光刻機E-Pin升降機構的控制系統設計
2014-03-08 06:41:12徐加彥陳興林范文超張廣瑩
自動化與儀表 2014年7期
徐加彥,陳興林,范文超,張廣瑩
(哈爾濱工業大學 航天學院,哈爾濱 150001)
集成電路的不斷發展對科技和生活產生了日新月異的影響。根據摩爾定律,每18個月,集成電路的晶體管數量增加1倍,性能也提高1倍,但是價格保持不變。在集成電路集成度不斷提高的過程中,集成電路的制造技術起到了不可替代的作用。光刻機是集成電路的制造裝備,它將設計好的電路版圖轉移到硅片上形成集成電路,是集成電路發展的關鍵所在[1]。光刻機E-Pin升降機構作為光刻機的一部分,其作用是吸附硅片做上下往復運動,是光刻技術硅片定位的重要部分。本文設計的光刻機E-Pin升降機構的控制系統是利用IR2130芯片設計功率放大電路來控制H橋,從而驅動音圈電機執行機構。LVDT位移傳感器獲取模擬信號,通過AD將模擬信號轉變成數字信號,利用FPGA具有可編程靈活性的特點,在FPGA里編程設計電路定義通信傳輸協議,并采用RS485串口將數字信號傳輸到DSP,提高了信號采集的準確性、穩定性,保證了整個控制系統的精度。DSP2812內部集成了電機控制的許多外設模塊,同時集成了Flash存儲器和隨機存儲器RAM,適合運動控制場合。所以在本控制系統中DSP2812作為核心控制器,用于控制算法的實現,滿足整個控制系統的快速性、準確性的要求。該光刻機E-Pin升降機構控制系統在國家重大專項02專項子項目“雙工件臺系統樣機的研發”的應用實驗中,準確性、快速性、穩定性達到設計要求。
1 控制系統總體方案
如圖1所示,整個系統由運動控制模塊、傳感器模塊、執行機構、驅動電路、接口電路模塊組成。
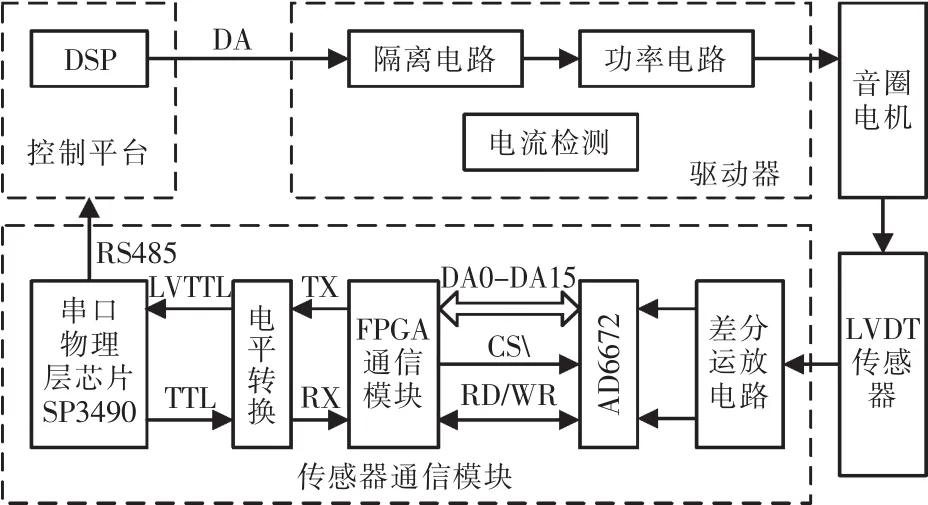
圖1 總體設計方案框圖Fig.1 Overall design diagram
運動控制模塊 采用DSP2812作為核心控制器;通過SCI中斷不斷實時更新采集的傳感器高度,將傳感器采集的高度信號進行數字濾波后,計算傳感器的高度;在中斷子程序中通過控制算法對執行機構進行控制。
傳感器模塊 采用LVDT位移傳感器獲取音圈電機的高度,在FPGA定義通信協議,通過串口URAT傳輸。
執行機構 采用音圈電機作為執行機構。音圈電機具有高頻響應、精度高、直接驅動等優點,被廣泛應用于行程小但精度要求很高的控制系統中。
驅動電路 采用美國整流公司的IR2130驅動芯片設計功率驅動放大電路,用以驅動H橋電路來控制音圈電機。
2 硬件系統設計
2.1 傳感器模塊
位移傳感器采用英國RDP公司的LVDT位移傳感器。LVDT電感式位移傳感器是由1個初級線圈和2個二次線圈組成,線圈纏繞在空心軸上,磁芯可以在空心軸中移動。初級線圈連接到1個激勵的交流電源,當磁芯移動時,在二次線圈中形成互感電流。二次線圈A和B以串聯的方式連接,Va和Vb反相輸出,傳感器的輸出為Va與Vb之差[2]。當鐵芯處于中心位置時,二次線圈產生等量但反相的電壓,此時輸出為0;當鐵芯向某一方向移動時,二次線圈中的電壓升高或者降低,另一個二次線圈電壓變化則相反。傳感器的電壓輸出與音圈電機位移成正比,因此,知道勵磁信號的輸出電壓和相位就能確定音圈電機的位置和運動方向。
2.2 信號采集模塊
信號采集模塊整體框架如圖2所示。LVDT位移傳感器的輸出信號是-5 V~+5 V的模擬電壓。模擬信號經過AD芯片,轉換為數字信號輸出給FPGA,并在FPGA中定義通信傳輸協議。
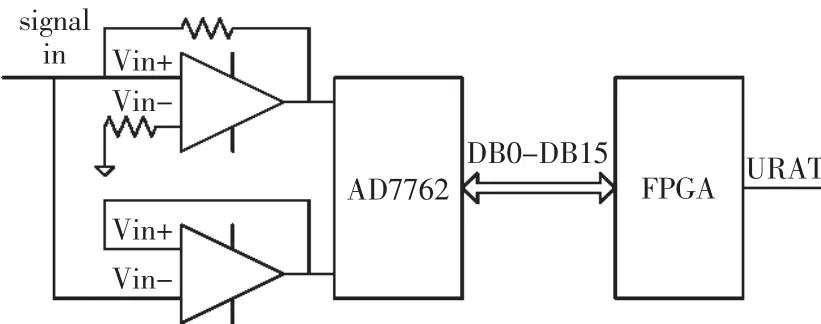
圖2 信號采集模塊的設計方案Fig.2 Design diagram of signal acquisition module
將LVDT輸出的模擬信號給AD之前,需將單路的模擬信號轉換為雙路的差分信號。設計的電路如圖3所示,為了保證信號精度,差分電路需采用精度為0.1%的高精度電阻。
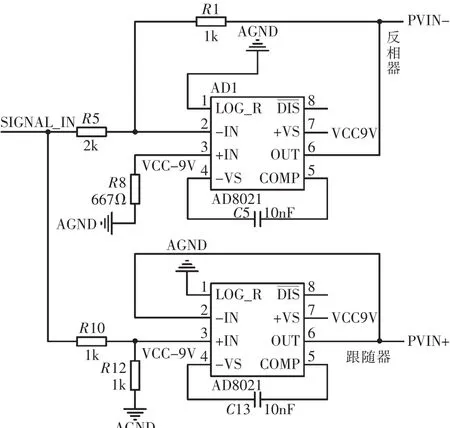
圖3 差分運放電路Fig.3 Differential-operational amplifying circuit
模數轉換芯片采用ADI公司的AD7762芯片,AD7762是一款高性能、24位輸出、高帶寬的高性能芯片,該芯片內置低通數字FIR濾波器,最高采樣頻率為40 MHz。當以625 kSPS采樣時,信噪比可達106 dB,因此選用此款芯片進行高速數據的采集。AD7762讀寫時序如圖4、5所示。
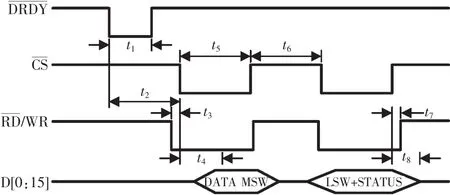
圖4 數據讀取時序圖Fig.4 Parallel interface timing diagram
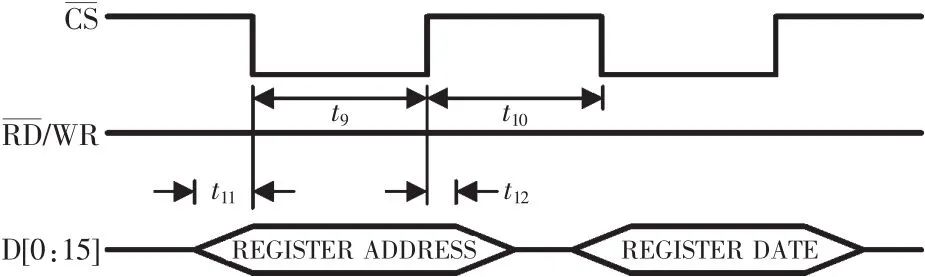
圖5 數據寫入時序圖Fig.5 Register write timing diagram
FPGA選用Altera公司的EP3C25E144C3N,利用Quartus 11.0軟件對FPGA進行編程,從而實現AD7762的數據讀寫時序和信號傳輸通信協議[4]。
通信協議中通信波特率設置為115200 b/s,前2個字節作為起始位的判斷標志。
DSP2812處理器通過RS485串口來讀取信號采集模塊的數據,來獲得音圈電機的實時高度。
圖6為外力驅動音圈電機位移曲線,外力為往復運動規律,X軸表示采集點數,采集頻率為10 Hz,Y軸表示音圈電機的位移。
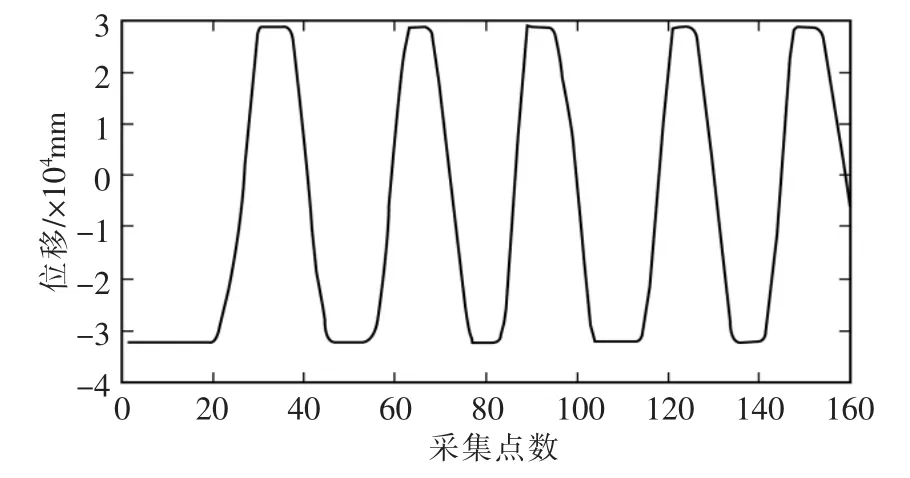
圖6 對信號采集模塊測試仿真曲線圖Fig.6 Simulation diagram of signal acquisition module
從圖中可以看出,實驗數據采集頻率達到設計要求,滿足實驗需要。
3 驅動電路模塊
功率驅動放大電路芯片采用美國整流器公司生產的IR2130驅動芯片。IR2130是一款高電壓、高速度驅動芯片,通過3個獨立的高側和低側輸出通道來驅動MOSFET和IGBT。內置運算放大器通過外部電流敏感電阻來提供橋電流的模擬反饋[3]。
IR2130的開關時間只有425 ns,死區時間只有2.5 μs,滿足驅動要求。圖7為設計的功率驅動放大電路。
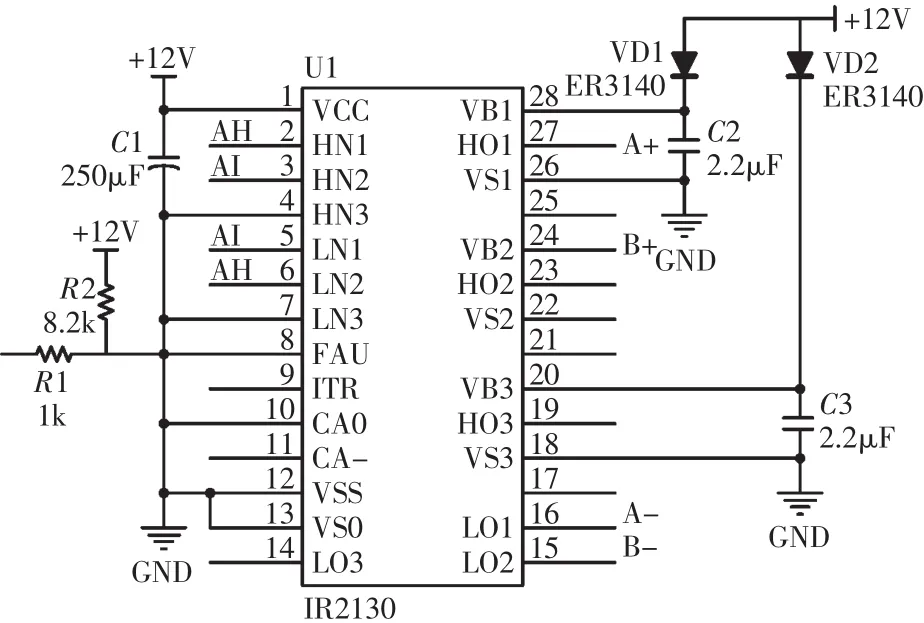
圖7 功率驅動放大電路Fig.7 Power amplifier circuit
4 運動控制模塊
控制系統采用DSP2812作為控制器,2000系列的DSP主要特點是內部集成了很多電機控制所需的外設模塊,同時還集成了一定容量的FLASH存儲器和隨機存儲器RAM,時鐘頻率為150 MHz,所以該系列的DSP非常適合應用于實時性要求不高的運動控制場合[5]。
4.1 算法設計與實現
軟件部分使用CCS3.3軟件編程,CCS3.3是TI公司的一款高性能開發軟件,可以開發除了TI3000系列以外的所有DSP[6]。控制系統程序流程如圖8所示,通過位置環對音圈電機執行機構進行閉環控制。控制系統過程中對讀取的音圈電機數字高度進行FIR濾波,以減少由于傳感器通信模塊的傳輸錯誤造成的誤差。
測量的實時性是提高控制精度的重要因素[7]。從FPGA傳輸出來的音圈電機位移數據,實時不斷通過RS485發出,在算法中通過SCI中斷來讀取RS485的數據。RS485是以8位的數據格式發出數據,SCI中斷子程序根據通信協議將接收到的數據解析成16位的音圈電機實時高度。
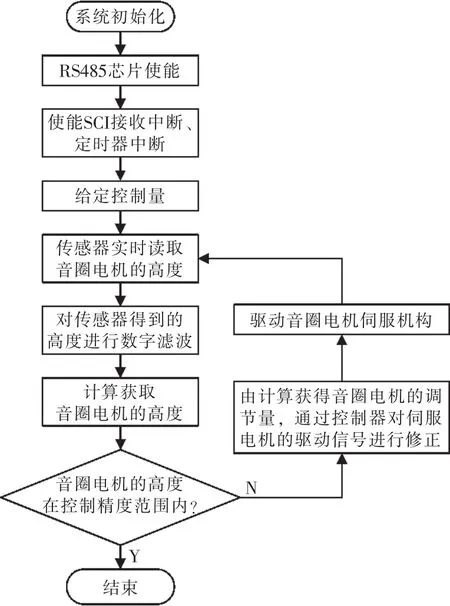
圖8 控制系統的程序流程圖Fig.8 Program flow chart of control system
根據判斷是否按照順序依次接收到AA、55,若滿足條件,則取后兩位按照順序高低位拼接成16位數據。若不滿足條件,則舍棄。
SCI中斷子程序:接收信號采集卡不斷傳輸的數據,并根據上述通信協議確定音圈電機的高度,實時更新數據。
定時器中斷:讀取音圈電機的高度,并通過改進的PID算法對音圈電機控制。通過程序調試發現,定時中斷為1 ms時效果較好。
4.2 設計系統測試結果
給定音圈電機執行機構階躍信號,音圈電機的響應曲線如圖9所示。
根據響應曲線計算得到E-Pin升降機構控制系統的穩態誤差為0,超調量σ%=21.893%,調節時間tS=0.5 s,說明設計的控制系統穩定性、準確性、快速性滿足要求。
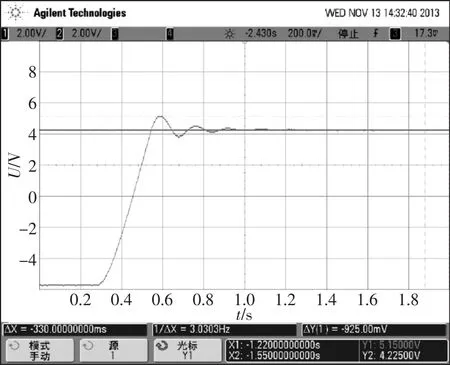
圖9 音圈電機的響應曲線Fig.9 Response curve of the voice coil motor
5 結語
本文針對E-Pin升降機構吸附硅片準確定位問題,采用TI公司2000系列的DSP和Altera公司的FPGA,設計信號采集模塊,自定義信號傳輸協議,以音圈電機作為執行機構,設計了E-Pin升降機構的控制系統,實現對吸附的硅片在上下直線運動中快速準確定位。通過實驗表明,控制系統的準確性、快速性、穩定性達到要求。
[1] 谷林.光刻機工件臺和掩膜臺同步控制研究[D].哈爾濱:哈爾濱工業大學,2013.
[2] 戴克中.一種新型的 LVDT 傳感器[J].傳感器技術,1991,3(1):19-20.
[3] 劉麗麗.音圈電機位置伺服控制系統的研究[D].哈爾濱:哈爾濱工業大學,2010.
[4] 夏宇聞.Verilog數字系統設計[M].北京:北京航空航天大學出版社,2008.
[5] 蘇奎峰,呂強.DSP原理及C語言程序開發[M].北京:北京航空航天大學出版社,2008.
[6] 萬明山.TMS320F281X DSP原理及應用實例[M].北京:北京航空航天大學出版社,2007.
[7] 陳興林,劉川.精密運動控制平臺宏微控制系統的設計[J].中南大學學報,2013,6(6):2318-2322. ■
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中國生殖健康(2019年3期)2019-02-01 06:12:26
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
