰度的圖像,目標必須準確地成像在CCD的感光面上。如果調焦不正確,會造成像點離散,降低目標和背景的對比度,從而影響設備的作用距離和成像質量。因此調焦機構是探測系統的重要組成部分,調焦系統的精度直接影響到光學系統的成像[1-2]。
本課題針對項目的參數要求,在常用的調焦機構基礎之上,基于密珠軸系回轉精度高、摩擦力矩小、承載能力大等優點,在保證相機的成像質量的前提下,設計了一種新型調焦機構。介紹了其組成及工作原理,詳細分析了其誤差來源及精度,最后對其進行了精度檢測和實驗論證。
2 調焦機構的設計
2.1 參數要求
為在保證分辨率、作用距離滿足要求前提下,盡量增大捕獲視場,光電探測器選擇加拿大DALAS公司的1M60相機,該相機的特點是靶面大,靈敏度高。其調焦系統的設計要求如下:
(1)工作溫度:-40~ +45℃
(2)光學設備振動范圍:16~60 Hz,加速度為1.5 g
(3)調焦晃動精度≤2″
2.2 調焦方式的選擇[3-5]
光電探測器的調焦方式主要取決于光學系統、結構形式以及調焦精度的要求。常用的調焦方式有三種:焦平面移動式、焦面反射鏡移動式和鏡組移動式。焦平面移動式是最直接的調焦方式,即調整焦平面的位置使其與像面重合。但在實際應用中往往受到機構的運動精度和結構尺寸的制約而難以實現。焦面反射鏡移動調焦即通過調整折轉光路的反射鏡來實現調焦,適用于反射式系統中。鏡組移動式是在光學系統中通過調整透鏡的位置來改變透鏡間的間距,從而達到調焦的目的。根據本探測器光學系統的結構特點,本文選擇了鏡組移動式的調焦方式,通過調整調焦鏡組位置來實現像面位置的校正。
2.3 調焦機構的設計[6-8]
一般的調焦結構設計主要有以下兩種:
a.凸輪調焦方式
凸輪傳動調焦方式的結構和裝配工藝簡單,凸輪、齒輪等運動件表面經特殊處理后無冷焊、無卡滯現象,有很好的抗沖擊振動能力。但對凸輪曲線加工精度要求較高,導致生產成本增高。
b.絲杠螺母調焦
絲杠螺母調焦方式的結構比較簡單,體積小,重量輕,便于加工且成本低。但是容易產生卡滯現象,抗振動沖擊的能力差,且調焦精度低,穩定性差。
此外,有的調焦機構還采用了蝸輪蝸桿調焦方式。其特點是可以產生較大的傳動比,缺點是體積大、質量重。
通過對這幾種調焦機構的設計對比,根據現有的加工能力以及調焦方式的精度要求,本文最終選用了一種由齒輪傳動配合螺旋傳動的密珠軸系直線運動系統。其主要零部件如圖1所示。

圖1 調焦系統結構圖Fig.1 Structure diagram of the focusingmechanism
調焦鏡通過壓圈安裝在鏡筒內,調焦鏡筒外圓面及固定筒內孔面為經過特殊處理的滾道,借助于保持架保證鋼球處在滾道內的相對位置。精密鋼球經過盈配合裝配在滾道內,相對內外滾道沿光軸的平行方向滾動,沿光軸方向旋轉運動被限,并通過直線電位計標記調焦鏡位置。電機帶動小齒輪旋轉,同時驅動大齒輪轉動,螺母與主軸間通過鋼球與軸套及限位實現主軸帶動調焦鏡作直線運動,從而實現調焦鏡組件借助于精密鋼球相對固定筒沿光軸作平移運動的功能。
這種結構主軸主要有以下幾種特點:(1)機構緊湊;(2)剛度好;(3)由于鋼球和內外圈有較高的加工精度以及誤差均勻化作用,運動精度高。
最終加工出來的調焦機構實物如圖2所示。
式中,δ1為軸套的單邊變形;δ2為主軸的單邊變形;δ為滾珠與主軸或軸套的接觸變形,當近似考慮:δ1=δ2= δ時,過盈量為 Δ =8δ。
我們國家對密珠軸系推薦采用的過盈量一般為Δ=0.002~0.004 mm,根據加工條件及實際要求,本結構采用過盈0.003 mm裝配。故:
Δ =8δ=0.003 mm
求得滾珠與主軸的接觸變形:
δ =3.75 ×10-4mm
根據赫茲理論,兩個具有曲率的滾動體接觸時,在負荷作用下產生的接觸面為橢圓形,其點接觸處的兩接觸滾動體變形量為:

圖2 調焦機構實物圖Fig.2 Real figure of the focusingmechanism
3 調焦機構計算分析
3.1 調焦機構分辨率計算
CCD相機半焦深為0.015 mm,調焦機構的分辨率處在1/3半焦深,為0.005 mm以內,能夠很好地實現調焦功能。選擇電機每轉細分400份,螺母轉一轉調焦鏡移動2 mm,齒輪傳動比為3,所以螺母轉一轉,電機轉3轉,調焦鏡分辨率:
2 mm/(3 ×400)=0.0017 mm <0.005 mm
滿足調焦分辨率要求。
3.2 調焦機構力學分析計算[9-10]
密珠軸系的主軸、滾珠和軸套采取過盈配合,適當選取過盈量,可以減小零件加工誤差的影響,提高軸系的回轉精度。
過盈量計算公式如下:

式中,dw為主軸外徑;dn為軸套內徑;d為鋼球直徑。過盈量又是軸套、主軸以及滾珠三者的變形之和,即:


其中,∑Q=Q11+Q12+Q21+Q22代表曲率和,單位1/mm;Q的兩個下標,第一個代表物體,第二個代表主曲率面,主曲率面為有最大和最小曲率值相互垂直的兩個面,且曲率中心在物體內為“+”,物體外為“-”。
②按照變壓器檢修規程的要求,在進行變壓器抽真空期間,要求變壓器內部真空度為4mbar以下,變壓器內部各處壓力均相等,并且要求保持真空至少48H;
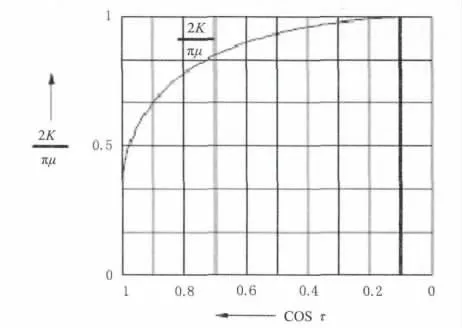
圖3 赫茲系數曲線Fig.3 Curve of Hertz coefficient

約為1。
主軸、軸套和鋼球的材料選用40Cr,鋼球直徑為9 mm,主軸的直徑為74 mm,材料的正彈性模量E=211 GPa,泊松系數ν=0.3,通過以上公式可以計算出單個鋼球受力:

本軸系每周分布6個滾珠,主軸共有54個滾珠。調焦時主軸沿軸向直線運動,與滾珠之間存在滾動摩擦,取滾動摩擦系數f=0.01,得出主軸軸向受到的摩擦阻力:

根據調焦系統的參數要求以及現有的實驗室電機設備,選擇實驗室常用的一種驅動電機,型號為:SS1704A20A;電機的外形尺寸:42.3 mm×
帶入得:
cosτ=0.057 ,查得此時42.3 mm ×49.5 mm,靜力矩為 0.54 Nm;步距角為1.8°;啟動電流為2 A 。
電機輸出軸上的齒輪z1=37;與z1嚙合的大齒輪z2=111;(齒輪壓力角 α =20°;模數m=1),螺母和主軸的螺紋配合傳動比為i=z2/z1=3。
Vz為主軸和調焦鏡直線運動速度,螺紋副螺距2 mm,調焦鏡調焦范圍3 mm,在1 s內完成調焦:

n為電機軸的轉速,n=(3/2)×3×60=270 rpm,由電機力矩與轉速特性曲線知道此時電機轉矩 t0=0.49 Nm,齒輪傳動效率 η =0.98,故電機輸出到大齒輪上的轉矩:

電機帶動小齒輪z1旋轉,同時驅動大齒輪z2轉動,大齒輪與螺母一體,螺紋副輸入力矩與輸出的軸向力計算公式近似為:

式中,K為擰緊力系數,一般取 K=0.1~0.3,對于M70 螺紋,取 K=0.2,代入得 F=102.9 N ,大于運行時受到的摩擦阻力,由此可以看出電機滿足設計要求。
3.3 調焦機構晃動精度分析
軸系在豎直平面內的晃動誤差主要是由于軸系和滾珠的不圓度引起的。其最大晃動誤差可由以下公式近似計算:

式中,ΔD為不圓度值,設計時鋼球采用零級精度,參照GB/T 308-2002,滾珠的不圓度值為0.00025mm。加工時主軸的不圓度值為0.0010 mm,軸套的為0.0025 mm。由于滾珠與主軸均位于軸套內,而軸比孔更易加工出較高精度,故取 ΔD=0.0010 mm;L為鋼球在軸向上的最大跨距,L=100 mm;K'為負載變形系數,一般取 K'=0.4~0.96,此處取K'=0.5。計算得:σmax=1.03″,滿足調焦機構設計要求。
4 調焦機構試驗
4.1 調焦機構振動實驗
調焦機構的模態要求是對其進行結構設計的基本要求,取決于機構自身的剛度。利用振動實驗對調焦機構進行模態分析,可以避免其在工作時達到共振影響機構精度。
項目要求光學設備工作振動頻率在16~60 Hz,為了確保調焦機構在工作頻率范圍內不會因為共振而破壞機構精度,在振動實驗臺上對調焦機構進行1.5 g正弦振動試驗,振動方向垂直軸向。實驗如圖4所示。

圖4 調焦機構振動實驗Fig.4 Vibration experiment of the focusingmechanism
實驗得出的調焦機構頻率響應曲線如圖5所示。

圖5 調焦機構頻率響應曲線Fig.5 Frequency response curve of the focusingmechanism
從曲線圖可以看出,在要求的工作頻率范圍內該調焦機構結構力學特性好,不會出現共振,能夠平穩地運行,具有良好的剛度,滿足工作需求。
4.2 振動前后晃動實驗
由于本調焦機構采用的是鏡組移動式的調焦方式,調焦組鏡的晃動量是影響調焦效果的主要因素,故本文主要對調焦機構進行晃動精度實驗分析,實驗如圖6所示。

圖6 隔振臺調焦機構晃動實驗Fig.6 Shaking precision experiment of the focusingmechanism
為了驗證在振動前后調焦系統的精度是否受到影響,在常溫下對調焦機構振前和振后進行晃動精度實驗對比。
將調焦系統置于隔振臺上,用0.2″自準值平行光管作為檢測工具,通過平行光管讀取平面鏡成像的數據。用計算機進行編程驅動電機轉動,帶動主軸進行直線運動,每運行1 mm進行一次計數,分別記錄機構在運行過程中水平方向和垂直方向上的晃動量。實驗數據整理之后的曲線圖如圖7和圖8所示。

圖7 振動前后水平方向晃動精度實驗數據對比Fig.7 Curve of horizontal shaking precision after vibration

圖8 振動前后垂直方向晃動精度實驗數據對比Fig.8 Curve of vertical shaking precision after vibration
由圖7、圖8可知,使用0.2″自準值平行光管作為檢測量具,可以看出在要求的振動頻率范圍內調焦系統能夠保持較高精度,水平方向和垂直方向上的最大晃動量均在2″以內,滿足光學設備的精度要求。
5 結論
根據探測器總體技術指標要求,本文設計了一種密珠軸系調焦機構,將電機轉動轉化為主軸沿軸向的高精度直線運動,從而調整透鏡組的位置來實現像面位置的校正。最終加工出來的調焦機構外形尺寸為200 mm×200 mm×140 mm。通過對該機構進行振動實驗和晃動精度實驗可知,該調焦機構具有一定的剛度,在要求的工作振動頻率內能夠很好地實現調焦功能,晃動精度小于2″。總體來說,該機構具有結構緊湊、運行平穩、晃動精度高等特點,滿足系統的設計要求,同時也為密珠軸系在探測器調焦系統中的應用提供了范例。
[1] JIANG Hanyuan,LIXuelei,ZHANG Tao,et al.Research on automatic focusing system for theodolite'image measurement[J].Computer Measurement and Control,2010,18(1):183 -185.(in Chinese)蔣漢元,李雪雷,張濤,等.光電經緯儀圖像測量中的自動調焦系統研究[J].計算機測量與控制,2010,18(1):183-185.
[2] GAO Fei,ZHANG Bao,LIU Dayu.Study on the test for a kind of Aerospace Remote Sensor's Focusing Structure[J].Journal of Changchun University of Science and Technology:Natural Science Edition,2008,31(2):30 -32.(in Chinese)高飛,張葆,劉大禹.一種航天遙感器調焦機構實驗研究[J].長春理工大學學報:自然科學版,2008,31(2):30-32
[3] AN Yuan,QIYingchun.Design of Straight- line focusing mechanism for space camera[J].Optics and Precision Engineering,2009,17(3):609 -614.(in Chinese)安源,齊迎春.空間相機直線調焦機構的設計[J].光學 精密工程,2009,17(3):609-614
[4] SHAOMingdong,GUO Jiang,SUN Jiming.Design of focusingmechanism for off- axis TMA mapping cameras[J].Chinese Optics,2012,5(4):373 -379.(in Chinese)邵明東,郭疆,孫繼明.離軸三反測繪相機調焦機構的設計[J].中國光學,2012,5(4):373 -379.
[5] DING Yalin,TIAN Haiying,WANG Jiaqi.Design on the focusing mechanism of space remote-sensing camera[J].Optics and Precision Engineering,2001,9(1):35 -38.(in Chinese)丁亞林,田海英,王家騏.空間遙感相機調焦機構設計[J].光學 精密工程,2001,9(1):35 -38.
[6] ZHANG Xinjie,YAN Changxiang,XIE Tao.Design of fo-cusingmechanism of space remote sensor[J].Optics and Precision Engineering,2009,17(11):2757 - 2761.(in Chinese)張新潔,顏昌翔,謝濤.星載光學遙感器調焦機構的設計[J].光學 精密工程,2009,17(11):2757 -2761.
[7] JIA Xuezhi,WANG Dong,ZHANG Lei,et al.Optimizing design and precision experiment of focusingmechanism in lightweight space camera[J].Optics and Precision Engineering,2011,19(8):1824 -1830.(in Chinese)賈學志,王棟,張雷,等.輕型空間相機調焦機構的優化設計與精度試驗[J].光學 精密工程,2011,19(8):1824-1830.
[8] HUANG Heping,XIA Yinhui,AN Chengbin,et al.Design on the focusing mechanism of long focus IR system[J].Laser& Infrared,2005,35(10):745 -747.(in Chinese)黃和平,夏寅輝,安成斌,等.大口徑、長焦距紅外系統調焦機構設計[J].激光與紅外,2005,35(10):745-747.
[9] MAO Shuyue.Design andmanufacture of closed-packed ball bearings[J].Journal of Chinese Inertial Technology,1991,1:73 -79.(in Chinese)毛書越.密珠軸系的設計與制造[J].中國慣性技術學報,1991,1:73 -79.
[10] LIU Ying.Fundamentals of Mechanical Design[M].Beijing:Central Radio & TV University Press,2006.(in Chinese)劉穎.機械設計基礎[M].北京:中央廣播電視大學出版社,2006.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
大電機技術(2022年5期)2022-11-17 08:12:48
天天愛科學(2020年6期)2020-09-10 07:22:44
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數學物理學報(2018年4期)2018-09-14 03:40:58
數學物理學報(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動控制(2015年4期)2015-01-01 07:08:44
計算物理(2014年2期)2014-03-11 17:01:44
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:00
