基于ADAMS的麥弗遜懸架的動力學仿真和優化
2014-02-20 10:50:08童寧娟肖云娜惠鵬王鋒剛
汽車實用技術 2014年11期
關鍵詞:優化
童寧娟,肖云娜,惠鵬,王鋒剛
(陜西漢德車橋有限公司,陜西 西安 710201)
基于ADAMS的麥弗遜懸架的動力學仿真和優化
童寧娟,肖云娜,惠鵬,王鋒剛
(陜西漢德車橋有限公司,陜西 西安 710201)
本文以多剛體系統動力學為理論基礎,應用多體運動學與動力學仿真軟件ADAMS 中的Car專業模塊建立了麥弗遜懸架多剛體模型。在對該懸架模型進行了兩側車輪同向跳動的仿真分析后, 研究了前束角(Toe Angle)、車輪外傾角(Camber Angle)、主銷后傾角(Caster Angle)、主銷內傾角(Kingpin Inclination Angle)及車輪轉向角(Steer Angle)五個懸架運動特性參數,同時研究了這五個運動特性參數對汽車的穩態響應特性、直線行駛的穩定性、操縱穩定性等眾多性能的影響。此外,以改善懸架的性能為目標,從ADAMS/Car模塊中導入ADAMS/Insight模塊,對麥弗遜懸架五個運動特性參數進行了優化。最后,對優化前后的懸架運動特性參數曲線進行了比較,并從比較中得到較好的運動特性參數,從而對懸架進行了優化。
ADAMS;麥弗遜懸架;多體系統動力學;仿真與優化
CLC NO.:U461.1Document Code:AArticle ID:1671-7988(2014)11-35-05
引言
由于汽車懸架系統對整車行駛動力學(如操縱穩定性、行駛平順性、舒適性等) 及零部件的壽命有很大的影響,因此,懸架的動力學仿真分析在汽車懸架系統的設計和開發中占有很重要的地位。
本論文就是應用ADAMS這一世界上應用最為廣泛的機械系統動力學分析軟件,對麥弗遜懸架的動力學特性進行仿真,并且通過對前束角(Toe Angle)、車輪外傾角(Camber Angle)、主銷后傾角(Caster Angle)、主銷內傾角(Kingpin Inclination Angle) 及車輪轉向角(Steer Angle)這五個運動特性參數的研究,運用ADAMS/Insight模塊進行虛擬試驗,得出了影響這五個運動特性參數的懸架模型的主要硬點,并且對其進行了修改,達到了優化麥弗遜懸架的目的。
1、建立模型及仿真分析
1.1 模型分析
麥弗遜懸架左右對稱于汽車縱向平面,由下擺臂、轉向
節總成(包括減震器下體、輪轂軸、制動底板等)、轉向橫拉桿、減震器上體、轉向器齒條,車輪總成及車身組成。各剛體之問的連接關系如下:減震器上端與車身的連接因為只有3個自由度,故簡化為球鉸A,轉向節總成與減震器上體用圓柱鉸B約束,只能沿軸線移動和轉動,下擺臂一端通過轉動鉸F和G與車身相連(其中一個為虛約束),另一端通過球鉸E與轉向節總成相連,轉向橫拉桿一端通過球鉸c與轉向節總成相連,另一端通過球鉸H與轉向齒條相連,運動分析時,轉向齒條通過固定副I與車身相連,車輪總成和轉向節總成也通過固定副D相連,車身相對地面不動 。由于運動學無需考慮受力問題,因此不考慮減震器的阻尼和彈簧的剛度。建成的麥弗遜前懸架模型如圖 2.2所示:
1.2 確定懸架運動特性參數
雖然麥弗遜式獨立懸架具有結構簡單、維修方便等眾多優點,但是由于主銷軸線位于減震器上支點和下擺臂外支點的連線上。因此,當懸架變形時,主銷軸線也隨之改變,車輪的定位參數前束角(Toe Angle)、車輪外傾角(Camber Angle)、主銷后傾角(Caster Angle)、主銷內傾角(Kingpin Inclination Angle) 及車輪轉向角(Steer Angle)也都會相應改變,且變化量可能很大,從而會導致車輪嚴重的磨損,出現不足轉向或過度轉向,并且可能使汽車的穩態響應特性以及直線行駛的穩定性變差。
因此,對麥弗遜懸架進行優化,就必須使以上五個運動特性參數在懸架變形的時候,其變化量盡可能減小。
1.3 仿真分析
本文針對兩側車輪同向跳動進行動力學仿真分析。在本次仿真分析中,將建立一個虛擬激振臺,設置上下激振位移為50ram,得到懸架左右車輪同步上下跳動過程中主要性能參數的變化規律。仿真步數設為100步,車輪跳動行程為-50~50mm。進行仿真后,可以得到各種特性參數仿真曲線:
(1)外傾角
由圖2.3可以看出外傾角變化曲線, 變化范圍為- 1.69°~0.325°/50mm。為防止車輪出現過大的不足轉向或過度轉向趨勢, 一般希望車輪從滿載位置起上下跳動40mm 的范圍內,車輪外傾角變化在1 度左右。故此懸架模型需要優化,使得外傾角特性盡量接近期望值。
(2)前束角
前束角變化的較理想特性值為:前輪上跳時,為0~0.5 °/50mm,圖2.4中前輪上跳時的變化范圍為-1.2°~2.0° /50mm,不滿足設計要求,有待優化。
(3)主銷后傾角
一般認為合理的主銷后傾角為2°~3°。圖2.5 中,主銷后傾角變化曲線,變化范圍在5.4°附近,過大,需要優化。
(4)主銷內傾角
圖2.6中的主銷內傾角變化范圍為9°~11.3°,偏大。為了減小轉向時車輪與地面的滑動,減緩輪胎磨損,主銷內傾角的變化范圍有待優化。
(5)車輪跳動產生的轉向角
由于車輪跳動產生的轉向角影響汽車的操縱穩定性,而且會加劇輪胎的磨損,所以一般要求將該轉角控制在一個較小的范圍內。
車輪跳動產生的轉向角:圖2.7 為轉角變化曲線,左、右車輪變化相反。
2、運行試驗及懸架優化
2.1 運行試驗
(1)首先,在ADAMS/Car模塊中建立麥弗遜懸架總成,并且進行兩側車輪同向跳動的仿真,步數仍然為100,車輪上下跳動行程仍為50mm。建立麥弗遜懸架總成如圖3.1:
(2)在ADAMS/Car中導入MSC.ADAMS/Insight 模塊,運行實驗,對車輪定位參數中的某項或是多項進行優化,使定位參數達到一個理想值。通過試驗,對麥弗遜懸架的下搖臂前點( lca_front) 、后點( lca_ rear) , 轉向拉桿內點( tierod_inner) 、外點( tierod _outer) , 下搖臂球頭銷( lca_outer) 等五個硬點的15 個坐標值( 每個點有X、Y、Z三個方向坐標) 進行分析,并且得出這些硬點的坐標值分別對不同的懸架運動特性參數是否有影響以及影響程度如何。設定每個坐標值的變動范圍在- 20mm~20mm 之間。
(3)運行試驗,仿真結束后,返回ADAMS/Insight查看結果。
(4)擬合結果,并選擇統計特性評價擬合結果。
(5)響應值的獲得。把擬合結果發布為HTML,用IE瀏覽器打開,可以改變設計因素的值,得到當前的響應值。
在多次試驗之后,得出各硬點對各個不同懸架特性參數的影響,列出影響較明顯的硬點如表3.1所示。
我們可以根據前面對擬合結果進行分析后得出的規律,對各個特性參數影響較明顯的硬點坐標進行調整。即:影響量Effect%為正時,減小坐標數值,影響量Effect%為負時,增大相應的坐標數值。當某一個坐標對兩個以上的特性參數有影響,并且影響趨勢相反時,則看對哪個特性參數的影響更大,則按對哪個特性參數的趨勢進行調整。

表3.1 硬點參數與懸架參數關系
2.2 優化懸架
根據表3.1可以比較出影響比較的大的一些參數,并對
它們進行調整如下表3.2所示。
按照表3.2調整這些硬點參數后,便得到了優化后的懸架硬點值,從而得到修改后的模型,并對此模型進行仿真分析,可以得到優化后的特性曲線與原來的特性曲線的對比圖(具體將在3.3節中詳細分析)。
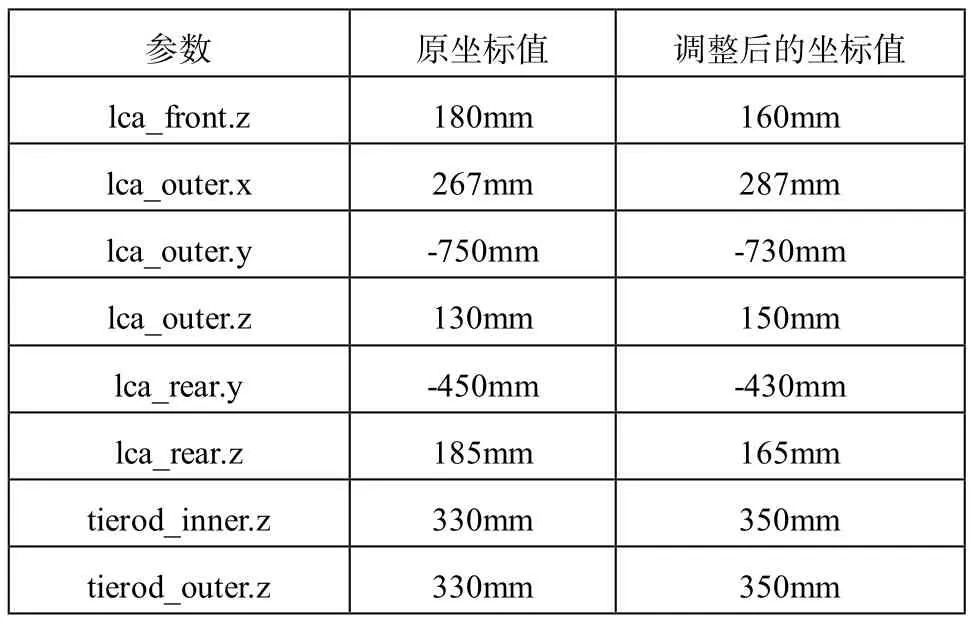
表3.2 硬點參數改動表
2.3 優化后懸架性能的改善
(1)車輪外傾角優化前后對比。
從圖3.2可以看出,優化后車輪外傾角的變化范圍是-1.1°~-0.38°/50mm,比優化前的范圍- 1.69°~0.325°/50mm要小。表明懸架性能得到改善。
(2)車輪前束角優化前后對比。
如圖3.3所示,優化前,前束角的變化為-1.4°~2.2°/50mm,而優化后的變化范圍大約為0°~1°/50mm,已經得到改善。
(3)主銷后傾角優化前后對比。
從圖3.4中得出,優化前主銷后傾角在5.5°附近,而優化后,主銷后傾角的變化范圍在3°左右,大大小于優化前的變化范圍,而且基本滿足主銷后傾角要求在2°~3°的設計要求。
(4)主銷內傾角優化前后對比。
從圖3.5中看出,優化前,主銷內傾角的范圍在9°~11.3°,而優化后范圍為7.6°~8.25°,平均值比原先小了2°左右,這將減小轉向時車輪與地面的滑動,減緩輪胎磨損。
(5)車輪跳動產生的轉向角優化前后對比。
一般要求將車輪跳動產生的轉向角控制在一定的范圍內,否則不僅影響汽車的操縱穩定性,而且會加劇輪胎的磨損。優化前的轉向角范圍偏大。從圖3.6中可以看出優化后轉向角范圍比優化前明顯減小,所以車輪跳動產生的轉向角得到了改善,從而提高了汽車的操縱穩定性,減小了輪胎的磨損。
從以上優化結果可以看出,優化時選擇的8個坐標點的改變,使得車輪的四個定位參數及車輪跳動產生的轉向角得到了不同程度的改善,懸架性能得到了優化。
3、結束語
本文通過應用ADAMS軟件對麥弗遜懸架進行了動力學仿真和優化,解決了車輪跳動過程中各定位參數變化過大及不符合設計要求范圍等問題,使得輪胎磨損、不足轉向或過度轉向等問題得到了改觀,提高了車輛直線行駛的穩定性。同時也說明了下搖臂(后點lca_rear)對車輪外傾角有較明顯影響;轉向橫拉桿(內點tierod_inner)對前輪前束角有較大影響;下搖臂球頭銷( lca_ outer)對主銷后傾角和前束角以及主銷內傾角都有較明顯影響。在開發新車或在原來已有的車型基礎上進行改進設計時,在實際樣件、樣車制造出來之前,完全可以利用ADAMS/CAR提供的動態仿真環境,對懸架甚至整車的一些主要性能進行事先預測、評估,這樣可以大大地縮短產品的開發周期。
[1] 陳家瑞.汽車構造(下冊)[M].北京:機械工業出版社,2000,167-246.
[2] 饒劍. 基于ADAMS 的懸架系統動力學仿真分析與優化設計:[D].武漢:武漢理工大學汽車學院,2005,1-11.
[3] 喬明俠.基于多體動力學的汽車平順性仿真分析及懸架參數優化:[D].合肥:合肥工業大學,2005,1-5.
[4] 陸丹,湯靖,王國林. 基于ADAMS的麥弗遜前懸架優化設計[J].中國制造業信息化,2003,33(8):106.
Dynamic Simulation and Optimization of McPherson Suspension based on ADAMS
Tong Ningjuan, Xiao Yunna, Hui Peng, Wang Fenggang
(Shaanxi Handeaxle Co., Ltd., Shaanxi Xi’an 710201)
This paper is based on Multi-rigid Body System dynamics and establish a Multi-rigid Body model of McPherson Suspension with ADAMS/Car. Study five kinematic parameters of suspension including Toe Angle,Camber Angle, Caster Angle,Kingpin Inclination Angle, Steer Angle after simulating and analysing the suspension model whose two wheels bump and rebound to the same direction.Besides,in order to improve the performaces of the suspension,the five kinematic parameters are optimized with ADAMS/Insight from ADAMS/Car.Finally, compare the optimized curves of kinematic parameters with the original curves to gain better kinematic parameters.Then suspension has been optimized.
ADAMS; McPherson Suspension; Multi-rigid Body System Dynamics; Simulation and Optimization
U461.1
A
1671-7988(2014)11-35-05
童寧娟,就職于陜西漢德車橋有限公司。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45