ZL29濾棒成型機組濾棒加速輪輪廓參數的設計
2014-02-23 08:09:19王志剛劉鈺金風凱
煙草科技 2014年11期
關鍵詞:設計
王志剛,劉鈺,金風凱
中煙機械技術中心有限責任公司,上海市浦東新區金海路1000號 201206
ZL29濾棒成型機組濾棒加速輪輪廓參數的設計
王志剛,劉鈺,金風凱
中煙機械技術中心有限責任公司,上海市浦東新區金海路1000號 201206
為滿足自主研發濾棒成型機組的需要,對ZL29濾棒成型機組濾棒加速輪輪廓參數的設計方法進行了研究。通過對濾棒加速原理進行歸納分析,對濾棒加速作了運動學分析計算,得出了速度和加速度規律,并提出了一種加速輪輪廓參數設計的計算方法。以100,120和132 mm 3種濾棒長度為例進行計算,并將計算結果與德國Hauni公司提供的設計數據對照。結果表明:計算結果與設計數據良好吻合,驗證了該計算方法的正確性。該設計方法可用于濾棒成型機組的研發設計。
ZL29濾棒成型機組;濾棒加速;加速輪;輪廓參數;運動學
近年來隨著纖維濾棒成型技術的日臻成熟和完善,我國的濾棒成型設備也經歷了從無到有、從低速到高速、自主開發與引進技術交替進行的過程。伴隨著眾多項目的實施,國內學者對濾棒成型機組中成型機部分進行了較多研究,如成型槍[1]、布帶輪[2]、紙盤架裝置[3]等。濾棒加速技術作為成型機濾棒傳輸的重要組成部分,加速輪是實現加速運動所需的核心元件,其正確設計對于完成濾棒加速傳輸具有決定作用,而目前關于其設計方法的相關研究報道較少。ZL29濾棒成型機組是引進德國Hauni公司AF-KDF4成型技術研發的一種新型濾棒生產設備,濾棒加速采用先進的凸輪加速技術,其加速輪輪廓參數的確定是加速輪設計的關鍵。為此,通過研究濾棒加速原理并分析濾棒加速運動規律,提出了加速輪輪廓參數的設計計算方法,旨在為濾棒成型機組的自主研發設計提供依據。
1 濾棒加速原理
濾棒傳輸的機械結構見圖1。濾條在切割位置處被切刀切割成等長度L的濾棒后,通過兩個同步運動的加速輪加速,濾棒被拉開一定間隙,由連續相接變為間隔分離狀態進入接收鼓輪輪槽中,經次級傳遞系統輸出至下游機器。其中,加速輪外側分布著負壓吸孔,濾棒接觸到加速輪后,依靠負壓吸附在加速輪上,吸附負壓由負壓系統的真空風機提供,采用伺服電機獨立驅動,根據不同的生產速度V調節負壓值。加速輪輪廓為圓弧凸輪,濾棒在加速過程中由于負壓吸附作用,與加速輪輪廓表面無相對滑動,通過加速輪轉動一周,完成一次加速,濾棒獲得一個與行進方向一致的縱向加速,以及與其行進方向垂直的橫向加速。
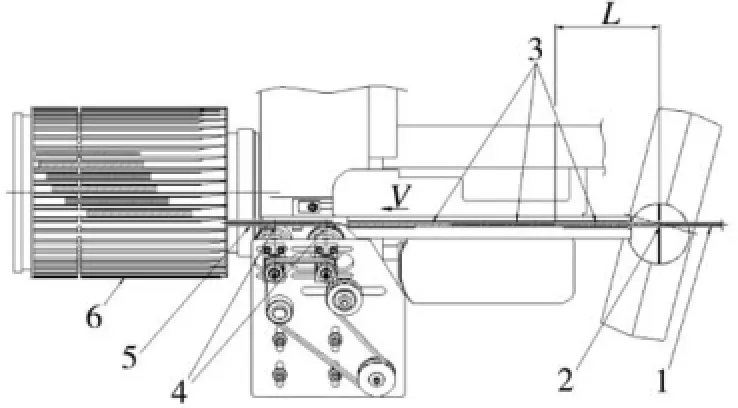
圖1 濾棒傳輸機械結構示意圖
濾棒加速完成時,前端面到達接收鼓輪端面,并獲得最大的橫向速度。該橫向速度應與接收鼓輪輪槽中心的圓周速度一致,避免由于速度不匹配造成濾棒和接收鼓輪輪槽壁碰撞而影響濾棒品質,并將濾棒在恰當的位置傳送至接收鼓輪中。生產不同長度規格的濾棒應選擇相應輪廓參數的加速輪。
2 濾棒加速運動學分析計算
2.1 加速輪幾何模型
兩加速輪幾何輪廓完全相同,由兩段相切圓弧構成,見圖2。其中,基圓圓弧半徑為Rb;單圓弧凸輪半徑為R,圓心角為φ,升程角為β;偏心距e=R-Rb,O為轉動中心。
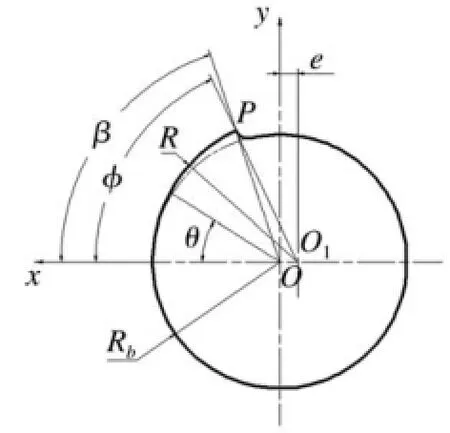
圖2 加速輪幾何模型
2.2 運動學分析計算
根據濾棒加速原理,單位時間內生產多少支濾棒則加速輪相應轉動多少圈,故加速輪轉速為:

式中:V為生產速度,m/min;L為生產濾棒的長度,mm。
那么,加速輪轉動角速度ω為:

加速運動機構簡圖見圖3。其中,V合為濾棒運動速度,V橫為濾棒橫向加速的速度,V縱為濾棒縱向加速的速度。
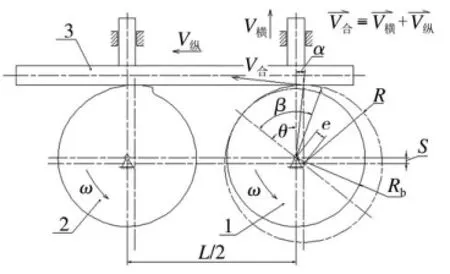
圖3 濾棒加速機構簡圖
2.2.1 橫向加速
橫向加速為平底直動從動件凸輪機構,加速輪轉動角度θ(圖3)時,濾棒橫向運動行程S[4-5]為:

式(3)兩端對時間t求導,得濾棒橫向加速的速度V橫為:

式(4)兩端對時間t求導,得濾棒橫向加速的加速度a橫為:

2.2.2 縱向加速
因濾棒在加速過程中與加速輪表面無相對滑動,故加速輪與濾棒接觸點處的圓周速度即為濾棒運動速度V合。圖3可見,濾棒橫向加速的速度V橫與縱向加速的速度V縱滿足下式:

又有:

故由式(4)、式(6)和式(7)可得濾棒縱向加速的速度V縱為:

式(8)兩端對時間t求導,得濾棒縱向加速的加速度a縱為:

2.2.3 加速度
由式(5)和式(9)可得,濾棒加速度a為:

由式(10)可知,對于一定長度規格的濾棒,加速度α的大小僅與生產速度V有關,且與V的平方成正比。為避免濾棒加速過程中吸附力過小而脫離加速輪表面,或吸附力過大而產生變形,造成濾棒圓度[6]不合格等問題,吸附力應盡量與濾棒脫離加速輪表面的力F(F=m濾棒a,m濾棒為濾棒質量)平衡或稍大。因此,加速過程中所需負壓吸附力僅與生產速度V有關,這與前述原理中負壓大小根據生產速度V變化而相應調節是相符的。
3 加速輪輪廓參數的設計
3.1 機械設置
在確定加速輪輪廓前,首先設定機械設置條件:
(1)加速輪與接收鼓輪應調整到確定的機械位置,見圖4。將兩加速輪的中心距設置為L/2,加速輪2轉動中心至接收鼓輪端面的距離為(L/2-δ)。其中,δ為預先設定的加速完成后濾棒尾端至后加速輪加速段輪廓邊緣的距離。預留距離δ的目的是為了保證濾棒脫離加速輪進入接收鼓輪時得到充分的橫向加速。
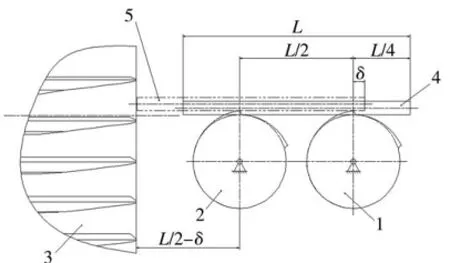
1.加速輪1 2.加速輪2 3.接收鼓輪4.加速開始位置的濾棒5.加速結束位置的濾棒
(2)加速輪與接收鼓輪的轉速應滿足確定的匹配關系。接收鼓輪模數[7]m=5.5 mm,輪槽數Z=42,每生產一支濾棒轉動一個輪槽位置,那么接收鼓輪轉動的角速度ω鼓輪為:

3.2 加速輪輪廓參數的確定
3.2.1 計算方法
需要確定的加速輪輪廓參數有Rb,R和β,3個參數相互關聯,彼此滿足一定的約束關系。現結合加速原理、運動分析結論及機械設置條件,對輪廓參數進行分析求解。
(1)滿足加速輪基圓圓周速度稍大于或等于生產速度V的條件,使濾棒平穩過渡到加速輪上,可得:
計算時先取邊界條件等式:

(2)加速完成時,θ=β。根據加速原理,此時應滿足條件:

接收鼓輪輪槽中心處的半徑r鼓輪為:

則由式(11)和式(15)可得接收鼓輪輪槽中心處圓周速度V鼓輪為:

由式(4)、式(15)和式(16)可得:

(3)如圖2所示,在ΔOO1P中,依正弦定理有:

即:

(4)如圖4所示,濾棒自加速開始至加速結束沿前進方向的位移,應與加速輪加速段的弧長相等,即:

(6)聯立式(13)、式(17)、式(19)、式(20)和式(21)得方程組:

式(22)為非線性方程組,需借助數值解法,利用MATLAB軟件的fsolve函數[8-10]編程求解,可得到Rb,R,β,e,φ的值。
(7)選用基圓半徑Rb為優先數,取R80系列[4],將上述計算所得的Rb值按式(12)的要求圓整為R80系列中的優先數;由式(17)可知e≥2.75,將解得的偏心距e規范為標準值,供選值是以0.05 mm為公差的等差數列[2.75,2.80,2.85,2.90,2.95,3.00,…],按就近原則選取;再由式(17)計算β。由此可最終確定輪廓參數Rb,R,β的值。
3.2.2 計算驗證
分別取濾棒長度100,120和132 mm,預先設定δ為5 mm,按上述計算方法求解得出加速輪輪廓參數,并與德國Hauni公司提供的加速輪設計數據進行對比,見表1。可見,求解結果與Hauni公司設計數據良好吻合,驗證了該計算方法的正確性。
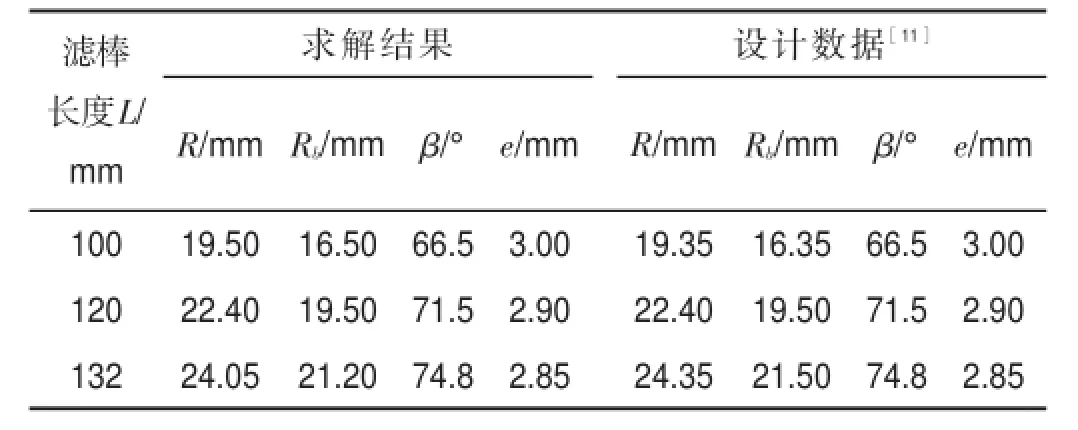
表1 加速輪輪廓參數求解結果與設計數據對比
4 結語
對ZL29濾棒成型機組濾棒加速原理進行了歸納分析,并對濾棒加速作了運動學分析計算,得出了速度和加速度規律,在此基礎上研究總結了加速輪輪廓參數的設計計算方法。以常用的3種濾棒長度為例進行計算,并將計算結果與德國Hauni公司提供的原始設計參數對比,結果良好吻合,驗證了該設計計算方法的正確性。該方法可用于濾棒成型機組的自主研發設計或設備改造。
[1]劉春林.ZL22濾棒成型機組成型槍冷卻系統的改造[J].煙草科技,2007(3):29-30.
[2]韓紅彬.一體式布帶輪在ZL27型濾棒成型機組上的應用[J].煙草科技,2011(10):24-25.
[3]韓紅彬.KDF2濾棒成型機組紙盤架裝置的改進[J].煙草科技,2011(12):23-25.
[4]成大先.機械設計手冊:第1卷[M].5版.北京:化學工業出版社,2007.
[5]李紅強,錢志良,鹿霖.平底從動件盤形凸輪機構的研究[J].機械設計與制造,2005(2):26-28.
[6]GB/T 5605—2002煙草和煙草制品醋酸纖維濾棒[S].
[7]程衛民,孫斌,趙朝陽,等.PROTOS2-2高速卷接機組調頭輪技術的改進[J].煙草科技,2010(1):15-17.
[8]陽明盛,熊西文,林建華.MATLAB基礎及數學軟件[M].1版.大連:大連理工大學出版社,2003.
[9]TheMathWorks,Inc.MATLABreferenceguide-high performance numeric computation and visualization software[M].New York:The Math Works,Inc,1992.
[10]李耀輝,劉保軍.非線性代數方程組實根求解研究現狀綜述[J].武漢科技大學學報:自然科學版,2004,27(3):326-330.
[11]德國Hauni公司.KDF4運動學和動力學分析計算[G].2012.
Design for Profile Parameters of Filter Rod Accelerating Wheel in Filter Rod Maker ZL29
WANG Zhigang,LIU Yu,and JIN Fengkai
China Tobacco Machinery Technology Center Co.,Ltd.,Shanghai 201206,China
In order to develop a new filter rod maker,the design method for the profile parameters of filter rod accelerating wheel in filter rod maker ZL29 was studied.By kinematics analysis,the velocity and accelerated velocity were obtained,and the calculation method for profile parameters of filter rod accelerating wheel was summarized.By taking the filter rods of 100,120 and 132 mm in length as examples,the calculated results were compared with the design data provided by Hauni.They were well agreed,it verified the correctness of the calculation method.
Filter rod maker ZL29;Filter rod accelerating;Accelerating wheel;Profile parameter;Kinematics
TS457
B
1002-0861(2014)11-0018-04
王志剛(1973—),碩士,工程師,主要從事濾棒成型機的設計與開發。E-mail:13585681916@163.com
2014-04-29
責任編輯:曹娟E-mail:cj254@126.com
電話:0371-67672669
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
