UUV自航發(fā)射魚雷過程仿真
2014-02-28 01:32:26孫玉松李宗吉練永慶
水下無人系統(tǒng)學報 2014年5期
孫玉松, 李宗吉, 練永慶
?
UUV自航發(fā)射魚雷過程仿真
孫玉松, 李宗吉, 練永慶
(海軍工程大學 兵器工程系, 湖北 武漢, 430033)
無人水下航行器(UUV)外掛魚雷具有重要的戰(zhàn)術價值。由于UUV體積小、質量輕, 自航發(fā)射魚雷時運動狀態(tài)會發(fā)生改變。為了定量分析這種變化以驗證發(fā)射的可靠性, 建立了UUV自航發(fā)射魚雷的運動模型, 根據(jù)此模型利用FLUENT對發(fā)射過程進行了仿真。仿真結果表明, UUV發(fā)射魚雷時運動狀態(tài)會發(fā)生一定的變化, 但采用自航發(fā)射仍然具有可行性。同時得出魚雷脫離發(fā)射導軌時的運動參數(shù), 為精確計算魚雷的外彈道提供了依據(jù)。
無人水下航行器; 外掛魚雷; 自航式發(fā)射; FLUENT
0 引言
無人水下航行器(unmanned underwater vehicle, UUV)顧名思義就是指無人操縱的水下航行器, 通常由水面艦艇或潛艇布放入水[1], 軍用無人水下航行器是指參與軍事行動的無人水下航行器。
UUV最早出現(xiàn)在20世紀60年代[2], 但在較長的時間里只見于民用, 主要用于代替潛水員進行深水勘探、沉船打撈和水下電纜鋪設及維修, 主要采用有纜的工作方式。直到20世紀90年代中期, 或許是受到無人機使用效果的啟發(fā), 美國海軍提出利用UUV進行水下偵查、通信、反潛和反水雷[3], 以解決在這些方面現(xiàn)有武器所遇到的問題。
從UUV上發(fā)射魚雷武器可使發(fā)射點既靠近目標又遠離高價值平臺, 具有響應迅速和隱蔽性好的特點[4]。但UUV發(fā)射魚雷不同于潛艇。UUV具有體積小、質量輕的特點, 其運動狀態(tài)在發(fā)射魚雷的過程中會因受到魚雷自航運動的干擾而發(fā)生變化, 甚至可能產(chǎn)生失穩(wěn)而導致發(fā)射失敗。為了驗證UUV發(fā)射重型魚雷的可行性, 本文建立了UUV自航發(fā)射魚雷的運動模型; 在此基礎上利用FLUENT軟件對從魚雷啟動到脫離發(fā)射導軌這段時間UUV的運動過程進行了仿真。同時對仿真結果進行了分析。
1 UUV自航發(fā)射魚雷的運動模型
在FLUENT求解器中, 可以求得UUV和魚雷在大地坐標系中的阻力、升力和力矩。根據(jù)這些力和力矩, 使用依據(jù)UUV自航發(fā)射魚雷的動力學和運動學方程編寫的用戶自定義函數(shù)(user defined functions, UDF)可計算出UUV和魚雷在下一時刻的運動參數(shù)。
1.1 工作原理
在UUV底部加裝發(fā)射導軌, 魚雷外掛在導軌之上。結構示意圖如圖1所示。
圖1 結構示意圖
自航發(fā)射時, 魚雷推進系統(tǒng)推動魚雷沿發(fā)射導軌向前運動, 至魚雷脫離發(fā)射導軌, 發(fā)射過程結束。
1.2 3個坐標系
分析UUV受力, 需要用到3個坐標系, 分別是地面坐標系, 速度坐標系和體坐標系。3個坐標系及其關系如圖2所示。
圖2 3個坐標系
1.3 掛載魚雷前UUV的受力
UUV在水中的運動可以分為在速度坐標系平面內的平動和繞質心的轉動。由于UUV在運動過程中結構不會發(fā)生變化, 因此可以將UUV看做一個剛體。在速度坐標系中, UUV受力如下
其中
1.4 自航發(fā)射時魚雷對UUV的作用力

1.5 UUV動力學和運動學方程組
從自航發(fā)射開始, 到魚雷脫離導軌。UUV動力學方程如下。
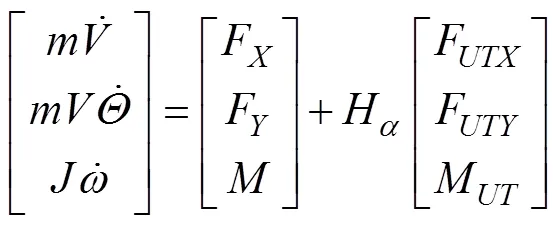
其中

, , 均是在速度坐標系下的運動學參數(shù)。在地面坐標系中的運動學方程組如下
2 仿真過程
2.1 Gambit建模與網(wǎng)格劃分
利用Fluent對UUV自航發(fā)射魚雷過程進行仿真分析, 是目前在沒有實體模型條件下對發(fā)射過程進行預測的一種手段。首先利用Gambit生成UUV自航發(fā)射魚雷的計算域并進行網(wǎng)格劃分。計算域為UUV和魚雷周圍的一個圓柱形區(qū)域。采用非結構網(wǎng)格對計算域進行劃分, 并對魚雷和UUV首尾部分的網(wǎng)格進行加密。模型簡化了UUV和魚雷外部結構, 為了保證網(wǎng)格質量, 用于連接UUV和魚雷的導軌未畫出。UUV和魚雷的相互影響由UDF中的公式算出。設置入口邊界為速度入口; 出口為出流(outflow)邊界; 外邊界為Wall; 將UUV和魚雷表面設置為Wall。并分別命名為UUV和torpedo。計算域設置為流體。網(wǎng)格劃分結束之后局部網(wǎng)格如圖3所示。
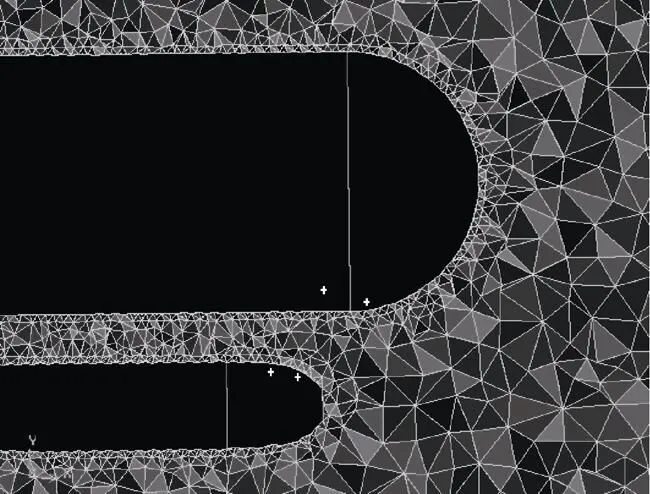
圖3 計算域部分網(wǎng)格
2.2 Fluent仿真條件設置

表1 發(fā)射初始參數(shù)
首先使用定常模型對流場進行初始化計算, 直到殘差因子符合要求。然后設置求解器為非定常。并將根據(jù)UUV自航發(fā)射魚雷動力學和運動學方程組編寫的UDF分別加載到代表UUV和魚雷的壁面上。因UUV和魚雷的運動導致網(wǎng)格變形。故采用彈性模型和網(wǎng)格重構對網(wǎng)格進行重新劃分。在網(wǎng)格重構中使用尺寸函數(shù)并選定新網(wǎng)格質量必需有所提高。每次計算域發(fā)生改變時標記所有網(wǎng)格。參考Mesh Scale info中的參考值, 將最大單元畸變設為0.65。
在發(fā)射過程中, UUV和魚雷表面壓強如圖4~圖6所示。
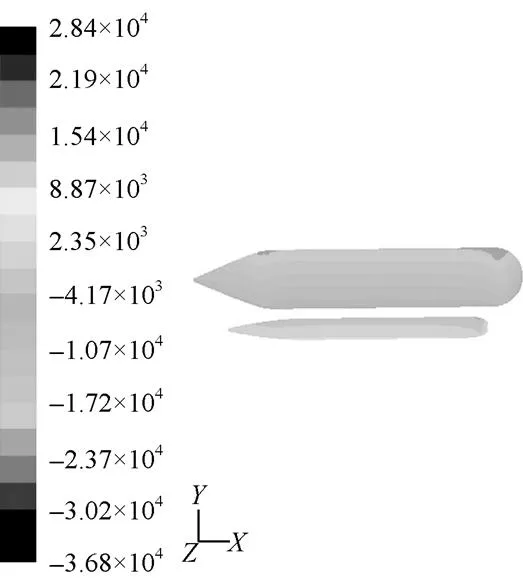
圖4 0.02 s時表面壓強
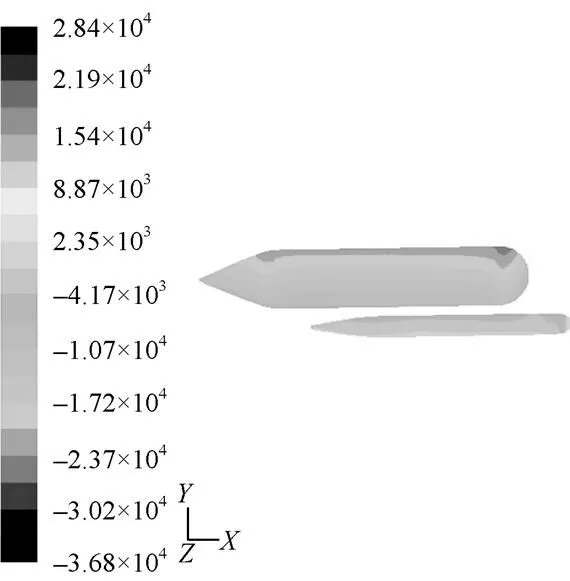
圖5 3s時表面壓強
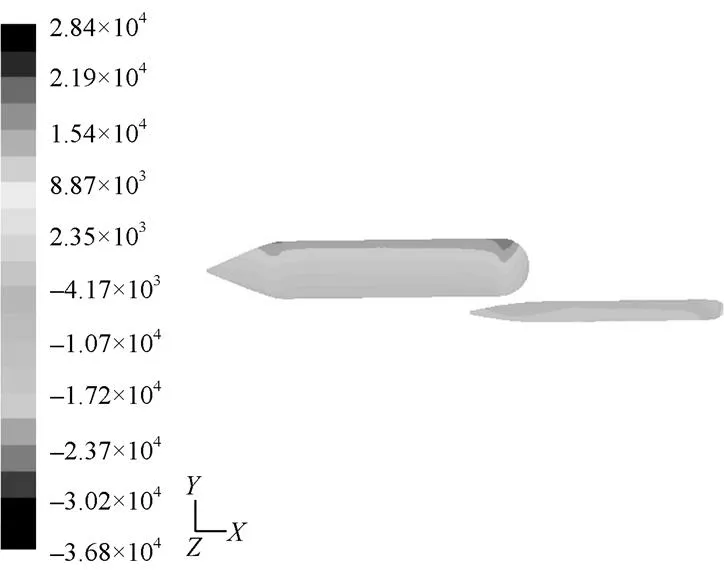
圖6 發(fā)射結束時表面壓強
3 仿真結果與分析
3.1 仿真結果
UUV在發(fā)射魚雷過程中, 部分運動參數(shù)變化過程如圖7~圖10所示。
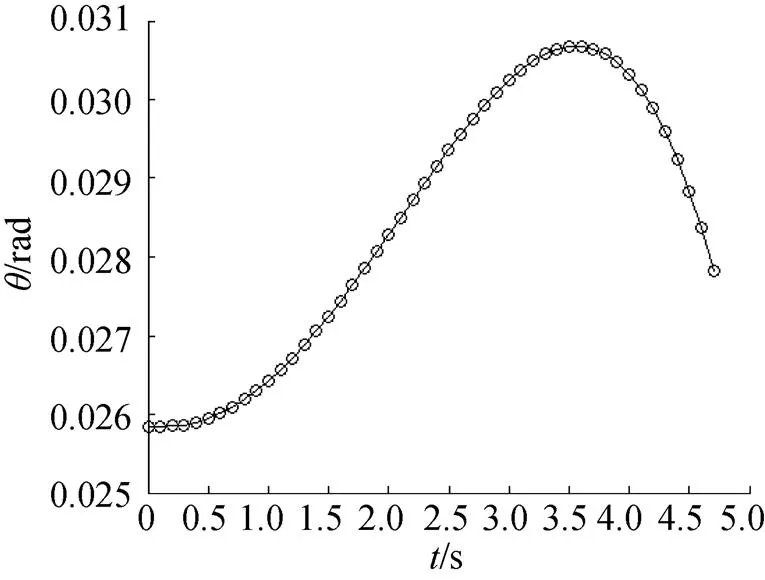
圖7 UUV俯仰角變化曲線
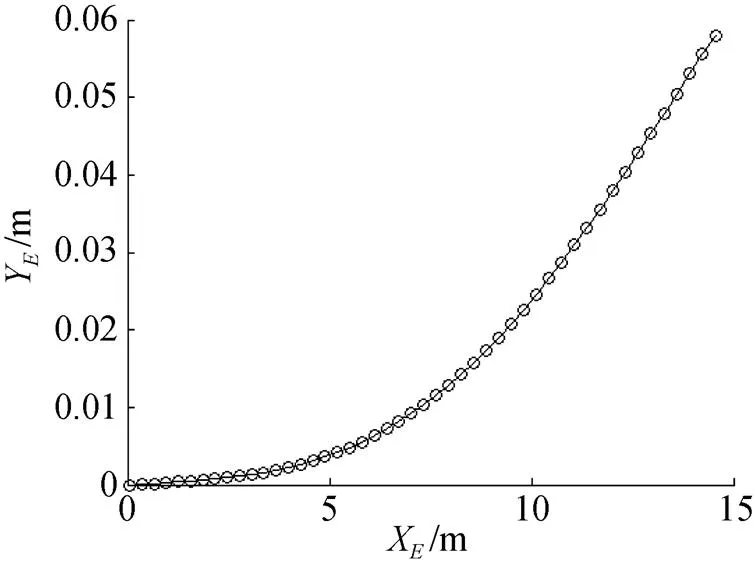
圖8 UUV位移曲線

圖9 UUV阻力變化曲線
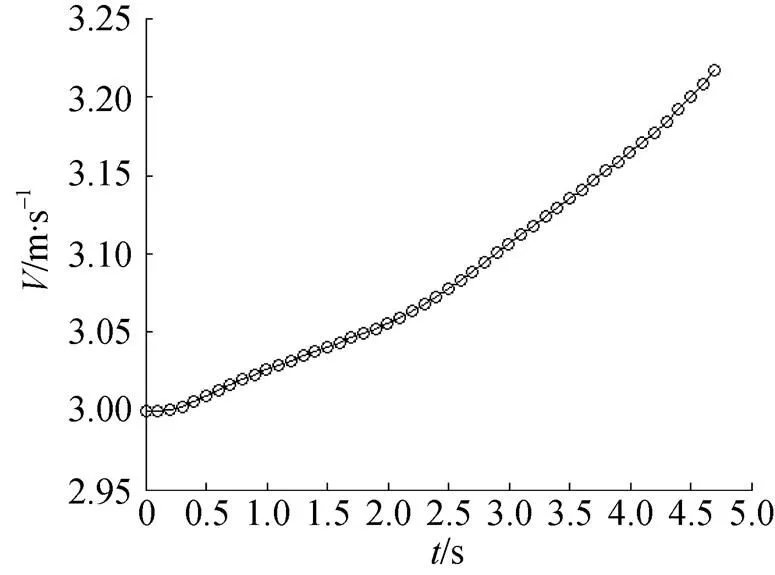
圖10 UUV速度變化曲線
3.2 仿真結果分析
發(fā)射共耗時4.70 s, 隨著發(fā)射的進行, UUV俯仰角開始的時候有所增加, 主要是受魚雷摩擦力產(chǎn)生的正力矩的影響。但隨著魚雷相對于UUV前移一定距離后, 由魚雷負浮力產(chǎn)生負力矩使得UUV俯仰角開始減小。但由于UUV具有較大的轉動慣量和水中附加質量。在運動過程中UUV俯仰角變化較小。變化幅度約為0.005弧度。從圖中可以發(fā)現(xiàn), UUV的阻力最終是減小的。按照阻力公式, 在UUV速度增大的情況下, 其所受阻力應當增大。但在發(fā)射魚雷過程中, 魚雷向前加速運動, 導致UUV周圍流場改變, 使得UUV阻力減小。UUV的速度在不斷的增加, 這是向前運動的魚雷對其作用的摩擦力及自身流體阻力減小的結果。在發(fā)射過程中, UUV和魚雷艏部壓強分布如圖11所示。
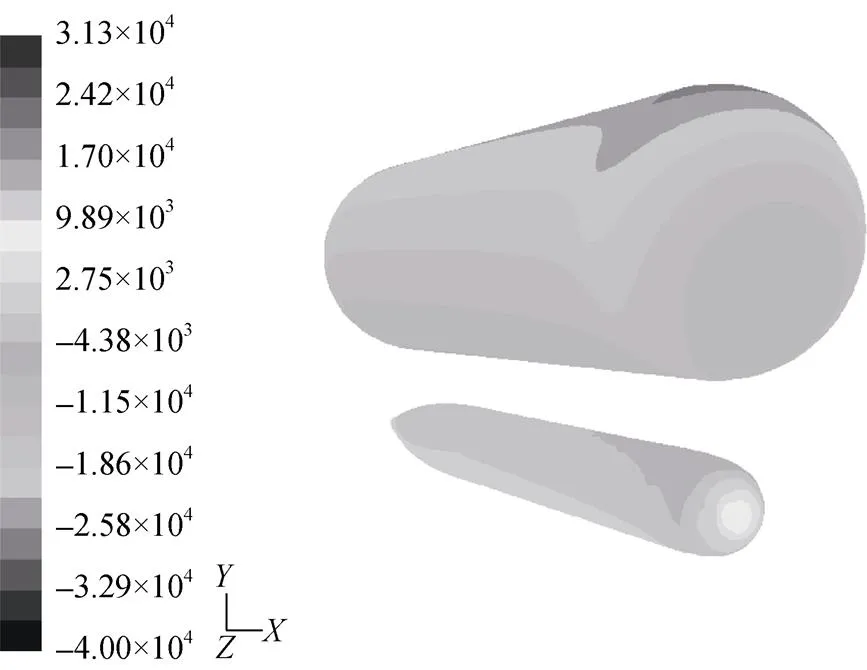
圖11 UUV和魚雷艏部壓強
仿真結果表明, UUV運動參數(shù)會發(fā)生一定變化, 但幅度很小。利用UUV自航發(fā)射外掛的重型魚雷具有良好的可行性。發(fā)射完成時, 即魚雷轉入下一階段運動的初始時刻, 魚雷運動參數(shù)如表2所示。

表2 魚雷脫離導軌時運動參數(shù)
4 結束語
本文根據(jù)多剛體動力學關系推導了UUV自航發(fā)射魚雷過程中的動力學和運動學方程組。并利用FLUENT對發(fā)射過程進行了仿真。仿真結果驗證了UUV自航發(fā)射魚雷的可行性。同時得出的魚雷離開導軌時的運動參數(shù), 為精確計算魚雷脫離UUV后的外彈道提供了依據(jù)。
[1] 張紅. 多用途無人駕駛水下航行體[J]. 水雷戰(zhàn)與艦船防護, 1997, 15(2): 21-25.
[2] 許韋韋, 孟昭香. 新興的水下作戰(zhàn)平臺UUV[J]. 指揮控制與仿真, 2006, 28(3): 16-19.Xu Wei-wei, Meng Zhao-xiang. UUV, the Rising Underwater Operation Platform[J]. Command Control & Simulation, 2006, 28(3): 16-19.
[3] 孫現(xiàn)有, 焦?jié)山? 宋長會. 無人水下航行器發(fā)展與應用[J]. 水雷戰(zhàn)與艦船防護, 2012, 20(2): 51-54.Sun Xian-you, Jiao Ze-jian, Song Chang-hui. Development and Application of Unmanned Underwater Vehicles[J]. Mine Warfare& Ship Self-Defence, 2012, 20(2): 51-54.
[4] 周杰. 基于CFD的UUV外掛魚雷位置分析[J]. 魚雷技術, 2010, 18(6): 414-418.Zhou Jie. Analysis of Torpedo Positions Externally Hanged on UUV Based on CFD[J]. Torpedo Technology, 2010, 18(6): 414-418.
[5] 徐宣志, 歐陽呂偉, 嚴忠漢, 等. 魚雷力學[M]. 北京:國防工業(yè)出版社, 1992.
[6] 練永慶, 王樹宗. 魚雷發(fā)射裝置設計原理[M]. 北京: 國防工業(yè)出版社, 2012: 65-66.
(責任編輯: 許妍)
Process Simulation of Torpedo Swim-out Launching from UUV
SUN Yu-songLI Zong-jiLIAN Yong-qing
(Department of Weaponry Engineering, Naval University of Engineering, Wuhan 430033, China)
Externally hung torpedo on an underwater unmanned vehicle(UUV) is of great tactical significance in warfare. Because UUV is small in volume and light in weight, its movement state will change when a torpedo swims out from it. In this paper, to analyze quantitatively the parameter change for verifying the reliability of torpedo launching, a movement model of a torpedo swim-out launching from UUV is built, and the launching process is simulated by the software FLUENT. Simulation results indicate that the movement state of UUV changes in the launching process, but this change will not significantly affect torpedo swim-out launching. In addition, the movement parameters of the torpedo leaving the launcher are obtained, which may provide a reference for precise calculation of torpedo’s exterior trajectory.
underwater unmanned vehicle(UUV); externally hung torpedo; swim-out launch; FLUENT
TJ635
A
1673-1948(2014)05-0396-05
2014-05-05;
2014-06-28.
孫玉松(1991-), 男, 在讀碩士, 主要研究方向為兵器發(fā)射與動力推進技術.