直接轉矩控制下磁鏈和轉矩的觀測研究
2014-02-08 07:41:44張莉萍李燕濤
中國傳媒科技 2014年10期
文|張莉萍 李燕濤
直接轉矩控制(Direct Torque Control, DTC)在定子靜止坐標系下,以空間矢量概念,對定子磁鏈定向,通過檢測電壓和定子電流,經3/2變換直接計算出電機的磁鏈和轉矩,并利用兩個滯環比較器,直接實現對定子磁鏈和轉矩的解耦控制 [1]。
三相電流、電壓采樣信號由3/2坐標轉換得到兩相電壓、電流[2,3],經磁鏈電壓模型,確定定子磁鏈后,通過轉矩模型,即可觀測到定子磁鏈和轉矩。轉矩受給定負載的影響,負載的變化影響電流的大小幅值,電流和電壓矢量共同作用于磁鏈,影響著磁鏈的大小和方向。磁鏈的變化改變磁鏈電壓矢量。電壓空間矢量控制定子磁鏈的旋轉速度和電磁轉矩。
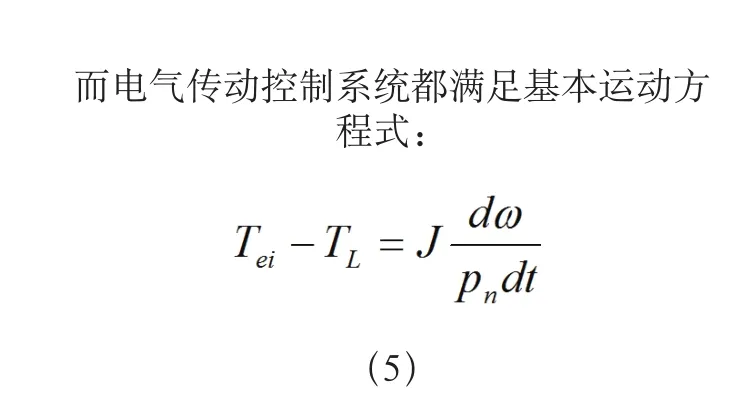
基本原理
電壓型磁鏈觀測器是基于異步電機電壓方程得到的。三相電流、電壓采樣信號經過3/2坐標變換得到isα、isβ和usα、usβ:

利用式(5)和式(4)可知,電磁轉矩要克服負載轉矩,負載的變化帶動電磁轉矩幅值的變化,負載越大,電磁轉矩的幅值越大。如圖1所示:

圖1 不同的負載轉矩下相應的電磁轉矩
在同一轉速下,由式4,電磁轉矩的大小受負載的大小的影響,磁鏈的幅值是給定的,在一定的容差范圍內波動,當負載變大時,為了保持電磁轉矩的穩定,定子電流的幅值隨之增大。電流的大小,是根據電壓控制,施加正電壓矢量,電流是隨時間上升的,施加負電壓矢量,電流隨時間而降低,施加零電壓矢量,電流呈反方向運動。欲在同一周期內,增加定子電流的幅值,則定子電壓矢量應在保證磁鏈和轉矩穩定的前提下,相應減少定子電壓的切換次數越少,減少零電壓作用時間,增大工作電壓作用時間。
如式1,2所示,3/2變換將三相電流、電壓采樣變換得到isα、isβ和usα、usβ,由式(3),磁鏈的大小與電壓和電流有關,根據式1和式3,在電壓矢量的作用下,電流的大小,影響磁鏈變化的大小。 由式(3)(4)(5)可知,負載越大,定子電流的幅值越大,isα同一周期內的上升幅度變大,磁鏈隨電流變化的幅度也就越大,在相同時間內,定子電壓的切換次數越少,零電壓作用次數越少,工作電壓作用時間越長,磁鏈隨工作電壓作用下降的時間變長,如圖2所示,負載(b)TL2>TL1(a)。圖3所示為轉矩隨負載的變化,轉矩受工作電壓影響上升時間增加。
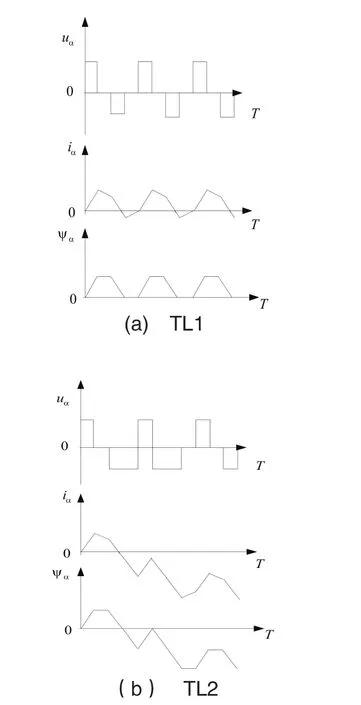
圖2 不同負載下,磁鏈電流隨電壓的變化
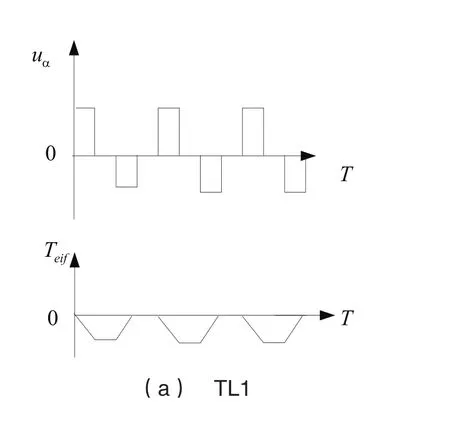
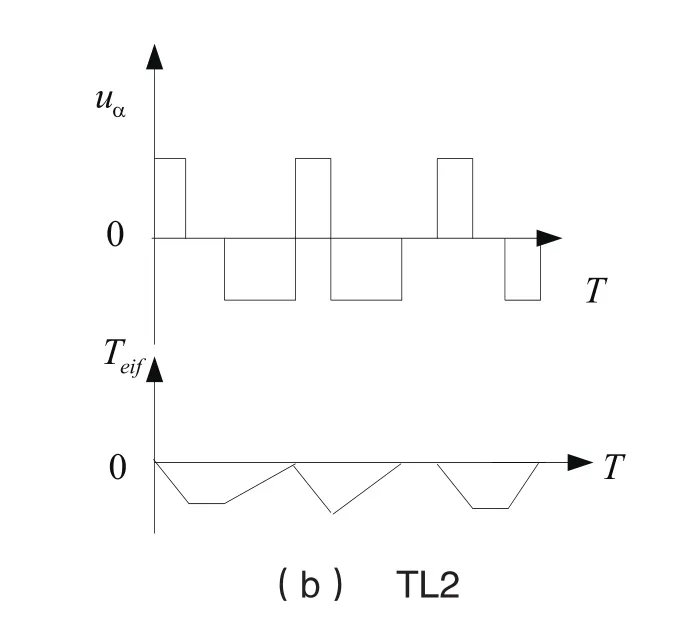
圖3 轉矩隨負載的變化
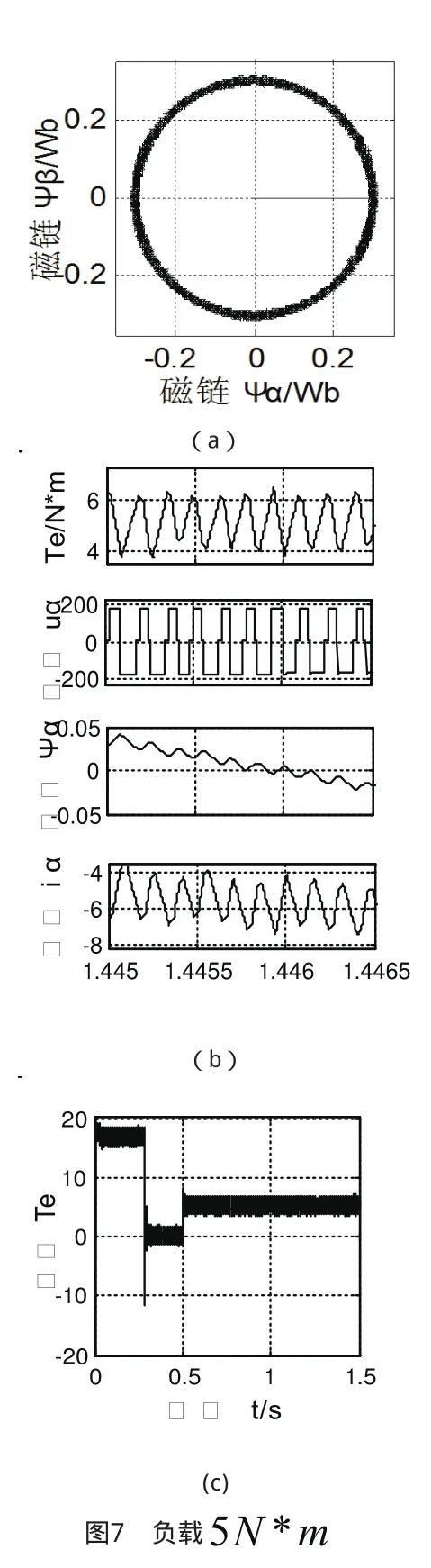
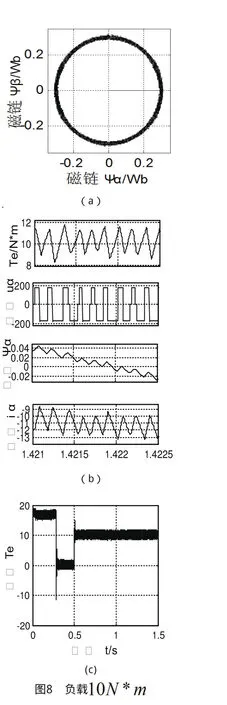
仿真結果

結論
本文根據直接轉矩的控制原理,利用MATLAB構建直接轉矩仿真系統,在給定轉速不變時,給系統施加不同的負載,得出磁鏈和轉矩隨負載的變化。給定轉速不變時,當負載增大,轉矩增大,定子電壓矢量的切換次數減少,非零電壓矢量時間增多,磁鏈下降時間變長,轉矩上升時間增加。通過對直接轉矩進行研究,對觀測轉矩和磁鏈進行分析,驗證了論據,有利于磁鏈觀測的研究。
