一種無主慣導參數注入的姿態角在線修正算法
2014-02-27 07:04:10楊管金子洪劍英王立文國琳娜
水下無人系統學報 2014年1期
楊管金子, 洪劍英, 王立文, 國琳娜
?
一種無主慣導參數注入的姿態角在線修正算法
楊管金子1,2, 洪劍英1, 王立文1,2, 國琳娜1,2
(1. 中國船舶重工集團公司第705研究所, 陜西 西安, 710075; 2. 水下信息與控制重點實驗室, 陜西 西安, 710075)
現役輕型魚雷敏感元件多采用框架式陀螺, 而從框架式陀螺到捷聯慣性技術的更新換代, 給在役魚雷發射平臺武器發控系統接口帶來一系列問題。基于此, 研究了一種姿態在線修正算法, 該算法射前無需發射平臺注入導航參數信息, 射后根據加速度計提取姿態角, 于魚雷定常運動段對航姿誤差進行在線修正, 以達到穩定控制的目的, 并能夠保持原有發射平臺武器發控系統接口不變。仿真結果表明, 該算法極大地縮短了魚雷在發射載體平臺上的準備時間, 保證了輕型魚雷在航行過程中的姿態穩定控制要求。
輕型魚雷; 發控系統; 姿態角; 在線修正
0 引言
目前在役輕型魚雷采用框架式陀螺, 在發射出管瞬間依靠儲能發條快速啟動轉子, 建立魚雷航向基準, 之后慣轉保持, 入水后上電正常工作。而水平姿態角信息則是在入水后依靠擺式加速度計提取, 同時角速度信息根據速率陀螺獲取。該方案配置無論從結構、供電、信息處理等方面都很復雜, 系統難于維護。同時, 隨著慣性技術的發展, 世界先進魚雷均采用捷聯慣導技術實現魚雷的航姿測量, 而從框架式陀螺到捷聯慣性技術的更新換代, 絕不是簡單的替換, 將給魚雷的發射帶來一系列問題[1-3]。采用捷聯慣性測量技術的魚雷武器在射前流程中通常具有初始對準過程。目前廣泛使用的傳遞對準技術, 需要發射平臺在一定時間內定時傳遞航向姿態、速度及位置等導航參數, 同時為加快對準濾波的收斂速度, 還需要發射平臺以一定的姿態和速度進行一段時間的特定機動運動, 這些都會使發射平臺的安全性和魚雷的作戰使用效能受到影響[4-5]。另一方面, 基于捷聯系統采用傳統的慣性技術, 將會對在役魚雷的發射平臺武器發控系統接口帶來巨大改變, 這種改變對于魚雷裝備的現實狀況是不能接受的。因此, 需要探索研究一種射前無需發射平臺注入導航信息, 從而保持現役輕型魚雷對外接口不變的航姿算法。
在保持現役輕型魚雷對外接口不變的前提下,針對初始對準需要射前留有足夠準備時間從而延誤戰機、對準期間要求發射載體作特定機動對發射載體平臺會造成不安全隱患的問題, 本文提出一種基于加速度計提取的姿態角在線修正算法, 在魚雷出管時設定航向角為0, 同時利用加速度計提取俯仰和橫滾角, 進行簡單粗對準, 快速建立初始“數學平臺”, 之后在入水后的穩定航行過程中, 對姿態角誤差進行估計, 并對其航姿進行修正, 從而達到穩定控制的目的。
1 姿態角在線修正算法
輕型魚雷作戰特性主要是基于多平臺的發射方式, 入水后采用環形和直航搜索模式, 依靠自導搜索目標進行攻擊, 對主航向沒有需求。因此, 輕型魚雷入水后, 通過水平姿態修正, 使用相對航行以及姿態角測量即可滿足魚雷對目標攻擊的使用需求。

由于粗對準時發射方向是隨機的, 而航向角卻取0, 導致地球自轉在水平通道的誤差影響無法補償, 同時, 在建立初始“數學平臺”時雷體處于初始段高動態運動工況, 造成的姿態誤差也很大, 隨著航行時間的增加, 姿態誤差無法滿足輕型魚雷控制的精度需要。為此, 利用穩態航行時由加速度計提取的姿態角不隨時間累積發散的特點, 在穩定航行段對加速度計輸出進行濾波預處理后提取姿態角, 對捷聯解算的姿態誤差進行估計并加以修正; 另一方面, 在某一地區作戰, 其地區緯度值基本可以確定, 地球自轉在航向通道的誤差可以做到很小, 配合本文提出的姿態修正算法, 系統航姿角可以滿足控制系統的穩定控制需要, 實現無需射前對準的捷聯慣性測量[6]。
利用加速度計提取姿態角, 射后對航姿角進行修正的算法框圖如圖1所示。
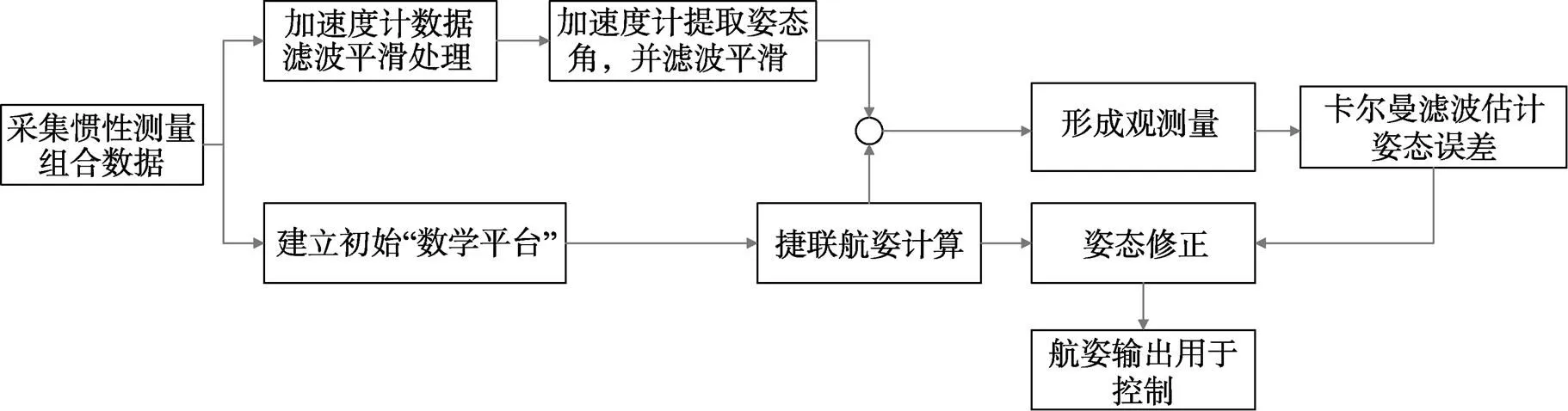
圖1一種姿態修正算法框圖
魚雷發射出管后入水, 采集慣性測量組合數據, 即陀螺輸出和加計輸出, 通過加計提取俯仰與橫滾角進行粗對準快速建立起“數學平臺”, 并開始進行捷聯解算。控制系統根據捷聯解算出的航姿及慣性測量組合測量的雷體運動狀態進行控制,“拉平”魚雷。根據加速度計輸出及深度傳感器輸出判定雷體是否處于穩定航行狀態, 在此過程中對雷體的速度測量沒有需求。進入穩定航行階段后開始進行加計提取姿態角及濾波修正算法流程。在濾波修正算法過程中, 每50 ms進行一次卡爾曼濾波估計失準角誤差, 每20 s對姿態矩陣進行一次修正, 修正后提取姿態角。
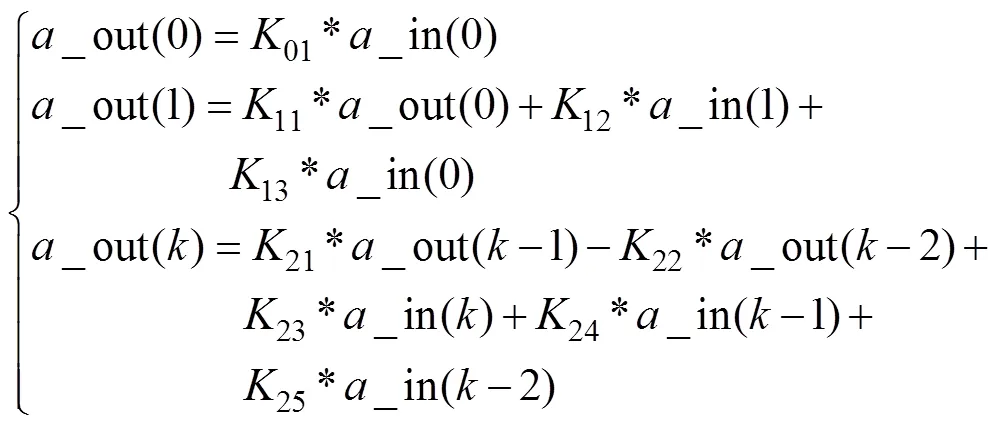
在姿態在線修正過程中, 魚雷入水后的環境相對平臺上要復雜的多, 加計敏感到的隨機干擾和噪聲也隨之增加, 因此, 通過對加計輸出進行平滑處理, 以減小隨機誤差的影響, 提高估值的精度。
對加速度計數據進行濾波平滑處理, 其平滑提取為
加速度計提取姿態角算法由下式計算

加速度計提取姿態角濾波平滑算法如下

然后進行卡爾曼濾波, 估計由于惡劣動態環境下粗對準和由于無準確導航參數注入時帶來的大姿態角誤差, 對誤差進行修正, 修正后的姿態角送控制系統用于穩定控制。
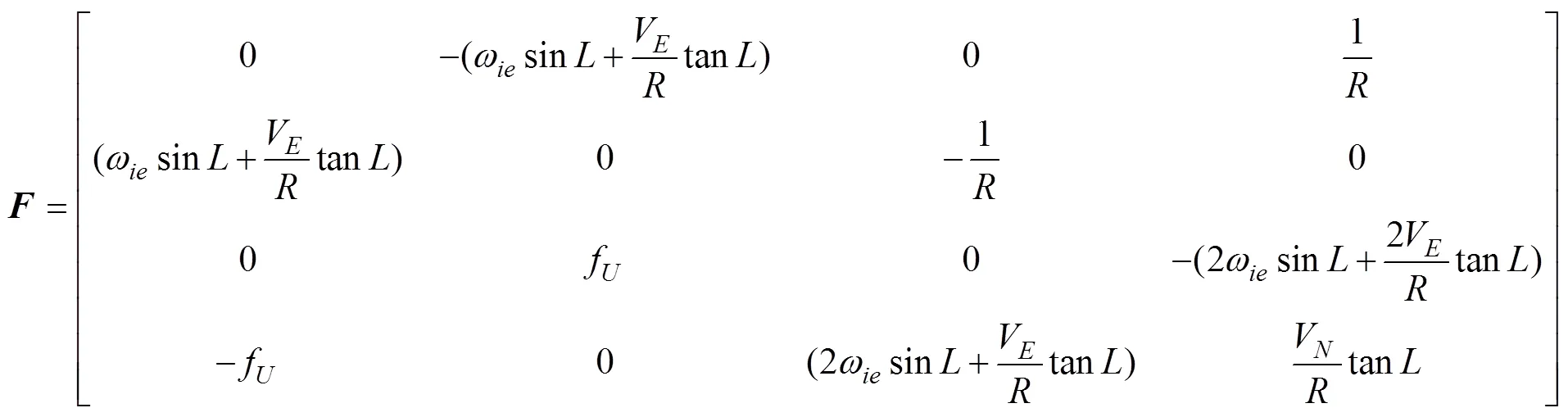
卡爾曼濾波過程采用簡化模型, 在狀態量中忽略陀螺漂移、加計零偏和安裝誤差角, 以北、東向的失準角和速度誤差為狀態量構建卡爾曼濾波模型, 量測量采用上述的俯仰與橫滾角的姿態匹配方法, 其濾波過程及公式如下

其中
由加速度計提取的姿態角與捷聯解算的姿態角構成觀測量
則量測陣為
2 試驗及其仿真
本文主要從數學仿真、陸地車載試驗數據仿真進行分析。
在數學仿真中, 為了說明由于無導航參數注入時帶來的姿態誤差, 假設真實航行向南, 而設定初始航向為0°, 俯仰與橫滾角通過加計提取后進行簡單粗對準, 比較2種算法的導航解算后橫滾角誤差曲線。第1種算法在完成簡單的粗對準后, 僅進行純導航解算; 第2種算法在導航解算過程中, 進行了姿態角的在線修正, 每隔20 s通過卡爾曼濾波值對姿態陣進行一次修正。對2種算法分別進行20 min仿真分析。圖2給出修正與不修正的對比結果[7]。
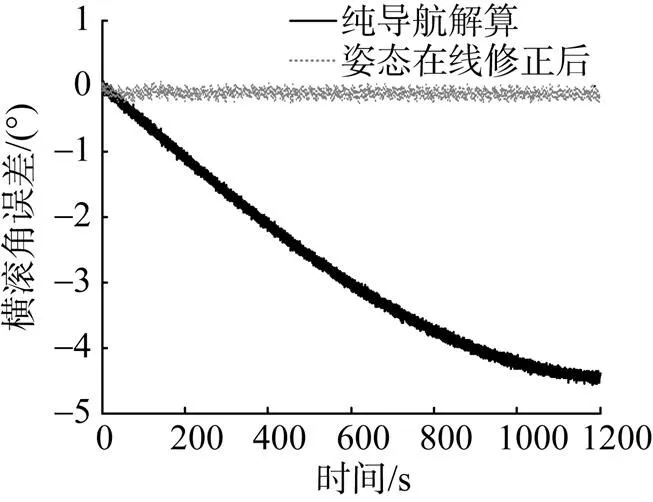
圖2 仿真條件下(緯度)純導航和在線修正后導航解算橫滾角誤差曲線(與理論值比較)

利用其他項目的車載試驗數據進行仿真, 該項目試驗時將一套高精度導航系統(法國phins)與被測導航產品同時安裝在試驗支架上, 試驗支架保證了被測導航產品與基準phins之間的安裝誤差控制在允許范圍內, 以phins為基準, 判定被測產品的導航誤差。
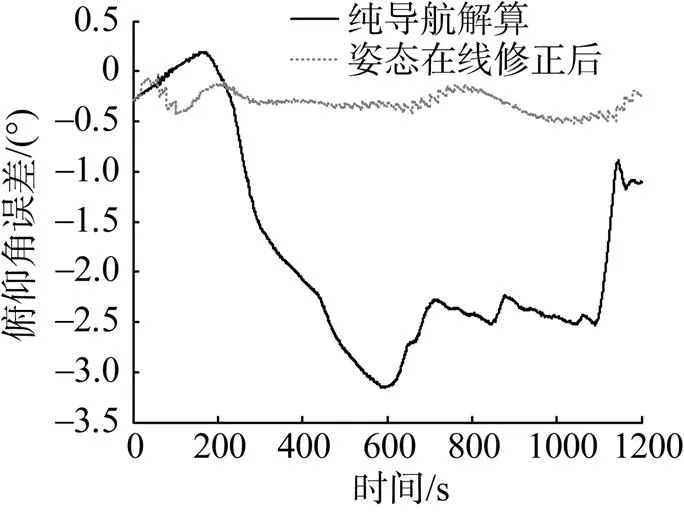
圖3 車載試驗條件下純導航和在線修正后導航解算俯仰角誤差曲線(與phins比較)
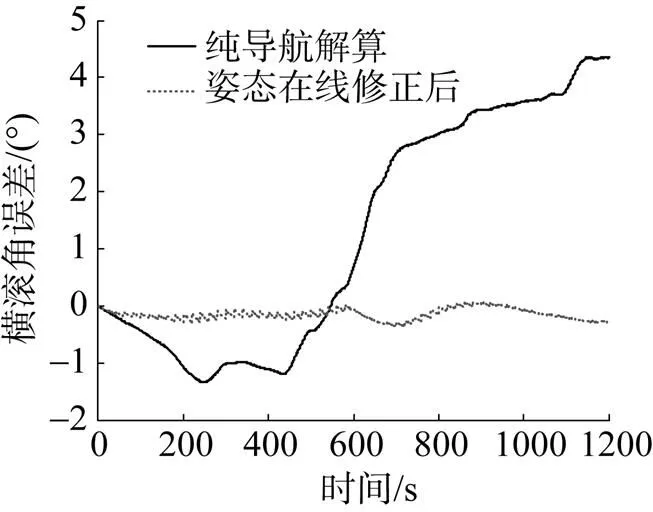
圖4 車載試驗條件下純導航和在線修正后導航解算橫滾角誤差曲線(與phins比較)
仿真結果表明, 在線修正方法在魚雷航行過程中, 能夠保證姿態角具有足夠的精度, 可以滿足魚雷航行的穩定控制需求; 由于省略了魚雷在發射載體平臺上的精對準過程, 同時, 簡單粗對準可以安排在入水后進行, 因此該方法能夠大幅度的縮短魚雷在平臺上的發射準備時間。
3 結束語
本文針對輕型魚雷的快速對準以及多平臺發射的作戰需求, 在簡化模型的基礎上, 提出一種基于加速度計提取的姿態角在線修正算法, 并對純導航解算和在線修正進行仿真比較分析, 結果表明, 經過姿態角在線修正后, 能夠保證輕型魚雷在航行過程中的姿態穩定控制的需求。
姿態角入水后在線修正算法, 射前無需發射平臺注入主慣導參數進行傳遞對準, 射后利用穩定直航段對姿態角誤差進行修正。該算法較大程度上縮短魚雷在發射載體平臺上的準備時間, 避免延誤戰機。同時, 無需從發射載體平臺上獲取主慣導導航數據信息, 降低了輕型魚雷初始對準對載體平臺機動和信息的依賴, 無需改變現役輕型魚雷對外接口。
[1] 李建辰. 魚雷定位技術[M]. 北京: 國防工業出版社, 2009.
[2] 以光衢. 慣性導航原理[M]. 北京: 航空工業出版社, 1987.
[3] 秦永元. 慣性導航[M]. 北京: 科學出版社, 2005.
[4] 劉毅, 劉志儉.捷聯慣性導航系統傳遞對準技術研究現狀及發展趨勢[J]. 航天控制. 2004, 22(5): 50-55. Liu Yi, Liu Zhi-jian. The Research Status and Development Trend of Transfer Alignment for SINS[J]. Aerospace Control, 2004, 22(5): 50-55.
[5] Zhao Lin, Gao Wei, Li Pu, et al. The Study on Transfer Alignment for SINS on Dynamic Base[C]//IEEE International Conference on Mechatronics and Automation. Niagara, Canada: IEEE, 2005: 1318-1322.
[6] 國琳娜, 金文凱.魚雷精確定位的組合導航技術研究[J]. 魚雷技術, 2001, 9(1): 27-28.
[7] 胡聯貴, 張靖, 李召. 模擬彈體內IMU輸出與卡爾曼濾波研究[J]. 彈箭與制導學報, 2009, 29(3): 13-16.Hu Lian-gui, Zhang Jing, Li Zhao. Simulation of IMU Output Signal in Missile and Research on Kalman Filter[J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2009, 29(3): 13-16.
(責任編輯: 楊力軍)
An On-line Modifying Algorithm of Lightweight Torpedo Attitude Angle without Data from MINS
YANG Guan-jin-zi, HONG Jian-ying, WANG Li-wen,GUO Lin-na
(1. The 705 Research Institute, China Shipbuilding Industry Corporation, Xi′an 710075, China; 2. Science and Technology on Underwater Information and Control Laboratory, Xi′an 710075, China)
The sensors in a lightweight torpedo in service often employ framed gyroscope. However, some problems are br- ought to launch control system interface of lightweight torpedo launch platform in updating the framed gyroscope by strapdown inertial technology. In this paper, an on-line modifying algorithm of lightweight torpedo attitude angle is proposed. The algorithm doesn’t need any navigation parameter data from launch platform before launch, extracts the attitude angle by accelerometer after launch, and on-line modifies the attitude angle error in steady motion segment in order to achieve stable control. And it supports the original launch control system interface of lightweight torpedo launch platform. Simulation result shows that this algorithm greatly reduces the torpedo preparation time on launch platform, and keeps steady control of lightweight torpedo attitude angle during running.
lightweight torpedo; launch control system; attitude angle; on-line modifying
TJ630.33; TP13
A
1673-1948(2014)01-0039-05
2013-10-15;
2013-12-11.
楊管金子(1988-), 男, 在讀碩士, 主要研究方向為武器系統與運用工程制導技術.
