海洋結構與船舶有限元模型空間識別方法
2014-03-08 06:43:20單威俊陳坤坤
艦船科學技術 2014年5期
單威俊,許 方,陳坤坤,周 煒
(中國船舶科學研究中心,江蘇無錫 214082)
海洋結構與船舶有限元模型空間識別方法
單威俊,許 方,陳坤坤,周 煒
(中國船舶科學研究中心,江蘇無錫 214082)
海洋結構物與船舶進行結構強度有限元規范校核時,需要從網格數量龐大的模型中分離出空間單元,采用純手工方式提取,操作繁瑣,耗時且易漏選、錯選。針對此問題本文以船舶為例,對有限元模型空間識別方法進行探索,提出“切分拼接”的方法。研究表明:先利用模型中的自由邊對內部結構單元進行過濾,然后根據結構相交對模型進行切分,最后依據一定的規則將切分出來的面拼接成艙室空間的方法,能夠為編程實現船舶與海洋結構物空間自動識別提供可行的方法。
海洋結構;船舶;有限元模型;空間識別
0 引言
國際船級社協會 (IACS)在共同結構規范(CSR)基礎上,開發的協調后的共同結構規范(HCSR),預計2014年年中生效[1],這就意味著在這個時間之后簽訂合同的油船和散貨船都要符合HCSR規范。目前,國際上各大船級社都在緊鑼密鼓的針對 HCSR規范研發相應的校核軟件[2-3]。HCSR規范對于腐蝕屬性的創建、屈曲、屈服和疲勞計算的載荷加載,都和艙室空間的類型、結構類型、內部構件單元以及艙室特性相關。MSC.PATRAN是工業領域尤其結構領域著名的有限元前后處理及分析系統,但基于PATRAN用手工分離結構的網格單元和艙室空間的邊界單元,操作繁瑣,耗時較長,效率低且易出錯。并且在HCSR規范中,極有可能要求對船中以外區域和首/尾貨艙模型進行評估分析,而首/尾部的艙室模型由于型線的變化手工操作更加復雜。因此,迫切需要開發出結構自動識別和艙室自動識別系統,以期能夠準確識別出艙室的結構、艙室或者空間的邊界網格單元,來提高審圖驗船人員的分析效率。所以,基于有限元模型的結構和艙室空間識別技術的研究就顯得尤為重要和緊迫。在整個規范校核軟件系統中,結構識別和艙室空間自動識別算法是系統準確性與否、性能高低的關鍵。
1 結構識別
結構識別是識別艙室空間的必要條件。船舶結構規范校核之前,需要根據規范對模型進行結構定義,包括結構對應的網格單元分組及水密或非水密等其他規范屬性。定義屬性時,根據單元所在的結構和艙室的類型,獲取不同的腐蝕環境,便于自動創建腐蝕屬性。CSR規范軟件中的結構識別方法是手工選擇單元搜索,由于結構較多,手工操作繁瑣,雖然搜索較準確,但工作量比較大。本文提出可以根據一些模型的參數和結構的位置特性,由程序自動識別結構。把一些簡單的、位置特性明顯的結構自動識別出來,從而節省結構識別時間,簡化操作過程。
1.1 方法描述
本文提及的結構識別方法以模型參數和結構的位置特性為基礎。例如根據模型的橫剖面參數,計算出外殼、甲板、內底等結構的位置信息,然后隨機搜索到一個符合條件的網格單元,即可實現自動識別結構并創建分組。
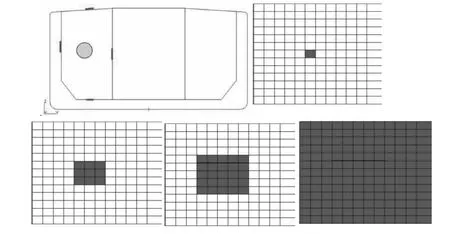
圖1 結構識別Fig.1 Structural identification
可通過編程實現自動從起始單元開始,通過公共節點、公共邊 (edges)和網格單元之間的拓撲關系,搜索相臨單元,不斷循環搜索,直至完成一個結構的識別[4]。對于平面結構如甲板和內底等,可用單元的法向過濾掉與目標結構垂直或成一定角度的單元。根據單元任意3個節點p1,p2和p3,由式(1)~式(3)求得起始單元的法向量作為基準向量。搜索與起始單元鄰接的所有單元保存在{ElemPending}集合中并過濾掉梁單元。
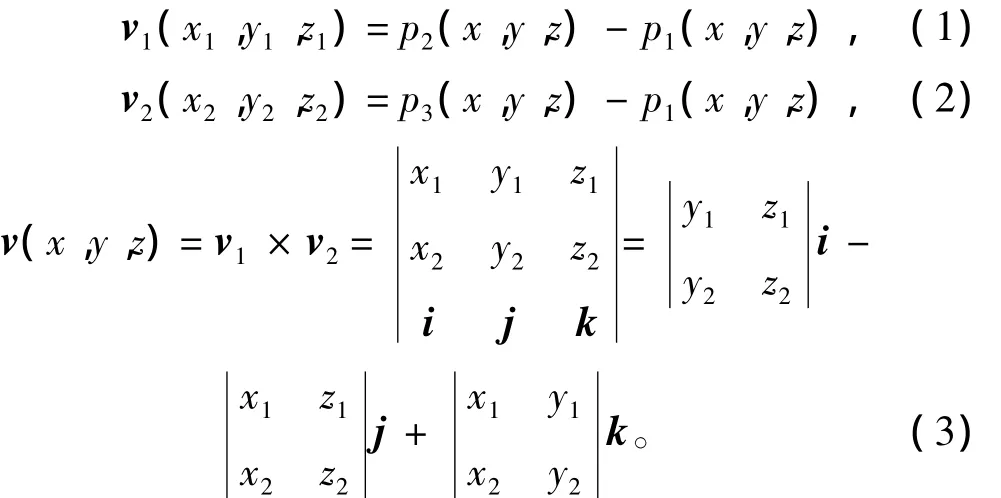
利用式(1)~式(3)計算出 { ElemPending}中每個單元的法向量,根據式(4)求得單元法向量和基準向量夾角,過濾掉法向量不平行于起始單元的非目標結構單元,將結構單元和起始單元一并存入{ E lemPanel}集合中。

對于槽型橫縱艙壁,在對鄰接單元集合{ElemPending}進行判斷時,加入相接單元的公共邊同時存在3個單元或以上的限制條件即可。針對不能通過位置就判斷出來,可以結合手工判定,盡量減少手工調整的工作量,最終實現整條船的結構識別。識別流程如圖2所示。
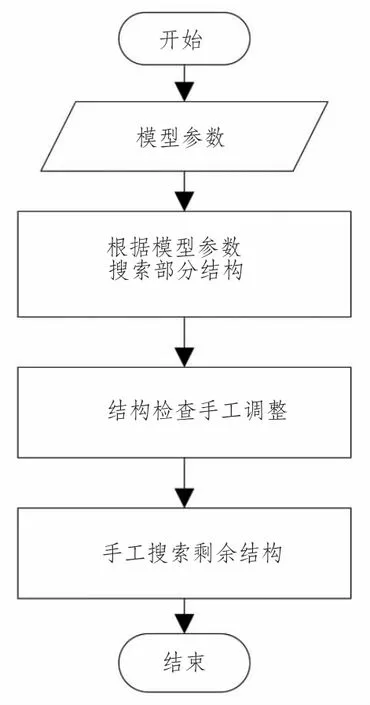
圖2 結構識別流程Fig.2 Structural identification flow
結構網格單元自動識別后,保存在相應的結構組中,可以根據結構之間的相連或相交關系自動把結構切分成多個塊,在艙室識別中使用。
1.2 輸入參數
根據船型給出剖面參數,在模型的剖面參數基礎上進行自動識別結構,以下列出幾種基本船型的橫剖面,橫艙壁位置處的結構還需要模型的縱剖面參數,例如橫艙壁橫向位置 (x)。
1)單弦側和雙舷側散貨船參數需如圖3所示的d1,d2,d3(d4),h1,h2,h3,h4,h5和橫艙壁位置。
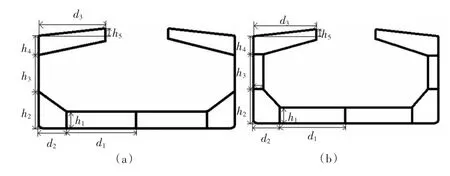
圖3 單/雙弦側散貨船橫剖面Fig.3 Transverse section of single/double hull bulk carrier
2)1道和2道縱艙壁油船參數需如圖4所示的d1,d2,d4(d3),h1,h2,h3和艙壁位置。
以甲板上的起始單元Elemstart為例,起始單元坐標范圍確定方法見式(5)~式(7),遍歷模型中的單元,找到單元型心坐標符合該坐標范圍的任一單元即可,其余結構起始單元確定方式可類推。
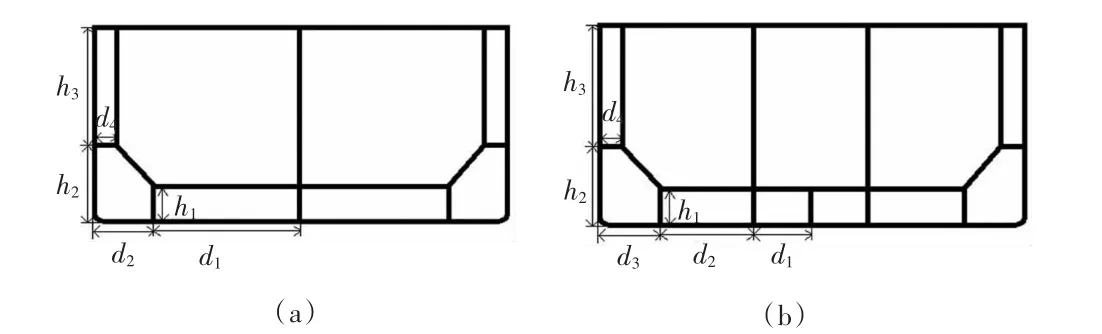
圖4 1道/2道縱艙壁油船模型橫剖面Fig.4 Transverse section of single/double longitudinal bulkhead tanker
1.3 識別對象
結構識別針對散貨船和油船船中區域,包括甲板、外殼、內底板、內殼板、槽型縱艙壁、槽型橫艙壁、底邊艙斜板、底邊艙橫隔板等結構。結構識別完成后模型中的每個單元都應該屬于且只屬于一個結構組。預計根據橫剖面參數,散貨船船中區可自動識別的結構如表1所示,油船可自動識別的結構類似。
據對某實船船中區有限元模型的研究,模型中包含結構24個,由橫剖面參數判定出起始單元,進而可實現自動識別網格單元精度為100%的結構可達14個,占結構總數的比例近60%。相對與純手工提取結構單元,大大減少了搜索的時間以及驗船師的手工操作。
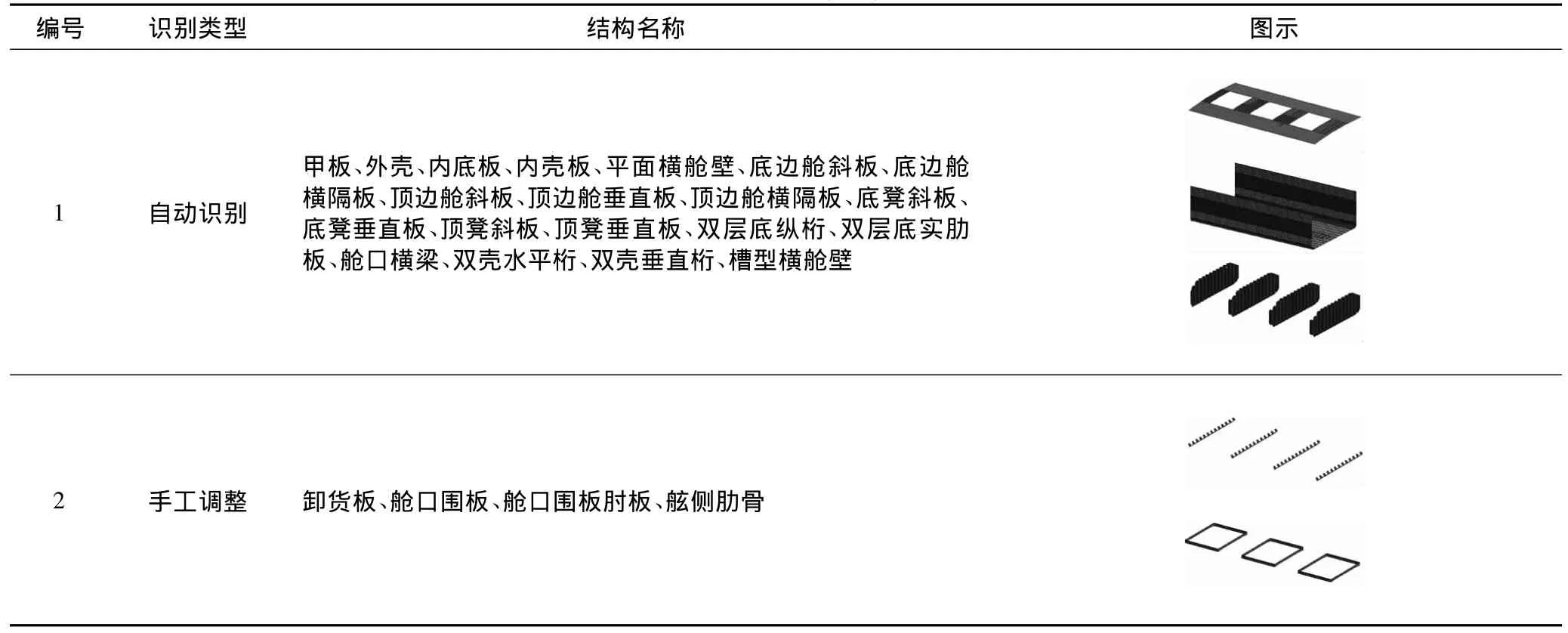
表1 識別對象Tab.1 Identify object
2 艙室識別
2.1 相關研究
三維空間模型邊界的確定在地質學、圖形學、工業制造等領域有廣泛的涉及。但船舶有限元模型空間的識別與普通三維空間邊界的確定既有區別又有一定的聯系。普通三維空間的識別大都基于CAD模型,而船舶有限元模型基于CAE,船舶有限元模型單元數量一般較大,大型船舶有限元模型的單元個數超過數十萬,網格單元之間的拓撲關系也比較復雜,識別的對象是每個單元個體組成的邊界,而普通三維空間模型邊界的確定卻基于面和體。其共同點是都需要確定搜索空間的邊界。
三維空間邊界的確定研究較多。張奇華等[4]基于拓撲學有關原理,建立了“有向性”和“封閉性”概念,提出了全空間塊體搜索的一般性方法并進行了較系統論述。但是該方法只適應于封閉塊體的搜索,運用在船舶有限元模型邊界確定上,具有一定局限性。
Y.Jun等[5]提出了內腔空間搜索算法,首先對空間區域進行劃分,通過八叉樹算法將空間中的實體部分確定出來并建立索引,然后采用三維空間掃描線算法對整個空間進行搜索,確定實體內腔空間范圍。該方法一般要求對內腔體邊界有更多的已知條件,且同樣要求識別的空間封閉,無法應用于船舶有限元模型的空間識別。
M.Ankerst等[6]研究了3D模型檢索技術,該技術基于3D模式識別和模型匹配以及基于內容的圖像檢索,直接對3D模型進行某種切分,然后統計每個切分單元中點的個數和所有點個數的比例,構成形狀直方圖,再用歐幾里德距離計算相似性。該方法只適應于3D模型的檢索和比較,無法應用于邊界的精確確定。
總的來說,雖然三維空間邊界的確定研究較多,但是不能直接應用于船舶有限元模型空間搜索,而涉及到船舶有限元模型的空間搜索研究較少。
單威俊等[7]根據散貨船舷側上任意一個起始有限元網格單元和艙室內部任意空問一點P(x,y,z),提出效率較高的算法對每個單元進行判斷,自動識別出艙室的所有邊界單元。但是這種方法要求有較高的輸入條件,且只能完整識別出部分油船和散貨船的艙室,在部分艙室搜索時,有多搜或者少搜單元的現象。
本文基于拓撲學有關原理,結合CAE模型和CAD模型優勢,將基于單元的CAE模型轉化成基于面的CAD模型來處理,提出了“切分拼接”的方法,該方法可以大幅提高艙室空間的搜索效率和搜索精度。
2.2 切分拼接方法
1)原理描述
上述幾種方法對船舶艙室空間識別均無大的借鑒意義。本文提出一種基于有限元網格模型的“切分拼接”方法實現艙室空間的識別。首先,把模型切分成一塊塊沒有被分割的面;然后通過兩面確定第3面的組合方法,將面拼接成空間。先利用模型中的自由邊對內部結構單元進行過濾,和自由邊關聯的單元必定是內部構件而非艙室空間的邊界單元,其中特殊結構上的開孔需特殊處理;然后根據構件之間的相交關系對模型進行切分 (見圖5),將圖中所示切分出的一系列單元組 (1~21)定義為“面”;最后依據三維立體幾何的性質將切分出來的面拼接成艙室空間。
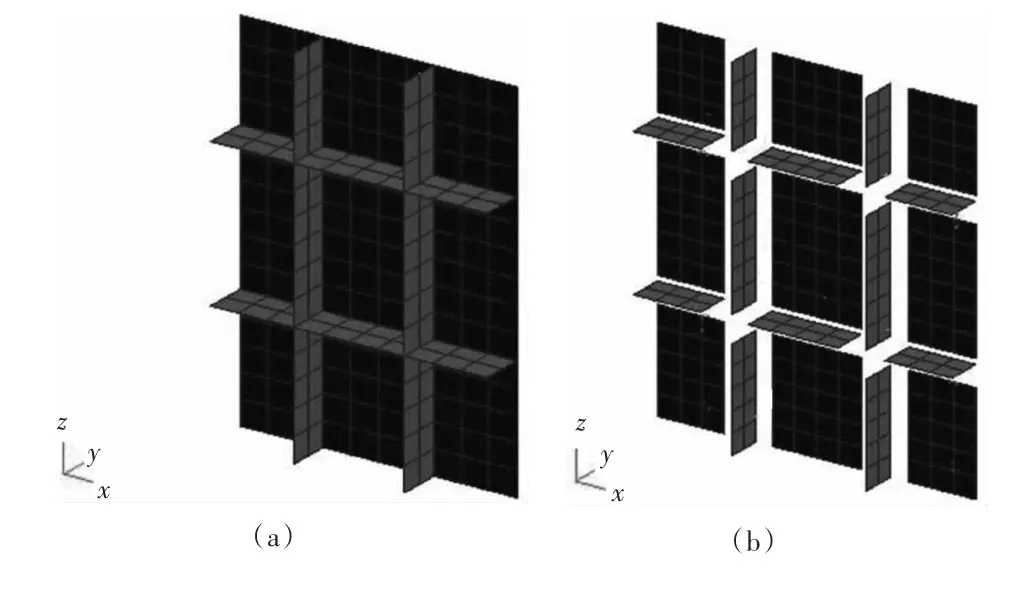
圖5 切分示意圖Fig.5 Illustration of segmentation
根據三維立體的幾何性質,任何2個相交 (有公共邊)的面可以確定第3個面,其中第3個面必須滿足如下特征:分別與這2個面相交且不交于同一交線,也即第3個面的2條邊分別和已定的2個面是公共邊 (見圖6)。面1和面2相交,面3分別與面1和面2相交且不交于同一交線,由此得出面3是屬于該三維艙室空間的邊界。圖6為實際模型中的3個相關面的拓撲關系。
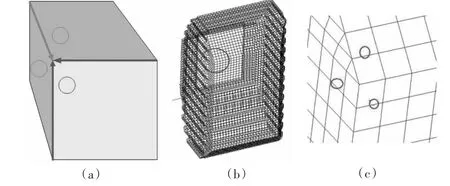
圖6 拼接示意圖Fig.6 Illustration ofmontage
2)實現過程
首先,將模型切分為若干塊沒有被分割的面,如圖7所示。切分面有以下幾種方法可選擇:不過濾自由邊 (不進行預處理)直接切分;過濾自由邊關聯的內部構件單元之后切分;按水密結構的相交關系切分;按自定義結構相交關系切分。
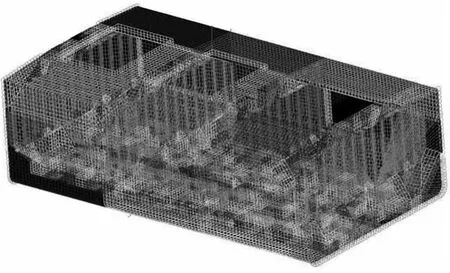
圖7 模型切分效果Fig.7 Illustration of segmentationmodel
其次,采用上述方法原理將切分出的面再拼接成艙室空間。其中對于槽型艙壁將Edges的2個端點近似看做1條邊。實現步驟如下:
步驟1:指定任一屬于艙室空間邊界的單元作為起始單元;
步驟2:根據起始單元的拓撲關系識別出艙室空間的第1塊“面”;
步驟3:由第1塊“面”的邊的拓撲關系,確定第2塊“面”;
步驟4:根據第2.2節1)中的描述判定出第3塊“面”;
步驟5:將第3塊“面”替代為第1塊“面”;
步驟6:迭代步驟3~步驟5,直至艙室空間拼接完成;
步驟7:定義識別出的空間所屬的艙室類型,如貨油艙、壓載艙等,用于后期創建腐蝕環境。
最后,對于沒有正確識別的艙室空間可采用手工調整方法補充完善。
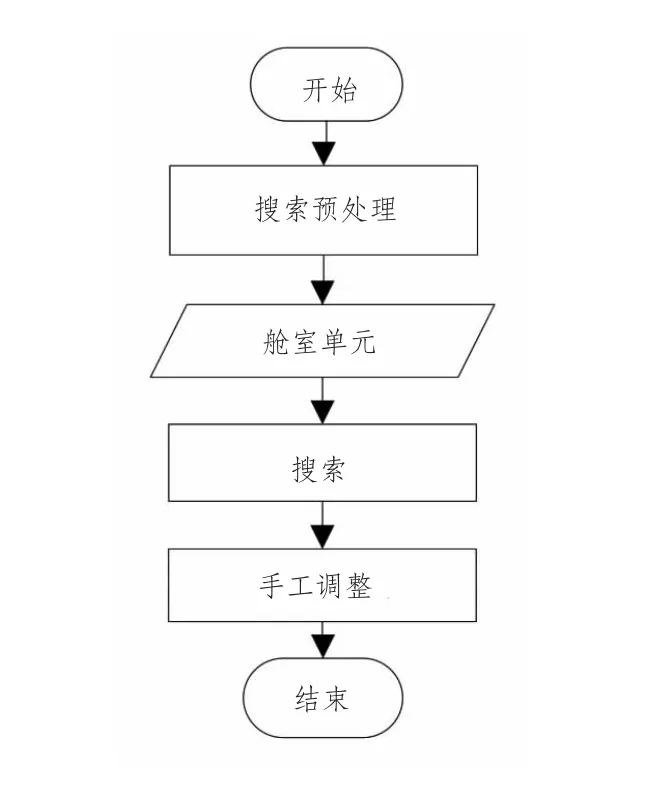
圖8 艙室空間搜索流程Fig.8 The flow of cabin space detect
2.3 流程及難點
1)預處理
艙室空間識別之前要進行預處理,過濾掉非邊界的內部結構單元,但如何獲取所有的內部構件單元不太容易。經對船舶有限元模型研究,除極少數特殊的水密艙壁上有開口外,艙室的邊界都應為水密結構,不含有自由邊。因此本文提出,首先獲取所有的自由邊,再根據自由邊相關聯的單元的拓撲結構得到的單元即為內部構件單元。對于結構的開孔,自由邊的節點是閉環,可以根據Edgs節點的拓撲關系判定,進而識別艙室時根據結構類型對開孔進行相應處理。
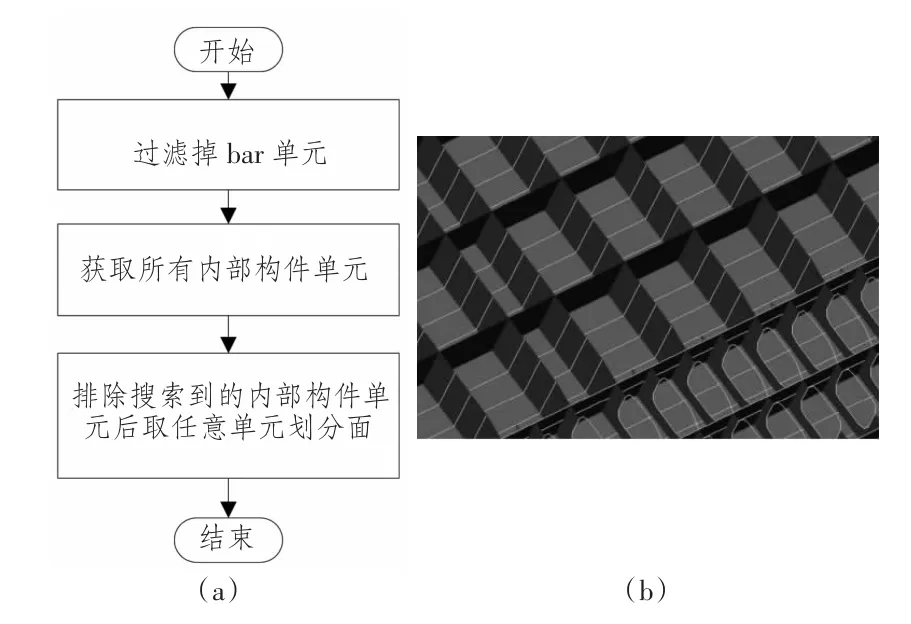
圖9 預處理流程及內部結構Fig.9 Preprocess flow and internal structure
2)拼接艙室
船舶結構有限元模型相對比較復雜,特別是在槽型艙壁與底邊艙斜板相連處、雙槽型艙壁相交處及槽型艙壁和頂凳相連處,會出現部分三角形單元,預處理切分時難免會出現形狀不規則的“面”,甚至1個面只包含1個單元。艙室空間拼接時可能出現符合拼接規則,但不是邊界單元的面。該情況可獲取結構識別部分設定的橫剖面參數,根據相應船型排除非艙室空間邊界的面。另外,用起始單元鎖定第1塊面之后,由第1塊面的邊拓撲關系可能會獲取多塊待判定的面,從待定的面中識別出正確的艙室空間的邊界是個難點。本文研究的方法為,分別在2個面內作垂直于公共邊的輔助向量并計算夾角,若夾角為0°~180°即可確定為第2塊邊界面。
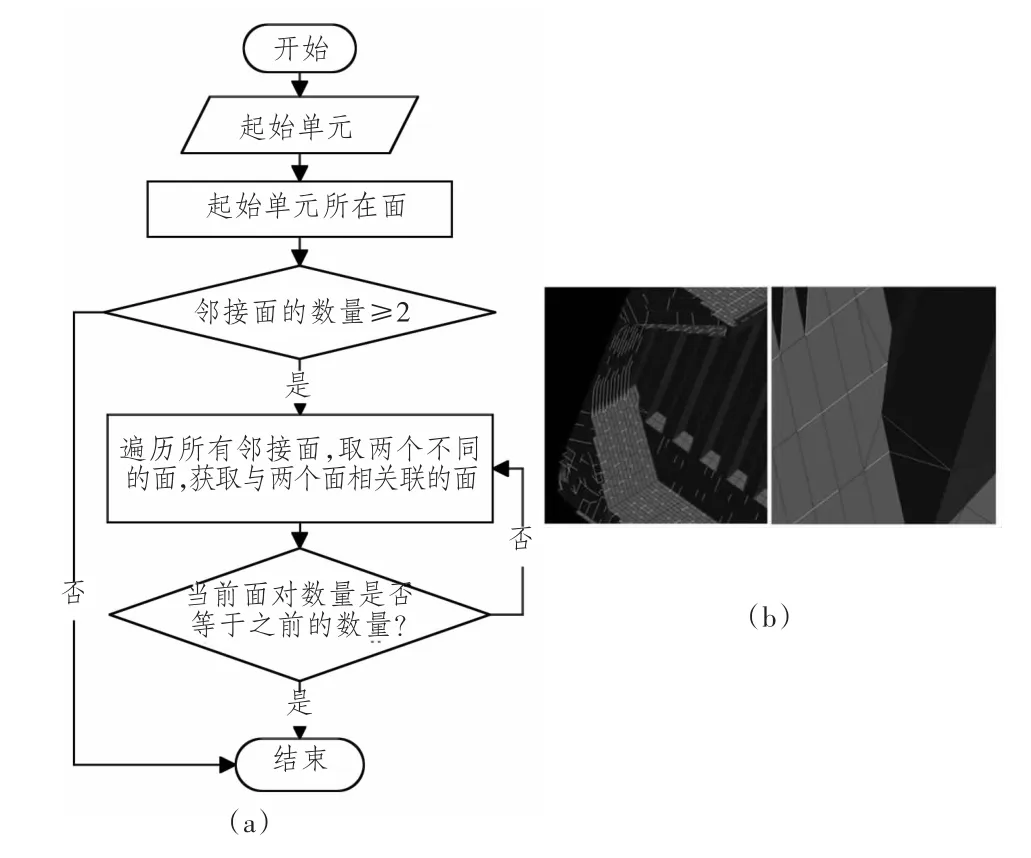
圖10 拼接流程及空間角隅Fig.10 Montage flow and space corner
3 應用實例
以MSC.Patran為處理平臺,使用PCL(Patran Command Language)作為開發語言,基于上述思想開發了船舶艙室空間識別程序對本文的方法進行驗證。經對某散貨船和油船實船的有限元模型進行測試,可以實現模型的合理切分并有效識別艙室空間。
另外,對于含有雙槽型艙壁的油船,利用本文方法也能實現貨油艙空間的識別。由于槽型艙壁結

圖11 散貨船艙室空間Fig.11 Cabin spaces of bulk carrier
構網格自身的復雜性,手工提取此種類型的艙室勢必需要花費大量的人力,上述方法為編程實現艙室空間的自動識別提供一種可行的技術方案,大大降低驗船師的工作量和縮短審圖周期。

圖12 雙槽型艙壁油船艙室空間Fig.12 Cabin spaces of double corrugated bulkheads tanker
4 結語
本文按照船舶規范校核中對艙室空間識別的需要,完成了基于有限元模型結構和艙室空間識別方法的探索研究。主要結論如下:
1)可根據船舶橫剖面和縱剖面配合船型,實現約60%的結構完全自動搜索;
2)提出了基于三維立體幾何性質的切分拼接方法可以實現艙室空間的自動識別,并編寫程序對該方法的有效性進行驗證;
3)為船舶與海洋結構空間的自動識別提供一種可行的技術方法,可大大降低船舶與海洋結構物設計工程師的工作量和縮短審圖周期。
[1]徐華.HCSR的隱形機會[J].中國船檢,2011(2):32-35.
XU Hua.Invisible opportunity of HCSR[J].China Ship Survey,2011(2):32 -35.
[2]IACS發布雙殼油船和散貨船協調共同結構規范(HCSR)[J].船舶標準化工程師,2012,45(5):16 -16.
IACS is publishing HCSR[J].Ship Standardization Engineer,2012,45(5):16 -16.
[3]殷毅.HCSR軟件彰顯硬實力[J].中國船檢,2012(9):29-31.
YIN Yi.The software of HCSR highlight the hard power[J].China Ship Survey,2012(9):29 -31.
[4]張奇華,鄔愛清.隨機結構面切割下的全空間塊體拓撲搜索一般方法[J].巖石力學與工程學報,2007,26(10):2043-2048.
ZHANG Qi-hua,WU Ai-qing.General methodology of spatial block topological identification with stochastic discontinuities cutting[J].Chinese Journal of Rock Mechanics and Engineering,2007,26(10):2043 -2048.
[5]JUN Y.A piecewise hole filling algorithm in reverse engineering[J].Computer - Aided Design,2005,37:263-270.
[6]ANKERST M,KASTENMULLER G,KRIEGEL H P.3D shape histograms for similarity search and classification in spatial databases[R].International Symposium on Spatial Databases,1999:5 -8.
[7]單威俊,李峰.船舶模型邊界網格單元識別技術研究[J].計算機工程與設計,2008,29(10):2652 -2654.
SHANWei-jun,LIFeng.Research on boundary elements of ship model identification techniques[J].Computer Engineering and Design,2008,29(10):2652 -2654.
Research on spaces detection methods of offshore structure and ship FEM model
SHANWei-jun,XU Fang,CHEN Kun-kun,ZHOUWei
(China Ship Scientific Research Center,Wuxi214082,China)
During structure strength assessment of offshore structures and ships,the cabin spaces need to be derived from the numerous elementmodels.It can be done bymanual extraction.But the problem is thatmanual extraction is quite tedious and time-consuming.This paper is written to study the detection methods for cabin spaces based on the finite elementmodels and themethod of splitting and jointing is put forward.Research shows it isworkable to follow the next steps to realize the automatic recognition of cabin spaces for programming:First,filter the internal structure by using the free edges in themodel;then separate the model according to intersection segmentation between structures;finally use mosaic segmentation selected by certain rules tomake cabin space.
offshore structure;ship;finite elementmodel;space detect
U663.2
A
1672-7649(2014)05-0025-06
10.3404/j.issn.1672-7649.2014.05.006
2013-10-24;
2014-01-28
上海市科學技術委員會資助項目([2012]12231203700)
單威俊(1982-),男,碩士,工程師,主要從事CAE二次開發技術方面的研究工作。
book=5,ebook=397
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
特別健康(2018年3期)2018-07-04 00:40:18
發明與創新(2016年26期)2016-08-22 03:23:28
電測與儀表(2016年6期)2016-04-11 12:06:38
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
計測技術(2014年6期)2014-03-11 16:22:12
上海金屬(2013年4期)2013-12-20 07:57:18
