角位移增大連桿軸向預壓縮驅動器靜、動態特性仿真分析
2014-03-01 06:55:52胡凱明文立華燕照琦
兵工學報 2014年8期
胡凱明,文立華,燕照琦,2
(1.西北工業大學 航天學院,陜西 西安710072;2.中國航空工業集團公司 中國航空綜合技術研究所,北京100028)
0 引言
壓電雙晶片驅動器具有帶寬高、相對功率消耗較小等優點,在1998年NASA 蘭利中心的Wlezien等就提出壓電材料將是變形體飛行器驅動器的最佳選擇,但前提是必須克服壓電元件變形量小的缺陷[1]。針對這一問題,國內外學者進行了大量的研究,從而產生了各種方法,如機械累積法[2]、柔性鉸鏈法[3]、預壓縮法[4]等。機械累積法通常需要其他機電設備才能實現;柔性鉸鏈制造復雜,并且它是通過犧牲輸出力的方法來增大輸出位移;預壓縮法增大輸出位移的方法可以在不減小輸出力的同時增大輸出位移,增大機械轉化效率,該方法于1997年由Lesieutre 等[4]提出,他們發現壓電雙晶片在施加軸向力后,減小了橫向剛度,增大了驅動器的機電耦合系數,理論上當軸向力達到屈曲臨界載荷時,機電耦合系數可以達到1,推翻了此前一般認為的組件耦合系數應當小于其中任何一個零件耦合系數的傳統思想,較傳統壓電驅動器大大增大了設計空間。基于該發現此后Schwartz 等于2002年研制了單晶片Rainbow、Thunder 大變形驅動器[5],這兩種驅動器是利用多層材料的熱膨脹系數差來產生預應力,但是由于這兩種驅動器都是非對稱結構,因此存在不能產生對稱驅動位移的弊端。
在2005年Barrett 領導的團隊將軸向預壓縮(PBP)壓電雙晶片應用于小型旋翼飛行器XQ-138的柵格翼驅動[6],之后該團隊將此技術應用于固定翼變形小型無人機[7]、小型導彈[8]、制導子彈[9]。他們的工作表明該預壓縮的壓電雙晶片較無預壓縮時的驅動位移和力矩同時增大4 倍以上;較傳統電機驅動功率消耗大幅降低,并且極大地提高了控制帶寬,這一點對于短周期小的微小型飛行器尤為重要;另外驅動零部件數量大為減少,因而增大微小型飛行器有效載荷。此后2007年Giannopoulos 等為了進一步使壓電雙晶片產生大的輸出位移,通過施加超過一階臨界屈曲載荷的方法,設計了一種雙穩態突變的壓電雙晶片,位移和輸出力矩有所增大,但這種雙穩態突變屈曲變形目前還沒有辦法控制[10-11]。
然而Barrett 等提出的PBP 驅動器端部轉角最大只能達到±6°,在很多實際應用中,其驅動位移仍是不夠大的,因此本文基于PBP 驅動器利用變形幾何關系設計了一組進一步增大輸出角位移的連桿機構,建立了靜、動態力學的數值模型和有限元模型,得到了該機構的靜、動態特性,為設計壓電雙晶片大位移驅動器及實驗驗證提供理論參考依據。
1 角位移增大連桿PBP 驅動器方案
PBP 壓電雙晶片驅動器的原理可參考文獻[6 -9,12],在此不再贅述。本文利用三角幾何關系放大偏轉角度,通過在原PBP 驅動器旁邊增加一組連桿來實現角位移放大。PBP 驅動器的一端和滑動軸固聯,另一端和轉動軸1 固聯,將拉緊皮帶環套于滑動軸和轉動軸之間,從而對壓電雙晶片產生軸向壓縮力,滑動軸只能沿軸向滑動;輸出角位移放大連桿由一根短桿和一根長桿組成,長桿的一端固聯滑動軸,另一端通過一對銷子和短桿的一對滑槽相連,二者之間可以相對滾動及滑動,短桿的另一端固聯轉動軸2,轉動軸2 和轉動軸1 分別由兩對軸承支撐,相互獨立,轉動軸2 為驅動器輸出軸。如圖1所示。
角位移增大連桿PBP 驅動器的運動形式如圖2所示。
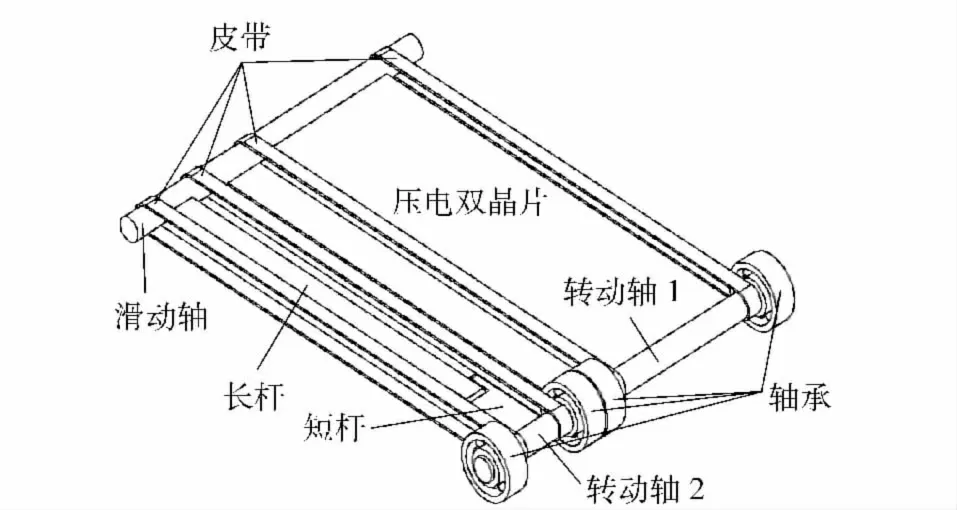
圖1 PBP 輸出角位移增大連桿驅動器設計方案Fig.1 Scheme of actuator with connecting rod for magnifying PBP output angular displacement
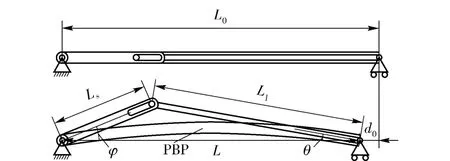
圖2 PBP 輸出角位移增大連桿驅動器幾何參數Fig.2 Geometrical parameter of actuator for magnifying PBP output angular displacement
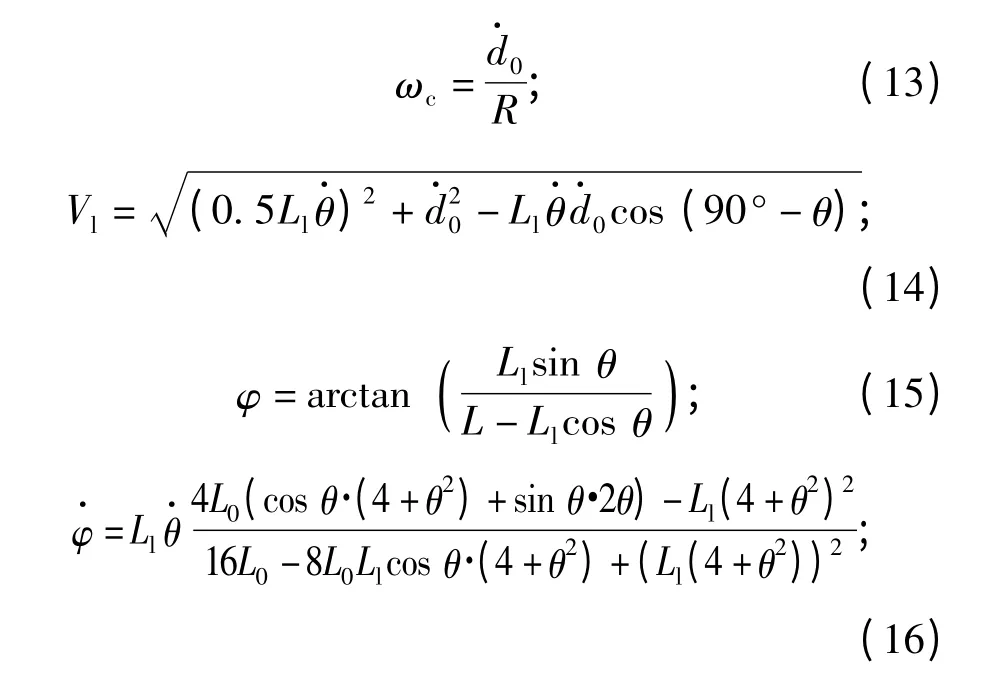
圖2中L0為壓電雙晶片彎曲前長度,d0為彎曲引起的軸向縮短量,L 為壓電雙晶片彎曲后兩端的長度,如圖所示L0=d0+L,Ll、Ls為長桿和短桿的長度,φ 為輸出轉角,θ 為壓電雙晶片端部轉角,于是可以得到各量之間的關系:

為了將輸出端轉角φ 放大,需要合理地設計兩連桿的長度Ls和Ll.由圖2可以看到,為了滿足L0、d0、Ll、Ls的長度要求,長桿和短桿連接處設計為一對銷子在滑槽內滑動的運動副,若假設長桿的長度Ll一定,則短桿的參加運動部分的長度Ls應該是可變的,于是(1)式中便有φ、L、Ls3 個未知數,從而無法得到確定解,下面建立θ 和L 的關系,在此首先假設壓電梁變形的形狀函數為

再假設壓電雙晶片彎曲后弧長和原長保持一致,由于轉角較小,可得到總長度恒定的(3)式:
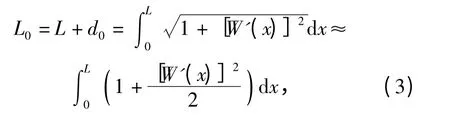
式中:C 為形狀函數的幅值;根據(1)式和(3)式并結合θ=Cπ/L,可得到以下各變量和端部轉角θ 的幾何關系:
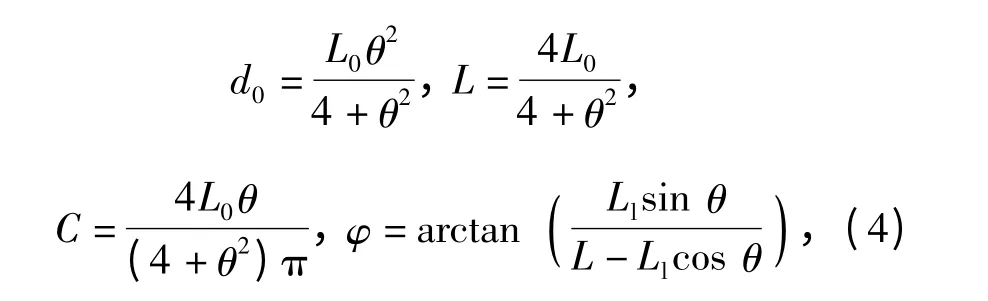
式中:L0長度取6 cm;Ll長度取5 cm;假設壓電雙晶片端部轉角θ 的最大偏轉為6°.當θ 從0°變化到6°時,短桿Ls的變化范圍為1 ~1.14 cm.根據下文的動力學分析部分可以發現,當PBP 驅動器達到理論上最大位移6°后,它還將朝該方向繼續運動,因此短桿Ls應長于1.14 cm,初步取為1.2 cm.輸出端轉角φ 隨著θ 角的增加近似線性地增大到27°,滑動端位移d0最大為0.17 mm.各位移量之間的幾何關系如圖3所示。
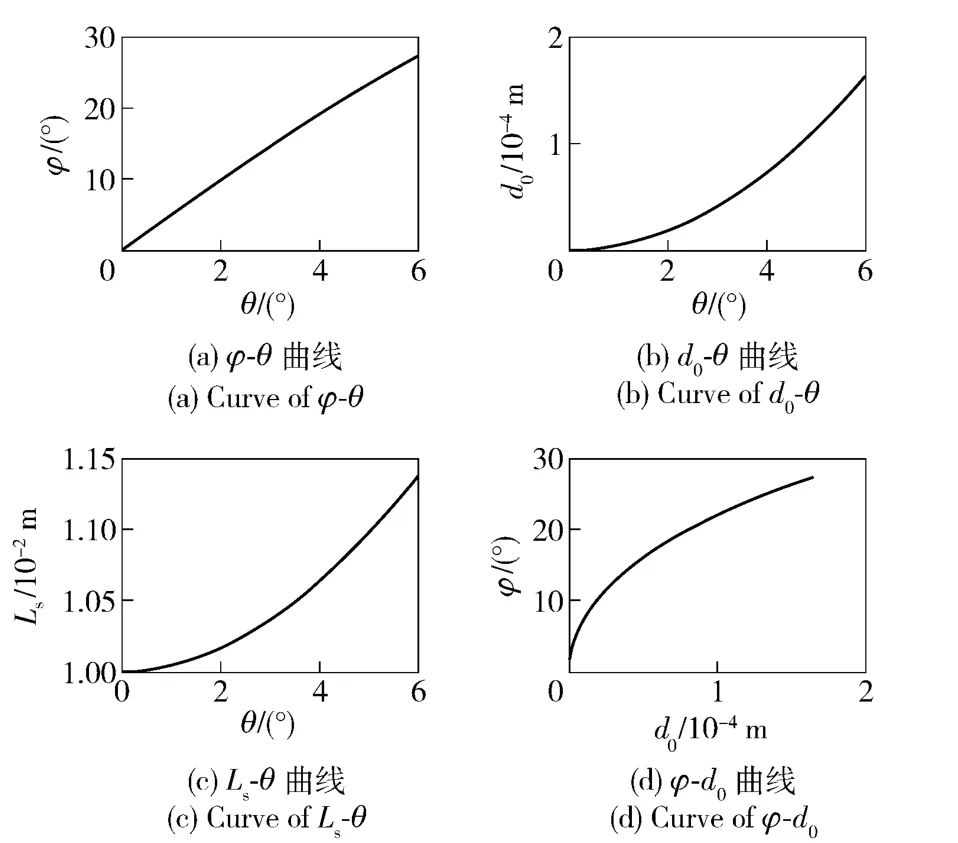
圖3 加入連桿后的各位移量之間的幾何關系Fig.3 Geometrical relationship among displacements
2 角位移增大連桿PBP 驅動器靜力學模型
2.1 靜力學最小勢能原理模型
角位移增大連桿PBP 驅動器受力情況如圖4所示。
圖中F 為軸向力,F =Fc×0.8 =EIπ2/L2×0.8 =50 N,其中:EI 為壓電雙晶片的橫向彎曲剛度;Fc為壓電雙晶片的臨界屈曲力;Kt為扭簧剛度。在此僅考慮壓電效應在垂直于Oxz 平面的方向上產生的彎曲力矩
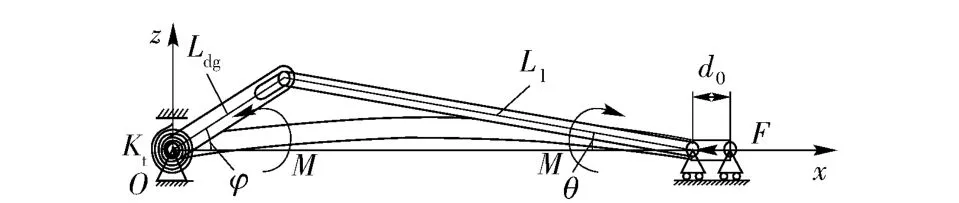
圖4 加入增大角位移連桿后的靜力學模型Fig.4 Statics model of connecting rod scheme
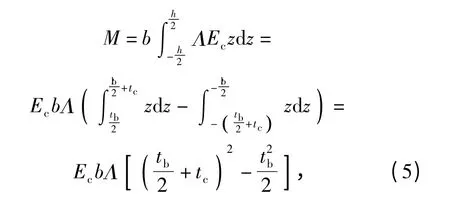
式中:b 為壓電雙晶片寬度,b=20 mm;tc為壓電層厚度,tc=0.2 mm;tb為中間層鋼片厚度,tb=0.2 mm;總厚度為0.6 mm;Ec是壓電層的軸向彈性系數;Λ 是由z 方向的電場強度E3=120 V 在x 方向上產生的應變,Λ =d31×E3,d31為壓電應變常數。得到M=0.018 9 N·m,由于壓電雙晶片的驅動力矩為常值分布力矩,因此根據材料力學知識可以用一個兩端受到一對方向相反的力矩M 的簡支梁來模擬其受力情況。
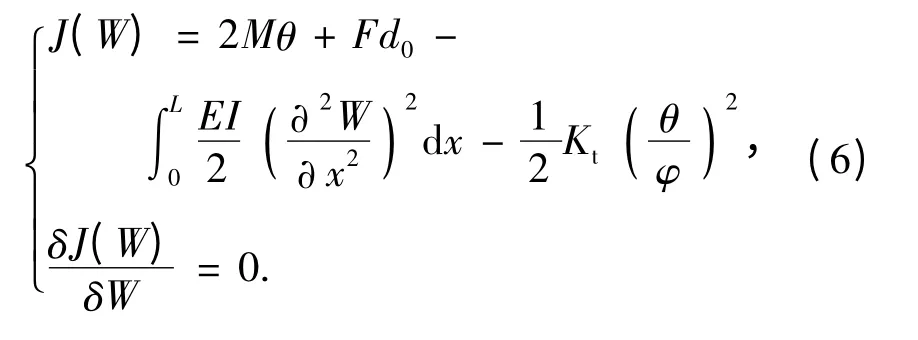
根據以上分析,則可以得到原PBP 驅動器和角位移增大連桿PBP 驅動器的最小勢能原理表達式:
2.2 靜力學結果及分析
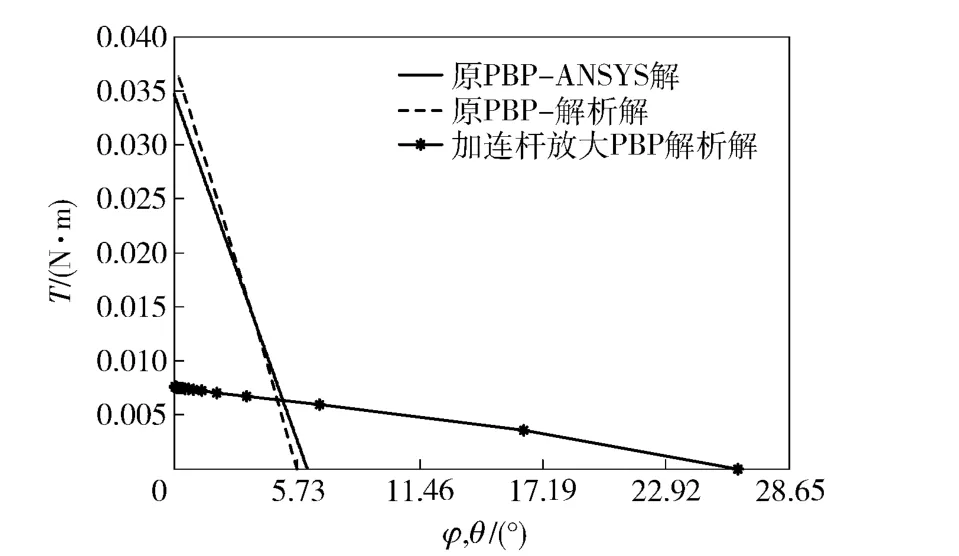
圖5 輸出轉角φ 或θ 和輸出力矩T 的關系Fig.5 Output angle vs.output torque
圖5得到了原PBP 驅動器和加角位移放大連桿后的PBP 驅動器輸出力矩T =Kt×(φ 或θ)和輸出轉角(φ 或θ)的關系。由圖5可知,對于原PBP驅動器,最小勢能原理計算結果和商用有限元軟件ANSYS計算結果符合較好,由此可以保證用最小勢能原理計算加位移放大連桿后的PBP 的正確性。由圖5可知,加角位移放大連桿后的PBP 的最大自由輸出轉角φf較原PBP 的θf增大4 倍以上,而輸出力矩Tb隨之減小,表明該機構可用于要求輸出轉角較大而輸出力矩不大的情況。
3 角位移增大連桿PBP 驅動器動力學模型
端部帶有舵面(可等效為一轉動慣量負載)的角位移增大連桿PBP 驅動器剛柔耦合動力學模型如圖6所示。
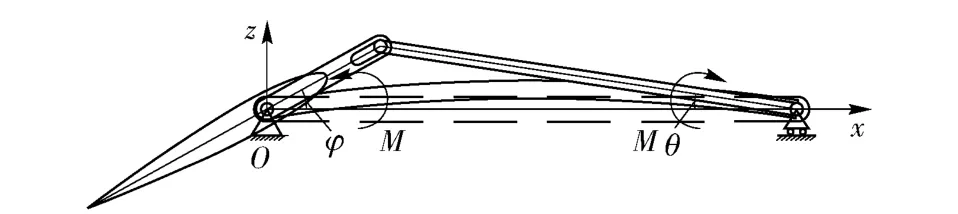
圖6 加入連桿放大機構的PBP 剛柔耦合動力學模型Fig.6 Dynamics model of connecting rod scheme
下面對其中的各個運動部件逐一進行動能分析。
3.1 壓電雙晶片梁的動能
考慮壓電梁為柔性體,其相對于初始位形有橫向和軸向的位移W(x,t)和V(x,t),取梁微元段如圖7所示。
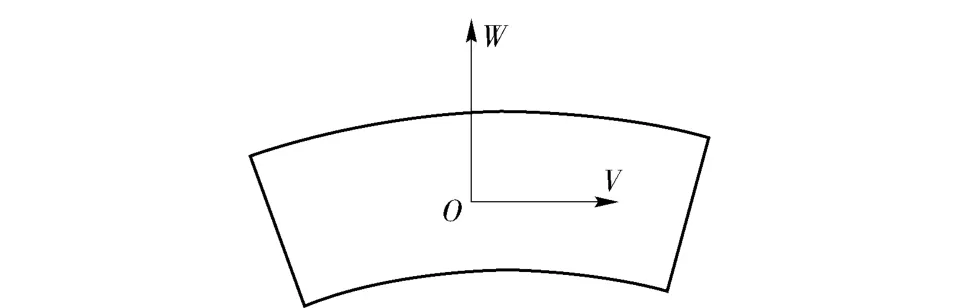
圖7 壓電雙晶片梁微元段橫向縱向位移Fig.7 Transversal and longitudinal displacements of bimorph beam differential section
橫向位移形狀函數為(1)式。
假設端部位移d0沿軸向分布為線性分布,因此假設軸向位移形狀函數為

將W 和V 對時間求導,得到
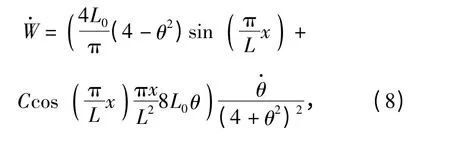

將微段梁動能在整個梁上積分,則可得到壓電雙晶片動能
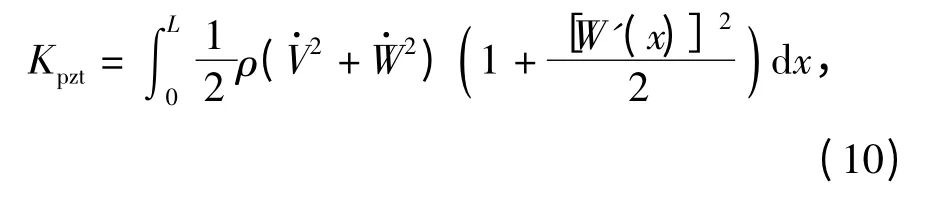
式中:下標pzt 代表壓電雙晶片;ρ 為單位長度壓電雙晶片的質量。
3.2 連桿的動能
假設連桿為剛體,不考慮連桿的變形能,則可以通過對連桿運動分析得到長桿和短桿的動能,如圖8所示。
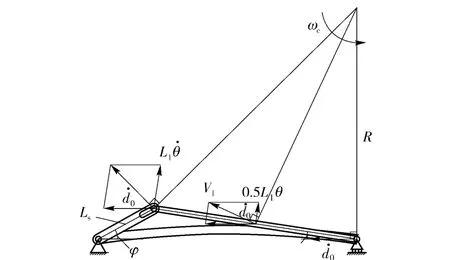
圖8 連桿運動分析圖Fig.8 Kinematical analysis diagram of connecting rod
由圖8可得長桿和短桿的動能
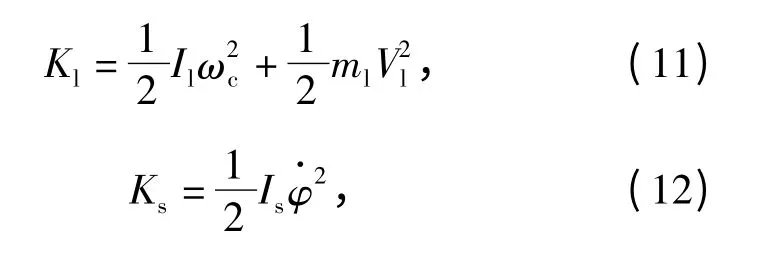
式中:
Il和Is為長桿和短桿的轉動慣量(假設連桿是理想的長方形截面桿),

長桿的轉動半徑R 如圖9所示,根據三角形相似定理,可得
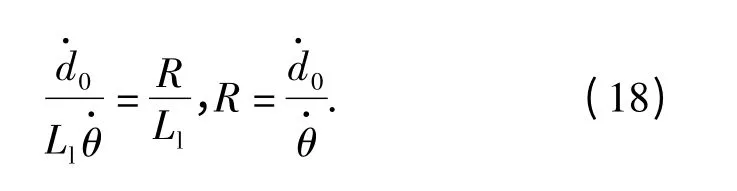
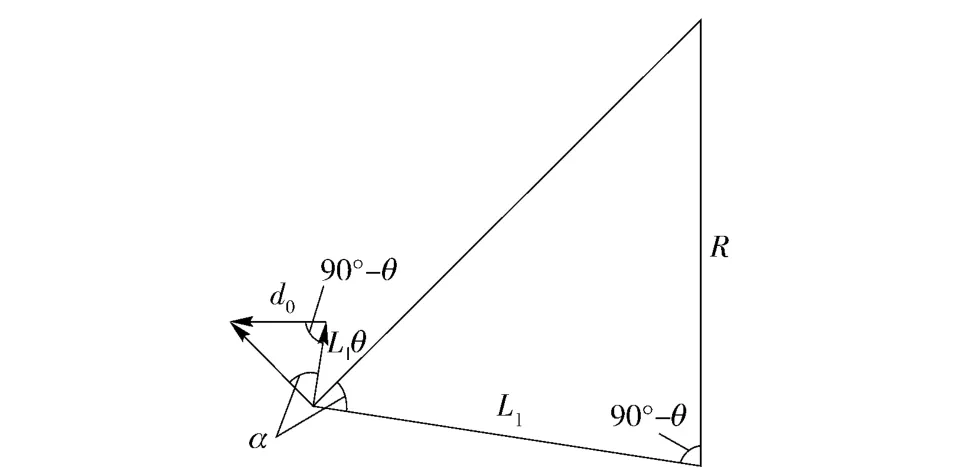
圖9 速度三角形相似于幾何尺寸三角形Fig.9 Velocity triangle similar to triangle geometry
3.3 舵面轉動動能
舵面轉動動能

3.4 橡膠帶勢能的變化
橡膠帶在機構運動過程中彈性勢能的變化為

式中:L0s為橡皮帶原長,L0s=0.05 m;Fmax為最大軸向力,Fmax=52 N.
3.5 建立系統拉格朗日方程
不考慮摩擦力等非保守力做功,總動能、總勢能及總動勢表達式:
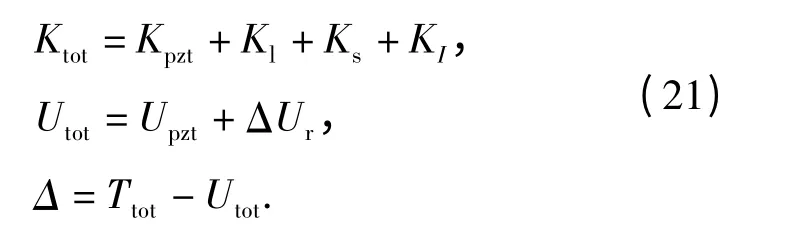
選取θ 為廣義坐標,于是可得

式中:廣義力Q 為驅動力矩M.將(21)式中的各項都轉化為θ、的表達式,并代入(22)式,并整理簡化成如下形式:

(23)式為高度非線性一元二階微分方程,因此沒有解析解,只能得到數值解。
最后利用保守系統在整個運動過程中總能量守恒的原理,來驗證(7)式~(23)式以及Matlab 程序的正確性:

4 驅動器有限元模型
為了驗證以上數值模型的正確性,利用商用有限元軟件ANSYS 進行驗證計算,壓電材料采用壓電耦合場單元Solid226,其余結構單元采用Solid186,橡膠彈性帶用Combine14 彈簧單元來模擬。為將連桿近似模擬成剛體,把連桿的剛度取得非常大(比壓電材料的剛度大100 倍以上)。舵面用一個集中質量塊模擬其轉動慣量。載荷和邊界條件與以上數值模型取得一樣。對其進行了瞬態大變形動力學分析,有限元模型如圖10所示,當變形到0.022 s 時刻的計算位移結果如圖11所示。

圖10 驅動器有限元模型Fig.10 Finite element model of actuator
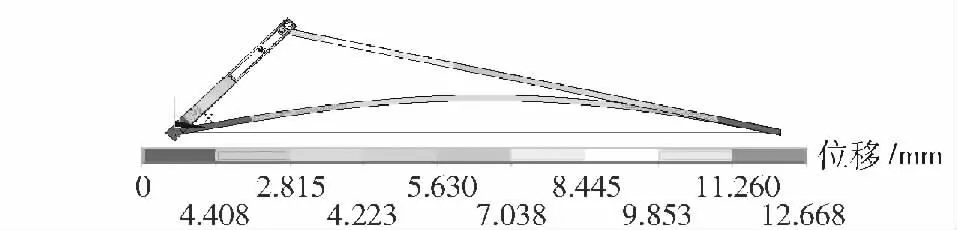
圖11 驅動器有限元0.022 s 位移結果Fig.11 0.022 s displacement of actuator
5 動力學結果驗證及分析
壓電雙晶片尺寸為60 mm×20 mm×0.6 mm,假設壓電材料和中間層材料都為各向同性材料。壓電層彈性模量為Ec=61 GPa,密度為7 600 kg/m3,中間層彈性模量為Em=110 GPa,密度為8 300 kg/m3,各層厚度都為0.2 mm,層之間理想貼合不考慮膠層的厚度,壓電雙晶片質量為5.64 g.假設其余運動部件的材料密度與鋁一致,長桿長5 cm、質量為0.33 g,短桿長1.2 cm、質量為0.163 g.轉動端部為9 cm× 3.25 cm 的舵面,其轉動慣量為1.18×10-6kg·m2.假設從0 s 開始施加一常值為120 V 的階躍電壓,產生0.037 8 N·m 的驅動力矩。計算時長取0.03 s.解析方法和有限元方法的瞬態動力學結果如圖12~圖19所示。
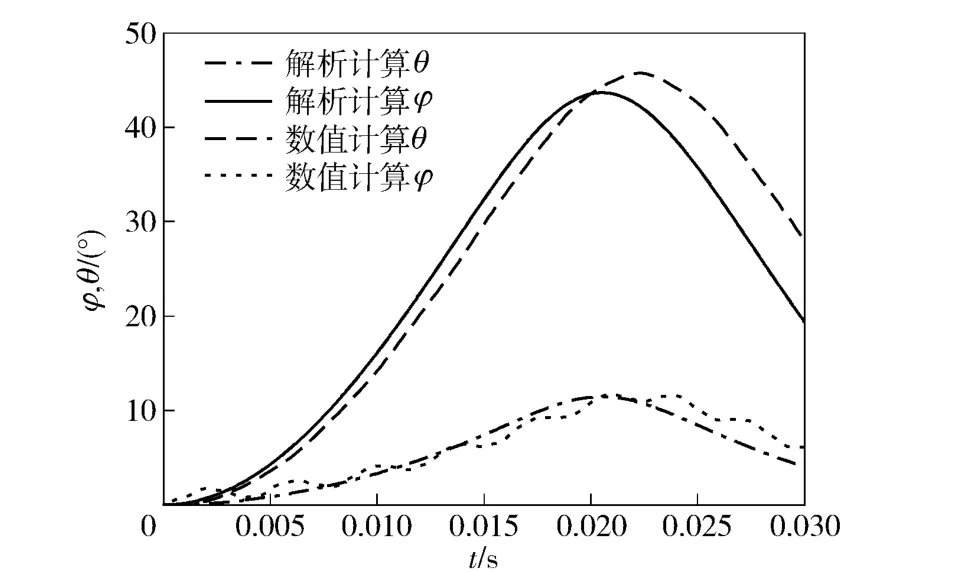
圖12 輸出角和壓電雙晶片端部轉角Fig.12 Curves of output angle and bimorph end angle
由圖12可以看出,本文提出連桿機構可使PBP驅動器輸出角增大4 倍以上。
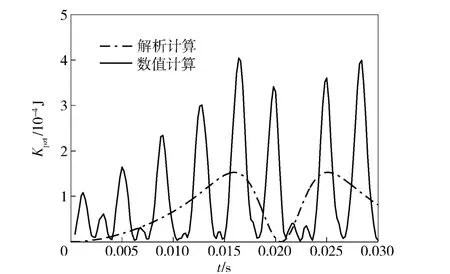
圖13 壓電雙晶片動能Fig.13 Kinetic energy curves of bimorph
由圖13~圖16可知,能量傳遞過程是由壓電驅動力矩所做功引起橡膠帶的彈性勢能變化,然后二者一起轉化成壓電雙晶片的變形能和動能,以及其他運動部件的動能。其中絕大部分轉化為了壓電雙晶片變形能,動能只占一小部分。橡膠帶彈性勢能的變化為壓電驅動力矩做功的4 倍左右,舵面的轉動動能比橡膠帶彈性勢能的變化小一個數量級,壓電雙晶片、長桿、短桿的動能較舵面轉動能再小一個數量級。當運動達到0.022 s 左右時,各動能都趨于0,表明速度趨于0,可見此刻系統達到極限位置,壓電力矩做功和橡膠帶彈性勢能的變化全部轉化為壓電雙晶片變形能。
由圖17可知,在以本文舵面作為驅動對象時,輸出轉角角速度在最大時能達到3 355°/s,平均速度達到2 000°/s,此速度相對于一般的飛行器伺服舵機300 °/s 的要求[13]有較大優勢,這里是指二者都不計空氣動力的情況。
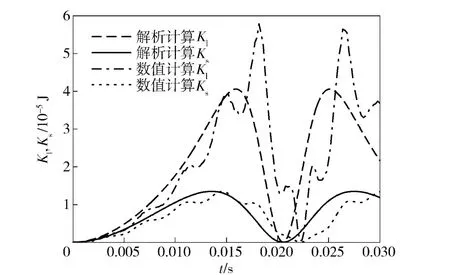
圖14 長桿和短桿的動能Fig.14 Kinetic energy curves of long and short rods
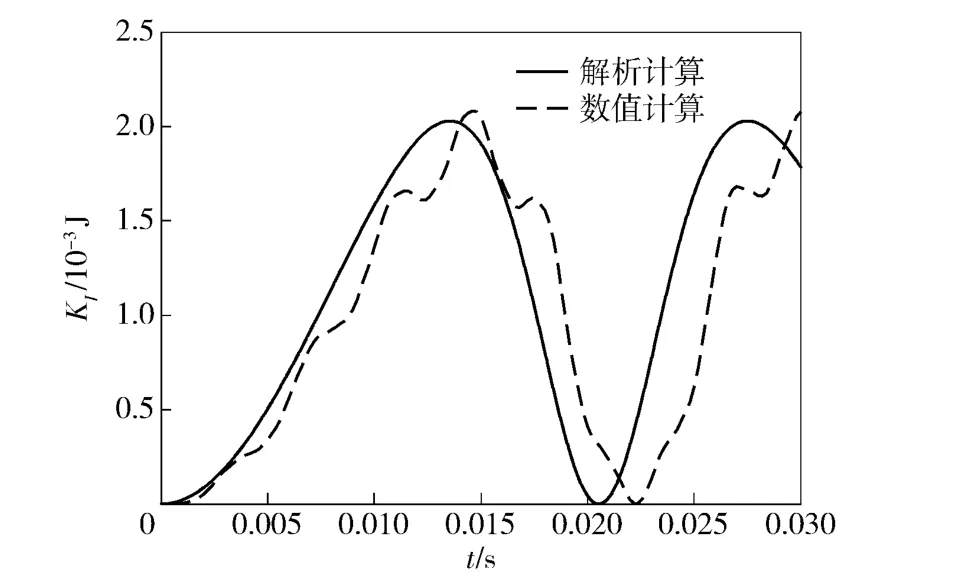
圖15 舵面慣性質量的轉動動能Fig.15 Rotational kinetic energy of wing inertial mass

圖16 壓電雙晶片應變能、壓電力矩做功、橡膠帶勢能的變化及總動能Fig.16 Strain energy of bimorph,work of piezoelectric moment,elastic potential energy of rubber belt and total kinetic energy
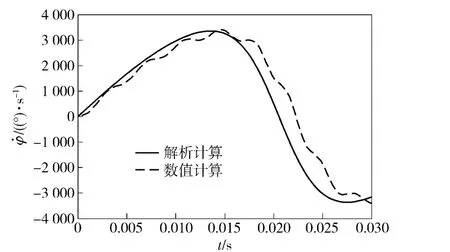
圖17 輸出角角速度Fig.17 Angular velocity of output angle
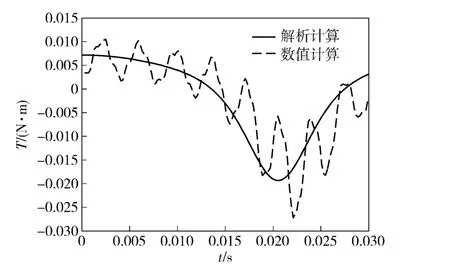
圖18 輸出力矩Fig.18 Output torque
將圖12、圖17、圖18結合觀察,可以看到輸出力矩從7.8 N·mm 開始單調下降,而角速度一直增大,直至3 350°/s,此時輸出力矩降為0,接著力矩負向增大,當時間為0.022 s 時,角速度下降至0,角度達到最大45°,負向力矩達到最大,之后力矩開始正向增大,但因其值為負,因此角速度仍反向增大,角度減小。由此可見,在階躍電壓的驅動下,驅動機構系統類似于一彈簧質量系統,可以預見,如果沒有阻尼,系統則會一直振蕩下去,然而實際系統一定有阻尼,再加以控制,驅動器系統最終將會停止平衡位置處,到達平衡位置的時間為13.6 ms,此時各運動部件的動能都達到最大,壓電雙晶片端部轉角θ 為6.1°,輸出轉角φ 為26.7 °.
圖19給出了輸出功率隨時間變化曲線,此處的輸出功率是由輸出角速度和輸出力矩直接相乘得到,因此功率的正負特性也是由輸出角速度和輸出力矩的符號所決定,并沒有實際的意義。平衡位置后的動力學特性從可控性角度來講是不希望出現的,是應該通過加入控制予以消除的,因此主要關心平衡位置前的動力學特性。由圖19可知,在到達平衡位置13.6 ms 前的8.05 ms 時,輸出功率峰值達到了0.23 W.
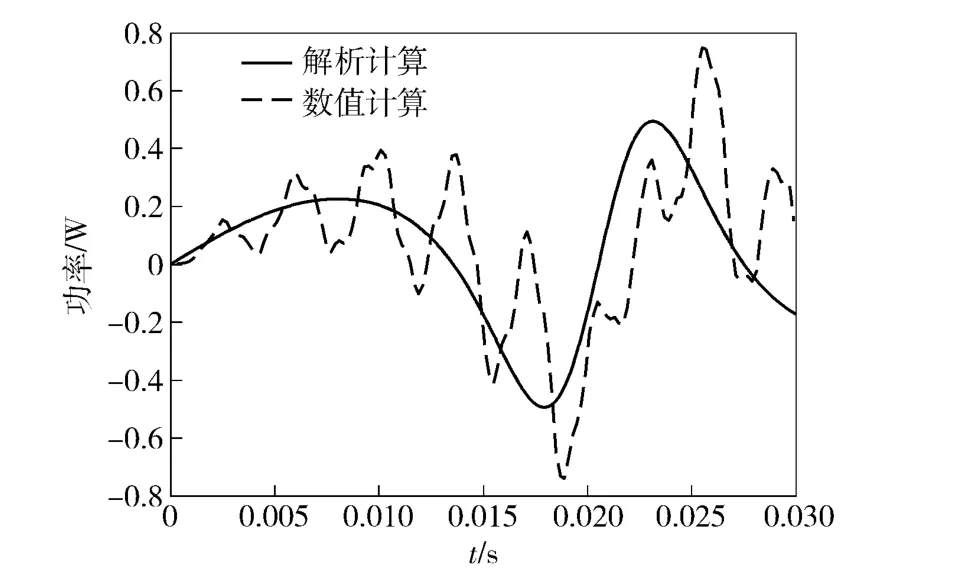
圖19 輸出功率Fig.19 Output power
從圖20可以看到總能量誤差保持在10-17的量級,而系統中能量最小的部件量級也在10-5,因而認為此量級為系統的仿真誤差,驗證了總能量守恒(24)式,因此證明了數值模型計算的正確性。
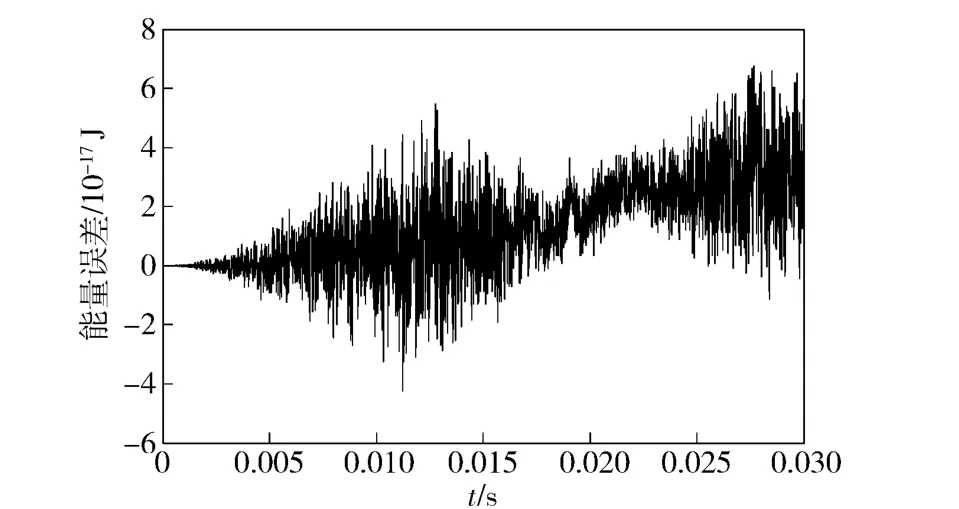
圖20 總能量誤差Fig.20 Error of total energy
由以上結果圖12~圖19可以發現,有限元的瞬態動力學分析結果有明顯的高頻振蕩特性,特別是反映壓電雙晶片動能的圖13,圖中振蕩周期大約為3.2 ms,頻率約為310 Hz.圖21為有限元模態分析計算得到的驅動器前2 階特征頻率,其中第2 階特征頻率為332 Hz 與階躍激勵下瞬態響應的高頻振蕩頻率接近,又恰好為壓電雙晶片橫向振動頻率,因此認為瞬態響應的振蕩主要是由驅動器的第2 階特征頻率引起的。這是由驅動器的固有特性(如壓電雙晶片的橫向彎曲剛度、材料密度以及和連桿的連接方式)所決定的,因此無法通過改變結構的固有特性來將其去除,只能進一步通過控制系統的加入來將其影響濾除。另外驅動器的第1 階特征頻率為30 Hz,表明該驅動器的控制帶寬可達到30 Hz,明顯優于普通伺服舵機控制帶寬,因此非常適合微小型飛行器的伺服控制。
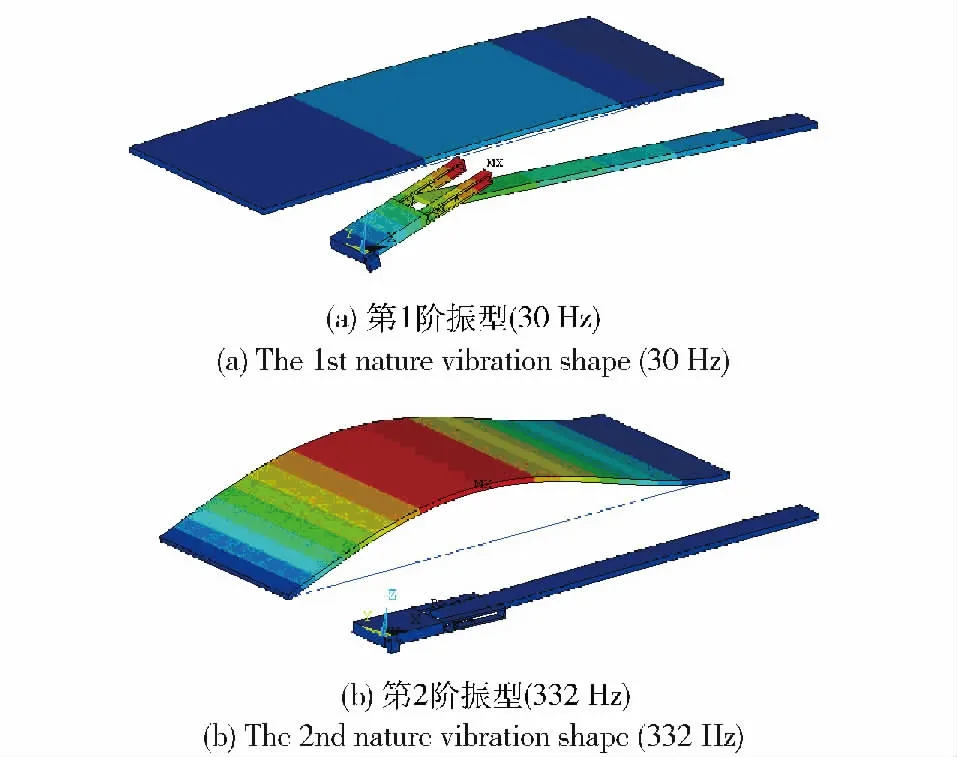
圖21 驅動器的第1、2 階模態振型Fig.21 The first and second nature vibration modes of actuator
除第2 階頻率產生的高頻振蕩影響外,圖12~圖19中的有限元結果較數值模型結果相對滯后一些,這主要是由于數值模型的彎曲模態假設的差別造成的。另外由于有限元中的連桿并非是絕對剛體,因此也會帶來一定的滯后。
總體來說,有限元模型和數值模型在趨勢和數量級上符合較好。因此認為數值模型的建立基本能夠反映驅動器的動力學特性,此外由于有限元計算該模型時間長,計算量大(其中有非線性接觸問題),因此不利于驅動器結構的優化設計,然而數值模型具有計算速度快,與驅動器動力學特性符合較好的特點,因此可以彌補有限元在優化設計方面計算速度較慢的不足。
6 結論
本文基于PBP 原理驅動器提出了一種進一步增大角位移的連桿機構PBP 驅動器。該驅動器增大了輸出轉角,是原PBP 驅動器的4 倍以上,可達到近30°,但同時輸出力矩隨之減小。瞬態動力學分析結果表明,在以文中舵面作為驅動對象時,無空氣阻力情況下,輸出轉角平均角速度可達2 000°/s,模態分析結果表明控制帶寬可達到30 Hz,明顯優于普通伺服舵機。本文提出的連桿增大角位移PBP驅動器適用于要求大位移,小輸出力矩,高控制帶寬的微小型飛行器舵機。因此本文的研究結果可以為微小型飛行器舵機驅動器設計和研制提供參考。
References)
[1] Wlezien R W,Horner G C,McGowan A R,et al.The aircraft morphing program[C]∥The 39th Structures,Structural Dynamics,and Materials Conference and Exhibit.Long Beach,CA:AIAA,1998:1927.
[2] Loverich J J.Development of a new high specific power piezoelectric actuator[D].Pennsylvania,US:the Pennsylvania State University,2004.
[3] 于志遠,姚曉先,戴閏志,等.壓電舵機微位移放大機構設計[J].兵工學報,2009,30(12):1653 -1657.YU Zhi-yuan,YAO Xiao-xian,DAI Run-zhi,et al.Design of micro-displacement amplifier of piezoelectric servo[J].Acta Armamentarii,2009,30(12):1653 -1657.(in Chinese)
[4] Lesieutre G,Davis C.Can a coupling coefficient of a piezoelectric device be higher than those of its active material?[J].Journal of Intelligent Material Systems and Structures,1997,8(10):859-867.
[5] Schwartz R W,Narayanan M.Electroactive apparatus and methods:US,US6847155B2[P].2002-06-07.
[6] Barrett R,McMurtry R,Vos R,et al.Post-buckled precompressed (PBP)elements:a new class of light control actuators enhancing high speed autonomous VTOL MAVS[C]∥The 12th Annual Proceedings of SPIE International Symposium on Smart Structures and Materials.San Diego,CA:SPIE,2005:111-122.
[7] Barrett R.Convertible vertical take-off and landing miniature aerial vehicle:US,6502787[P].2002-02-22.
[8] Vos R,DeBreuker R,Barrett R,et al.Morphing wing flight control via post-buckled precompressed piezoelectric actuators[J].Journal of Aircraft,2007,44(4):1060 -1068.
[9] Vos R,Barrett R.Post-buckled pre-compressed techniques in adaptive aero-structure:an overview[J].Journal of Mechanical Design,2010,132:031004-1-031004-11.
[10] Giannopoulos G,Monreal J,Vantomme J.Snap-through buckling behavior of piezoelectric bimorph beams:I.analytical and numerical modeling[J].Smart Materials and Structures,2007,16(4):1148 -1157.
[11] Giannopoulos G,Monreal J,Vantomme J.Snap-through buckling behavior of piezoelectric bimorph beams:II.experimental verification[J].Smart Materials and Structures,2007,16(4):1158 -1163.
[12] 胡凱明,文立華.軸向預壓縮壓電雙晶片驅動器動靜態仿真特性仿真[J].計算機仿真,2013,30(1):115 -119.HU Kai-ming,WEN Li-hua.Static and dynamic simulation and analysis for character of axial pre-compressed piezoelectric bimorph[J].Computer Simulation,2013,30(1):115 -119.(in Chinese)
[13] 劉興堂.導彈制導控制系統分析、設計與仿真[M].西安:西北工業大學出版社,2006.LIU Xing-tang.Analysis design and simulation of missile’s guidance control system[M].Xi’an:Xi’an Northwestern Polytechnic University Press,2006.(in Chinese)
猜你喜歡
電子器件(2021年4期)2021-10-26 12:27:18
上海節能(2020年3期)2020-04-13 13:16:16
裝備制造技術(2019年12期)2019-12-25 03:06:00
天津醫科大學學報(2019年6期)2019-08-13 07:04:32
測控技術(2018年8期)2018-11-25 07:42:16
電子工業專用設備(2016年8期)2016-08-24 09:39:59
電子世界(2016年22期)2016-03-12 22:15:32
超硬材料工程(2016年1期)2016-02-28 22:20:04
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發與創新(2014年4期)2014-03-11 16:42:24