基于LabVIEW與DSP的電機調速系統在光聲圖像采集中應用
2014-01-31 09:02:32白曉淞周俊趙
微特電機 2014年4期
鄭 勝,白曉淞,周俊趙
(1.桂林電子科技大學,桂林541004;2.中科院深圳先進技術研究院醫工所,深圳518052)
0 引 言
光聲成像是國際上新發展的一種無創在體生物醫學成像技術,具有高分辨成像能力和成像深度,表現出巨大的應用前景,并得到迅速發展[1]。而光聲成像系統的成像質量對拖動電機和掃描電機控制有著較高的要求,它不僅要求多模成像系統掃描圖像電機速度保持穩定,而且其上位機程序要集成到上位機圖像采集與數據處理主系統中去,并要實現圖像采集的速度可調。基于此,本文設計了基于Lab-VIEW與DSP的電機調速系統,采用串口通信的方式,實現上位機LabVIEW與控制器DSPTMS320F2812的通信,DSP通過控制算法實現電機速度的穩定控制。
1 系統硬件構成及通信設計
1.1 硬件構成
基于LabVIEW與DSP的電機調速系統主要分為三部分,第一部分是基于LabVIEW的上位機,用來發送和接收速度值;第二部分是伺服控制器DSP,主要功能是接收RS232串口速度指令,采集轉速、電流信號采用控制算法加以實現;第三部分為電機驅動模塊、光電編碼器、電機等。這里電機為富士GYS201D5-RC2三相交流電機,光電編碼器為2500線的多摩川增量式光電編碼器TS2604N321E64,控制芯片選用DSP TMS320F2812,晶振為30 MHz,通過鎖相環倍頻為150 MHz。其原理圖如圖1所示。
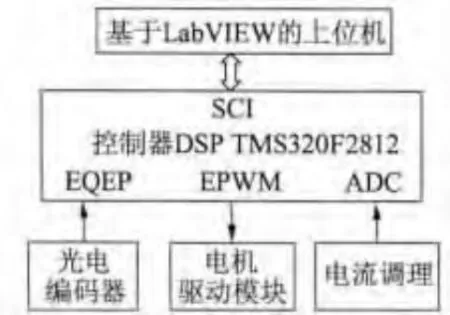
圖1 系統硬件結構圖
1.2 通信方式設計
通信方式采用SCI串行口通信,其參數設置如下:波特率為19 200 b/s,8位數據位和1位停止位,無奇偶校驗位,上位機LabVIEW與DSP通過RS232串口半雙工通信來完成接收和發送數據。DSP上電后等待激光器的初始化,當激光器完成初始化并激發換能器后,基于LabVIEW的上位機程序發送速度命令,DSP收到速度命令后驅動拖動電機和掃描電機以恒定的轉速帶動光纖和掃描探頭旋轉,當完成了規定掃描范圍的n幀圖像數據采集后,LabVIEW自動發出停止命令,DSP通過反接制動控制電機停止掃描。DSP作為控制器實現對上位機系統速度值的接收和對電機轉速的穩定控制。
2 基于LabVIEW的上位機程序
虛擬儀器是一種基于計算機軟件的儀器系統,廣泛應用于生物醫學工程、自動化儀器儀表、機器人視覺、工業控制與檢測等。虛擬儀器技術在醫療裝備中主要的應用有醫學信號的數據采集和分析、醫療裝備系統的控制及遠程醫療系統等[2]。VISA作為虛擬儀器編程的標準I/O的API,是LabVIEW實現程序通信的底層模塊,其獨立于操作系統,可根據使用儀器的類型來調用相應的程序,無需學習各種儀器的通信協議,是一個用來在串口通信設備、VXI或PXI設備、USB設備、GPIB設備以及其他基于計算機設備間通信的函數庫[3]。上位機串口通信部分程序如圖2所示,這里串口通信程序總體架構是基于生產者與消費者循環來實現的,通過對VISA的功能模塊進行配置和調用來完成。首先是創建用戶注冊事件和對串口的初始化配置等,配置參數要與DSP的SCI串口初始化的程序時的設置一致;其次在while中循環的讀取和寫入速度值,并產生相應動態的注冊事件來停止或重新發送數據。
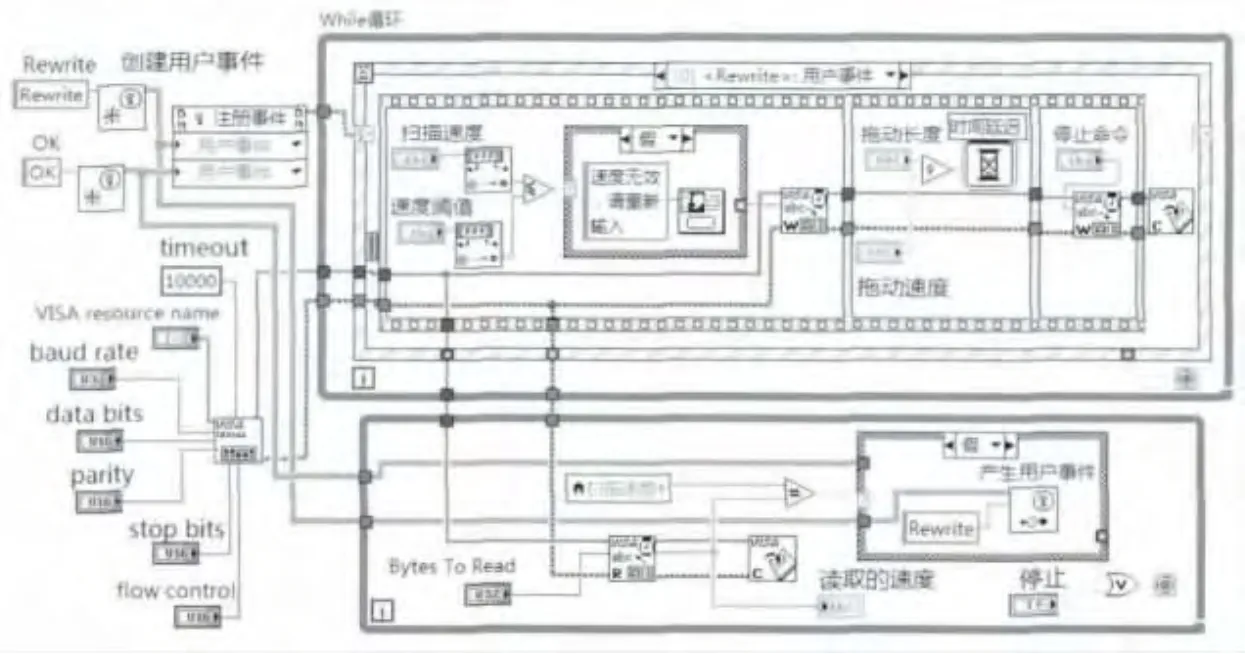
圖2 上位機通信部分程序面板
為避免發送出錯,采用注冊動態事件方式檢查發送的數據幀與DSP回傳的數據幀是否一致,一致則認為發送成功,超時則停止,其他情況則采用默認注冊事件方式重新發送,這樣保證數據傳輸的可靠性與準確性。
3 基于DSP的控制器設計
控制器C程序在CCS環境下編寫,主要包括主程序、參數初始化子程序(時鐘、看門狗、SCI串口、AD模塊、事件管理器模塊、GPIO口定義模塊、EQEP模塊)、串口中斷服務及控制算法的實現程序等。
1)數據的接收和發送。在標準SCI模式下通過中斷方式來接收和發送數據,分別為數據接收區和數據發送區,用來存放LabVIEW發送來的數據幀和單片機要發送給LabVIEW的響應數據幀[4]。當接收中斷發生時,DSP將串口發送來的控制值通過中斷函數SCIRXINTA_ISR裝入數據接收區,由于Lab-VIEW從串口發送過來的數據值為ASCII字符形式,因此轉換為控制的速度值時一定要轉換為無符號的整型數,每一個ASCII碼字符與其整型數相差48。當進入發送中斷單片機將發送區的數據通過SCITXINTA_ISR中斷函數發送給上位機并判斷發送的控制值是否正確,不正確則上位機重新發送。
2)由于在圖像采集的電機調速過程中要求電機調速迅速、平滑,因此速度跟隨要越快越好。此外,由于負載變化和系統受到擾動時,系統的開環速度控制并不能消除速度值與期望值的偏差,這樣就會導致圖像采集的線數出現偏差或是不均勻,因此,系統采用速度閉環控制以提高系統的快速性、穩定性和抗干擾的能力,其中速度給定值由上位機Lab-VIEW發送并由DSP串口接收,速度測量值采用M法測速,即由光電編碼器采集的脈沖信號送到DSP專門的EQEP口并與定時器值結合計算得來。雖然系統的控制目的是對電機轉速的穩定精確控制,但是僅對速度的控制是不能達到掃描電機的精確速度控制和快速啟停的,電機的控制本質就是轉矩的控制,因此對轉矩的控制顯得尤為必要,而轉矩在電機電流不超過其額定值時,轉矩與電機的電流幾乎成正比,所以要控制好轉矩就是要控制好電機的電流。這樣通過對電樞電流的閉環控制不僅可以減少諧波成分和轉矩脈動,而且在快速啟停時,避免了速度調節器出現飽和,使系統獲得最大的加減速,此外通過電流飽和閾值限制避免了過載電流的出現,具有良好的靜態特性,而且電流環是內環,其閉環控制要比速度控制快得多,通過對電流的閉環控制明顯提高了系統的動態跟隨性能和抗干擾能力[5],所以系統采用的是雙閉環控制,串聯連接,內為電流環,外為速度環,這樣就可以實現電機的在線調控。其控制算法框圖如圖3所示。
3)主程序完成初始后,等待中斷發生,當中斷發生時,DSP TMS320F2812作為控制核心,接收到上位機發送的速度值和采集相電流值和計算實際轉速值,通過PI控制算法,采用電壓空間矢量SVPWM[6]技術,經高速光耦隔離后來控制三相電壓源逆變器功率開關管的開關狀態和順序組合以及開關時間的長短,經橋式模塊驅動電機實現調速控制。伺服電機的電流通過AD采樣送入DSP的IO口,轉速信號則通過EQEP口反饋給DSP,形成對電機的雙閉環PI控制。系統電磁轉矩穩定,母線電壓利用率高,易于數字化控制;上位機通過USB轉RS-232串口發送調速指令,完成對電機速度的在線調控,其程序流程圖如圖4所示。
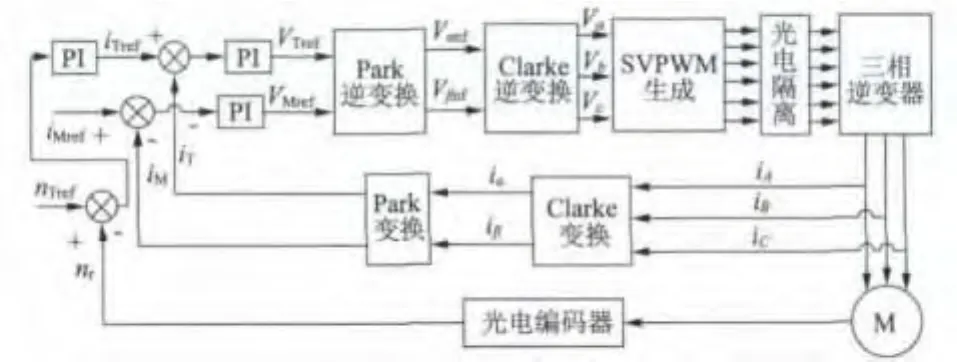
圖3 控制算法框圖
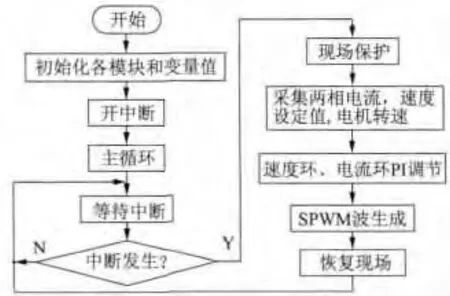
圖4 程序流程圖
4 實 驗
硬件連接好后,當上位機發出控制速度1 800 r/min時,電機轉速運行達到1 800 r/min,運行平穩,當完成規定的掃描長度后,上位機自動發出停止命令,電機也能迅速停止,掃描完成。當轉速為1 800 r/min時,用邏輯分析儀測得同一橋臂上下兩個開關管的PWM驅動波形,如圖5所示。
從示波器中觀察單相橋臂的電壓波形和電流波形如圖6所示。波形1為電壓波形,波形2為電流波形,近似為周期正弦信號,諧波成分小,這與理論相吻合,說明整個系統已達到了預期的效果,具有良好的動靜態性能。
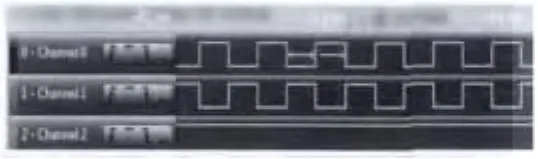
圖5 同一橋臂的PWM驅動波形
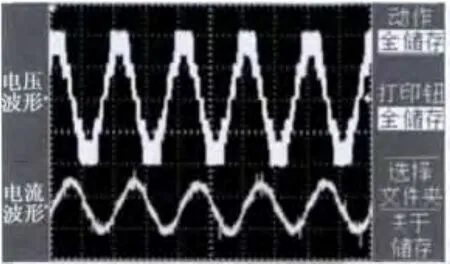
圖6 單相橋臂的電壓波形和電流波形(截圖)
5 結 語
本文利用LabVIEW強大的串口通信功能和DSP優越的電機控制性能,完成了對光聲圖像采集系統中掃描電機速度的快速穩定精確控制。運行結果顯示在線調速時間短,速度控制穩定準確,具有良好的操作性能和控制性能,為成像系統提供了一種利用LabVIEW控制電機掃描速度的方法,實驗證明其運行穩定可靠,具有一定的應用價值。
[1]陶超,劉曉峻.生物醫學光聲成像的研究進展[J].應用聲學,2012,31(6):8-9.
[2]饒程,熊興良.虛擬儀器技術及其在醫學信號采集中的應用[J].醫療衛生裝備,2004(3):12-15.
[3]朱建平,呂春峰.基于LabVIEW的單片機串口通信實現[J].機械工程與自動化,2008.
[4]顧衛鋼.手把手教你學 DSP——基于 TMS320X281X[M].北京:北京航空航天大學出版社,2011.
[5]趙立新,丁筱玲,劉雙喜.轉速、轉子電流雙閉環控制變頻調速器[J].農業機械學報,2002,33(2):135.
[6]周有為,劉和平,楊利輝.基于TMS320F2812的SVPWM的研究[J].電氣傳動,2005,24(2):98-101.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
人大建設(2019年12期)2019-05-21 02:55:44
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中山大學法律評論(2018年1期)2018-03-30 01:21:00
瞭望東方周刊(2017年42期)2017-12-05 18:49:38
家庭影院技術(2017年9期)2017-09-26 03:41:45
環球時報(2017-03-30)2017-03-30 06:44:45