拉桿式線位移傳感器校準系統
2014-01-29 08:35:28中航工業沈陽飛機工業集團有限公司陶松威
電子世界 2014年18期
中航工業沈陽飛機工業(集團)有限公司 陶松威
拉桿式線位移傳感器校準系統
中航工業沈陽飛機工業(集團)有限公司 陶松威
針對現有的拉桿式線位移傳感器校準速度慢、周期長、工作量大、精度低等弊端,研制出一種基于光電檢測技術的線位移傳感器自動校準系統。該系統采用伺服電機驅動精密直線運動機構,由光柵傳感器實時檢測運動滑座的位移,作為線位移傳感器的標準位移輸入。同時,校準系統檢測線位移傳感器的電壓輸出,根據這兩者間的輸入輸出關系確定拉桿式線位移傳感器的靈敏度、線性度、重復度等特性參數。整個校準過程由計算機控制,從而實現了對拉桿式線位移傳感器的自動校準。分析結果表明,該校準系統能夠解決工業現場拉桿式線位移傳感器校準問題,實現了校準過程的自動化、快速化與高精度。
拉桿式線位移傳感器;校準系統;光柵傳感器;不確定度分析
1.引言
拉桿式線位移傳感器是通過拉桿感受長度尺寸變化并轉換成可用輸出信號的器件,它是線位移傳感器中最常見的一種,可用于測量位移、距離、位置和應變量等長度尺寸。拉桿式線位移傳感器在機械制造業和工業自動檢測領域中占有重要地位,廣泛應用于電力、水利、建筑、航空航天、公路鐵路交通等多個行業的測試任務。為保證傳感器使用的可靠性和測量精度,根據國標規定需要對靈敏度、基本誤差、線性度、回程誤差和重復性等主要計量特性做定期校準[1,2]。
目前,國內外常用的線位移傳感器校準方法是通過萬工顯[3]、測長機[4]、激光干涉儀[5,6]等儀器設備提供標準位移,由線位移傳感器對該標準位移量進行檢測,得到線位移傳感器的輸入-輸出關系,進而實現傳感器的校準。激光干涉儀雖具有較高的測量精度,但校準機構復雜、成本高,且對測量環境的要求高,主要用于精度要求特別高的線位移傳感器校準。采用萬工顯、測長機等設備進行校準,校準過程以手工操作為主,校準精度和效率都不高。并且,現有研究成果主要側重于理論和實驗方法的研究,未能形成標準化的設備,而市場上目前也沒有合適的專用校準系統。為此,本文提出一種基于光柵傳感器的拉桿式線位移傳感器自動快速校準方法,并研制出校準系統,實現了拉桿式線位移傳感器的高精度自動校準。
2.校準系統工作原理
本系統采用相對校準法,以高精度光柵傳感器測量結果作為標準位移,用NI數據采集卡采集光柵傳感器測得的標準位移量和線位移傳感器的電壓輸出量,以此來校準線位移傳感器。如圖1所示,自動校準系統主要由機械部分、光柵傳感器、數據采集模塊、運動控制模塊以及計算機組成。
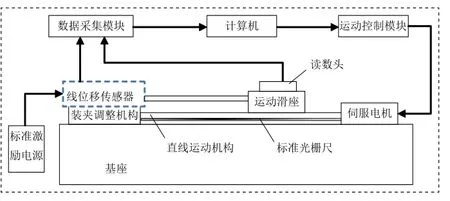
圖1 拉桿式線位移傳感器校準系統組成框圖
校準時,首先裝夾好線位移傳感器及其連接組件,然后伺服電機驅動運動滑座在直線運動機構上沿導軌移動,運動過程全部由計算機控制。分別安裝在直線運動機構上的光柵尺和安裝在滑座上的讀數裝置組成光電檢測系統,實時測量運動滑座在直線運動機構上的位移,并結合拉桿式線位移傳感器的讀數,可得到線位移傳感器的靈敏度、線性度、回程誤差等特性參數,從而實現對拉桿式線位移傳感器的自動校準。校準系統量程為0~500mm,分辨力可達1μm。
2.1 機械結構設計
校準系統機械部分實現的功能主要包括運動滑座的直線位移傳動、線位移傳感器的裝夾及其位置調整,以及線位移傳感器與運動滑座的固定連接。
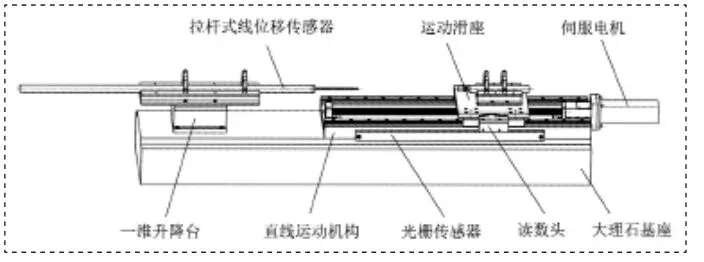
圖2 校準系統機械結構組成圖
如圖2所示,由于被校準的拉桿式線位移傳感器為圓柱形外形,可采用V型塊裝夾。傳感器拉桿經安裝在運動滑座上的連接組件與滑座相連,并通過一維升降臺調整傳感器安裝高度,使得拉桿與連接組件滿足對中性要求。校準時,伺服電機驅動滾珠絲杠,帶動運動滑座沿導軌做正反行程的直線位移。光柵傳感器及其讀數頭分別安裝在直線運動機構的導軌側面和運動滑座上,可實時測量運動滑座的直線位移,作為線位移傳感器的標準位移輸入。
2.2 傳感器信號采集
校準系統使用美國NI公司USB-6229DAQ卡進行線位移傳感器和光柵傳感器的信號采集。其中被校準的線位移傳感器輸出的是模擬電壓信號,范圍為-10V~+10V。光柵傳感器輸出兩路相位差為90°的TTL方波信號和一路參考信號,采集卡中有專門的計數器用來處理這類信號。在工作時,分別將兩路增量信號和一路參考信號與計數器的Source,AUX和GATE引腳相連。計數器在工作時,一共有三種模式可供選擇,分別是X1、X2和X4編碼模式,即一倍頻、兩倍頻和四倍頻計數。
校準系統采集的信號為低頻信號,對信號采集卡的采樣頻率要求并不高,采用大于1kHz即可。采集卡通過USB接口與計算機進行通訊,USB總線供電方式可以提供3.5V的直流電壓,能夠滿足信號驅動和采集的需要。
2.3 運動與測量控制
校準系統設計了三種控制模式,可通過計算機直接選取。第一種是等間隔采點模式,即在整個行程中,等間距采集11個校準點(包括上、下限)。NI數據采集卡按順序分別采集線位移傳感器輸出的電壓值U與光柵傳感器輸出的位移量L。以正、反兩個行程為一個測量循環,共測三個循環。測量完成后,計算機自動將測量數據保存在數據庫中并計算出校準結果,繪制出傳感器特性曲線。第二種為隨機采點模式,即在整個行程中,系統隨機采集11個校準點,然后按第一種模式的后續操作進行校準。第三種為自定義采點模式,即由校準人員在校準量程范圍內任意指定一系列校準點,記錄這些校準點處線位移傳感器的輸出電壓值U與光柵傳感器輸出位移量L,再由系統計算得出線位移傳感器特性曲線。
3.校準系統不確定度分析
使系統校準結果產生不確定度的主要因素包括:阿貝誤差引入的不確定度分量、測量重復性引入的不確定度分量、光柵傳感器誤差引入的不確定度分量、線位移傳感器安裝誤差引入的不確定度分量、采集卡信號采集引入的不確定度分量等[7-9]。
3.1 阿貝誤差引入的不確定度分量u1
由于光柵傳感器與被校準的線位移傳感器所測量的位移量不處在同一直線上,直線導軌存在的直線度誤差會導致校準過程中產生阿貝誤差。在校準量程范圍內,運動機構中導軌的最大直線度誤差為15μm,光柵傳感器標尺與線位移傳感器拉桿中心線之間的有效距離為90mm,由此計算出的兩者之間的最大夾角為 ,因此阿貝誤差引入的不確定度分量為:

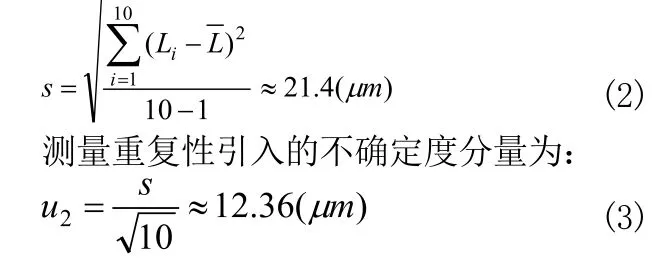
3.2 測量重復性引入的不確定度分量u2
測量重復性引入的不確定度分量采用A類評估法。對線位移傳感器在200mm點處重復測量10次,得到的傳感器輸出電壓(單位:V)分別為4.0001、4.0005、3.9998、4.0003、3.9994、3.9999、4.0001、4.0004、3.9996、4.0008,對應的位移量示值(單位:mm)分別為200.005、200.025、199.990、200.015、199.980、199.995、200.005、200.020、199.970、200.040,算術平均值mm。由貝塞爾公式計算得到單次測量標準差s為:
3.3 光柵傳感器誤差引入的不確定度分量u3
本校準系統選用的是海德漢LS477增量式直線光柵傳感器,其測量不確定度e3為±3μm。令該誤差服從正態分布,k3取3,由此產生的不確定度分量為:

3.4 線位移傳感器安裝誤差引入的不確定度分量u4
線位移傳感器的安裝誤差將導致拉桿與滑座的運動方向不一致,兩者存在夾角θ,從而產生線位移傳感器的測量誤差,表現為余弦誤差 e4=L(1?cosθ)。為此,校準系統在線位移傳感器安裝時采用千分表校核,確保夾角θ值很小,經計算此項誤差引起的不確定度分量可忽略不計。
3.5 采集卡信號采集誤差引入的不確定度分量u5
此項誤差主要來源于采集卡在采集線位移傳感器輸出電壓值的量化誤差,USB-6229DAQ數據采集卡的采集精度為16bits。由于線位移傳感器輸出電壓值為0~10V,對應的位移量為0~500mm。按最大量化誤差計算出的不確定度分量為:

3.6 合成標準不確定度uc
假設上述計算的各不確定度分量彼此相互獨立,則合成的標準不確定度為:

3.7 擴展不確定度U
校準系統擴展不確定度:

4.結論
本文針對現有的拉桿式線位移傳感器校準周期長、成本高的缺點,提出了一種基于光柵傳感器的校準方法,并在此基礎上研制出適用于拉桿式線位移傳感器的高精度自動校準系統。
該系統校準過程中的直線運動和位移測量完全由計算機控制,校準不確定度為34.2μm,可實現0~500mm量程拉桿式線位移傳感器的高精度自動校準。本校準系統降低了拉桿式線位移傳感器的檢定成本,提高了傳感器的使用效率,同時也為其它類型線位移傳感器的校準提供了借鑒。
[1]JJF 1904-2002.測量儀器特性評定[S].
[2]JJF 1305-2011.線位移傳感器校準規范[S].
[3]吳永紅.線位移傳感器檢定方法[J].中國測試技術,2003(3):40-41.
[4]伍沛剛.利用測長機校準拉線式位移傳感器的方法[J].工具技術,2009(1):108.
[5]朱目成,葉子郁,王雅萍.差動位移傳感器的激光干涉法自動檢定[J].儀表技術,2004(5):73-75.
[6]唐志鋒,何小妹,王曉梅.位移傳感器校準技術研究[J].計測技術,2011,31(6):15-17.
[7]韓清華,王海英,董延軍,等.線位移傳感器校準的一種新裝置[J].新技術新儀器,2008,28(5):20-22.
[8]崔健軍.線位移傳感器校準及不確定度分析[J].計量學報,2010,31(6A):1-5.
[9]JJF 1059-1999.測量不確定度評定與表示[S].
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45