無鐵心永磁直線同步電機電流魯棒控制
2014-01-27 05:56:32孫宜標
電氣技術 2014年5期
孫宜標 劉 玲
(沈陽工業大學電氣工程學院,沈陽 110870)
無鐵心永磁直線同步電機電流魯棒控制
孫宜標 劉 玲
(沈陽工業大學電氣工程學院,沈陽 110870)
針對無鐵心永磁直線同步電機(ILPMSM)存在d-q軸耦合效應、易受參數不確定性的影響,為實現系統的高性能控制,提出了一個帶有延遲補償的魯棒控制器。該控制器由一個一階參考模型的逆模型和一個積分項組成,不需要結合其他控制算法且不要求系統參數精確。采用系統傳輸延遲的逆模型來補償系統時延的影響。與常規 PI控制器相比,魯棒控制器能很好地抑制ILPMSM 系統的不確定性干擾,并對系統的傳輸延遲進行可靠補償。仿真結果表明該方案有效地減少系統響應的超調,使系統具有良好的動態性能。
無鐵心永磁直線同步電機;延遲補償;魯棒控制器;不確定性干擾
目前,將無鐵心永磁直線同步電機控制系統用于高精度、短行程、高頻往復運動的特殊應用場合,如半導體光刻、PC板檢測和鉆孔、凸輪的切削加工等,可充分發揮其質量輕、響應快、精度高的特點[1]。而用于高速加工的執行元件和控制技術受到很多因素的限制,為滿足精密加工要求,研發高性能運動驅動器和伺服控制器是十分必要的[2]。
高速、高精無鐵心永磁直線同步電機(ILPMSM)驅動器對制造業越來越重要,在數控機床中的應用也越來越廣泛。ILPMSM的電樞繞組中沒有鐵心,不存在齒槽效應,產生的轉矩脈動小,比有鐵心永磁直線同步電機(PMLSM)實現更高的效率[3]。為了使永磁直線同步電機能在速度和位置控制方面達到完美的性能,最重要的是要控制好電樞電流,但是直線電機系統的電流控制性能會受到不確定的電流參數和反電動勢(EMF)的影響[4-5]。
本文針對ILPMSM系統中由于d-q軸耦合效應和模型不確定性等因素造成的不良影響,基于電流環的控制策略應簡單,系統響應快速、準確的思想,設計了帶有延遲補償的電流魯棒控制器。該控制器由一個一階參考模型的逆模型和一個積分項組成。為了補償系統傳輸延遲對系統造成的反應超調的影響,在電流魯棒控制器中加入了傳輸時延的逆模型。該控制器不需要結合其他控制算法且不要求系統參數精確。控制算法簡單可靠,能有效提高系統暫態響應速度和減小穩態誤差。
1 ILPMSM的數學模型
ILPMSM的d-q軸模型磁鏈方程[6]為
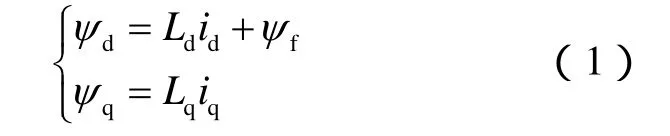
式中,ψd(ψq)為 d-(q-)軸磁鏈,Ld(Lq)是 d-(q-)軸電感,id(iq)為d-(q-)軸電流,ψf為定子永磁體產生的勵磁磁鏈。
ILPMSM的d-q軸模型電壓方程[7]為
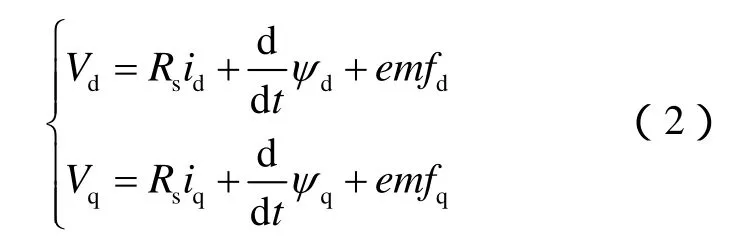
式中,Vd(Vq)為 d-(q-)軸電壓,Rs為動子電阻。emfd(emfd)是d-(q-)軸的反電動勢,其表達式[8]為
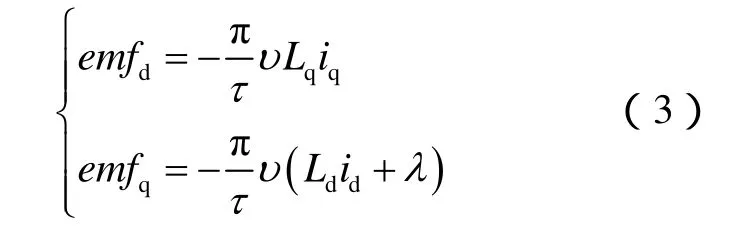
式中,τ表示極距,υ為ILPMSM動子的運動速度,λ是永磁體的磁鏈系數。
2 魯棒控制器設計
2.1 魯棒控制方案
一階被控對象P(s)可以表示為

式中,b和c是不確定的正常數,并且b≠c。
圖1表示的是被控制對象 P(s)的控制框圖,k為正常數,表示積分增益。P?( s)是設計的參考模型,表達式為

式中,a為正實數。
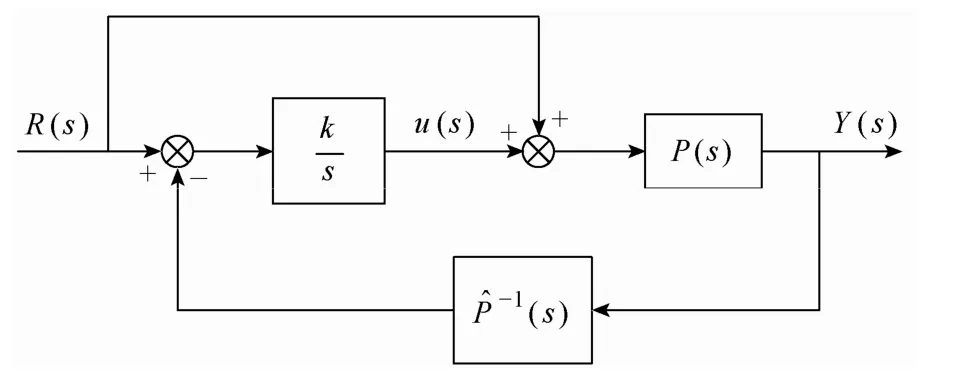
圖1 被控對象P(s)的控制框圖
在魯棒控制方案中,參考模型的階次必須與實際模型的階次相同[9]。由R(s)到Y(s)的閉環傳遞函數可以簡化為

式中,k>0,由 R(s)到 Y(s)的閉環傳遞函數是穩定的系統。
當R(s)是單位階躍輸入時,終值y(t)由下面的終值定理[10]得

從上式可以看出,控制策略使得被控閉環系統的直流增益為 1,系統穩態時的輸出等于輸入。進而說明,所提出的魯棒控制策略簡單,不需要結合其它的控制算法。將式(6)進行變換:
上式表明,當k越大,G(s)的響應越接近于P?( s)的響應,并且有:如果k足夠大,被控系統的響應與設計的參考模型基本一樣。
事實上,設計的參考模型P?( s)與實際模型 P(s)存在誤差。如圖2所示,將參考模型作為被控制對象,引入模型不確定性因子ρ。圖中,d為不確定性干擾。ρ可通過以下式子計算得出
控制器的補償項u(s)由下面式子給出


圖2 帶有干擾的被控對象P(s)的控制框圖
當k足夠大時,根據模型的不確定性,補償項u跟蹤不確定性干擾與參數不確定性的和。為了更清楚地看出魯棒控制器能有效減少模型不確定性對電機運動造成的不良影響,給出剩余不確定性υk:

上式表明,當設計值k越大,υu就越小,不確定性干擾就越小甚至消除,最終,系統的響應與參考模型近似。
2.2 ILPMSM系統電流控制的魯棒控制
根據式(2)和式(3)的拉氏變換式,可以得到如圖3所示的由電壓Vd(Vq)到電流id(iq)的開環控制框圖。υd′ (υq′)是 d-(q-)軸控制器的控制項,kPWM是 PWM 調制解調器的轉移因子。通過 kPWM,υd′ (υq′)轉化成d-(q-)軸上的電壓是 d-(q-)軸的電樞繞組電壓。
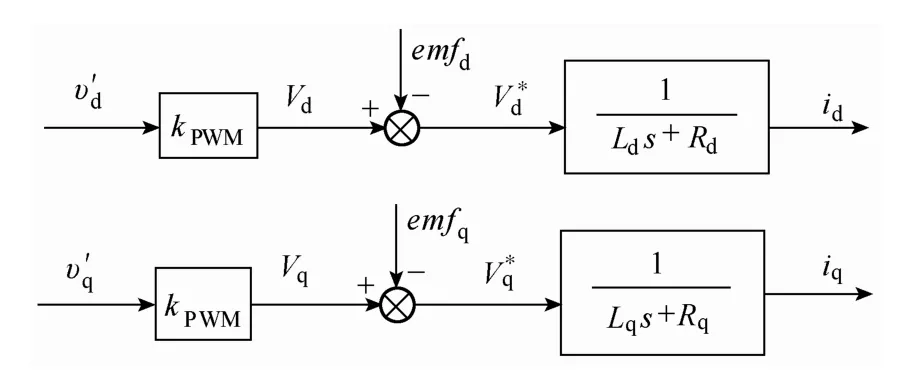
圖3 由電壓Vd(Vq)到電流id(iq)的開環控制框圖
提出的魯棒控制策略用來控制 ILPMSM 的電流,可以減少如圖4所示的d-q軸耦合效應和模型不確定性帶來的干擾。圖4是帶延遲補償的魯棒控制器的控制框圖。Ed(Eq)與反電動勢相關,表示因耦合效應產生的干擾。i*d(i*q)是給定的 d-(q-)軸電流指令;υd′ (υq′)是 d-(q-)軸控制器的控制項;ucd(ucq)是d-(q-)軸控制器的補償項;是設計的參考模型;軸的電流響應。是實際電流模型,可以寫為

在圖4中,e-Ls表示系統的傳輸延遲,L是系統的延遲時間,L=0.00005,該系統的傳輸延遲會影響系統性能和造成系統反應超調[11]。因此,在魯棒控制器前面添加一個延遲補償項eLs。延遲補償項可以由泰勒級數擴展為

由于延遲時間非常小,因此上式的高階項接近于零,從而可以被忽略。系統的傳輸延遲會因加入了延遲補償項而被消除:
上式的近似只有當延遲非常小的時候才成立。
根據圖1和圖2的關系,圖4可以等效為圖5。在圖5中,ρd(ρd)分別為d-(q-)軸模型不確定性因子,可以被提出的魯棒控制器所補償。
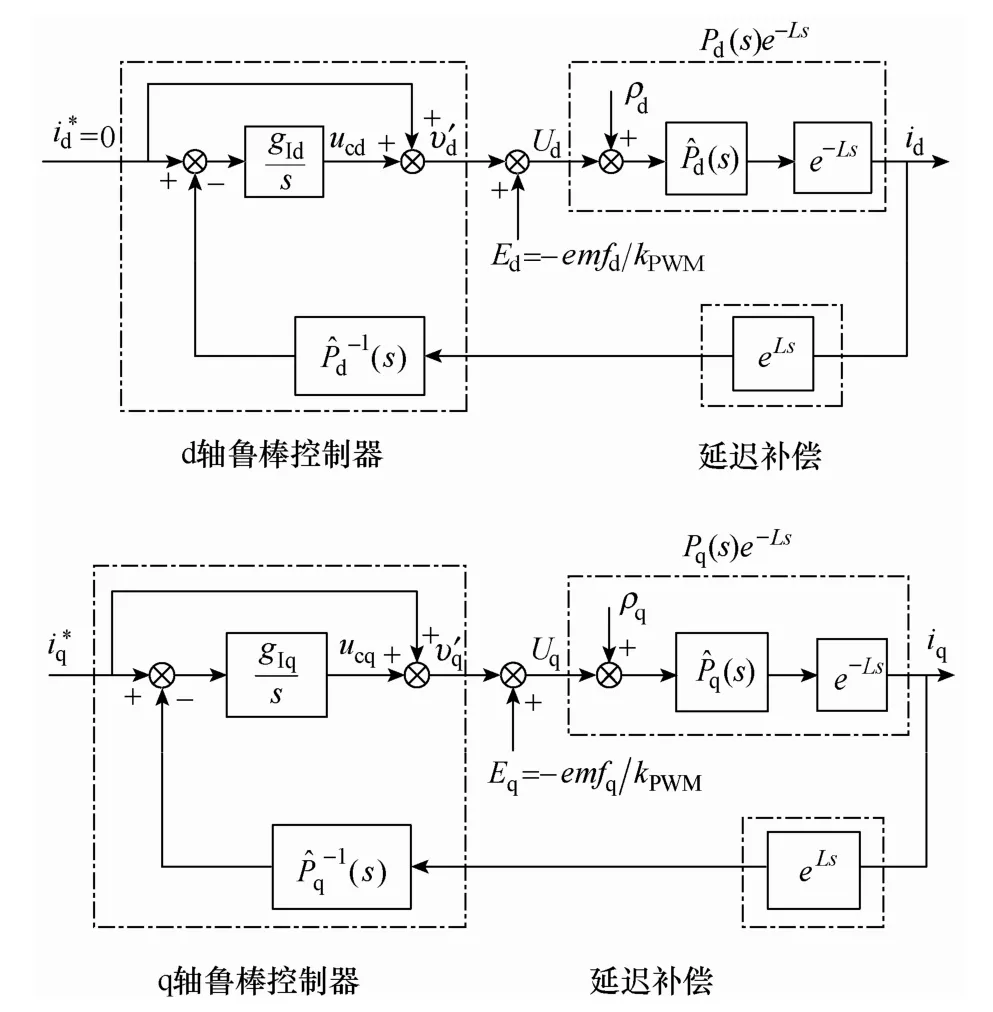
圖5 d-(q-)軸電流魯棒控制等效框圖
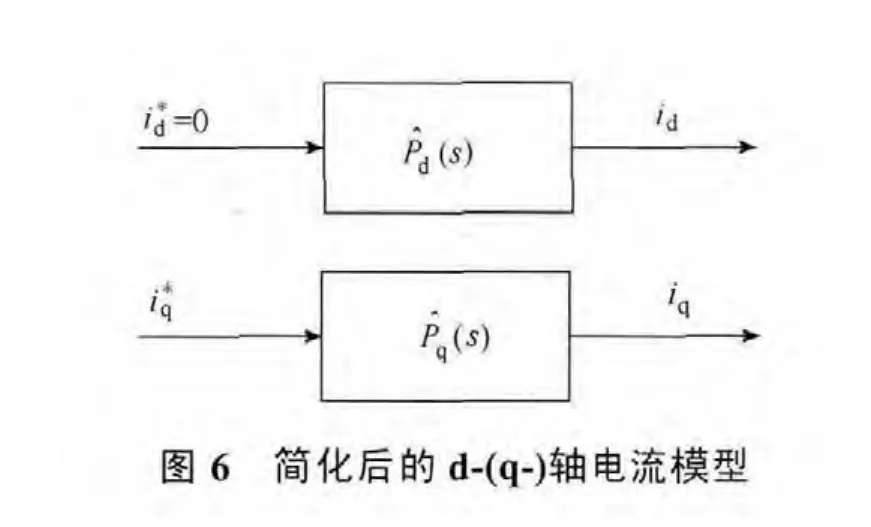
由于系統的不確定性和延遲性可以被帶有延遲補償的魯棒控制器所消除[12],從而d-(q-)軸模型可以近似為如圖6所示的理想的一階模型這說明系統的直流增益為1。

圖4 d-(q-)軸電流魯棒控制框圖
3 仿真結果
以美國Kollmorgen公司生產的型號為IL12-050的無鐵心永磁直線同步電機為例,它具有連續的122N推力,可達到400N的峰值。其參數如下:動子電阻Rs=17.2Ω,電感L=6mH,額定電流In=2.1A,反電動勢常數Ke=57V/m/s。
控制器的積分增益:gI=6500
傳輸延遲:L=0.00005s
干擾:d=0.1sin(1000t)A
當系統的電流控制采用PI控制器時,該閉環傳遞函數是個二階系統,設置其參數:ωn=5204,ζ=0.707,KP=0.7266和 KI=4513。
圖7為在給定電流指令*
id=0時,d軸電流的階躍響應曲線保持為零。
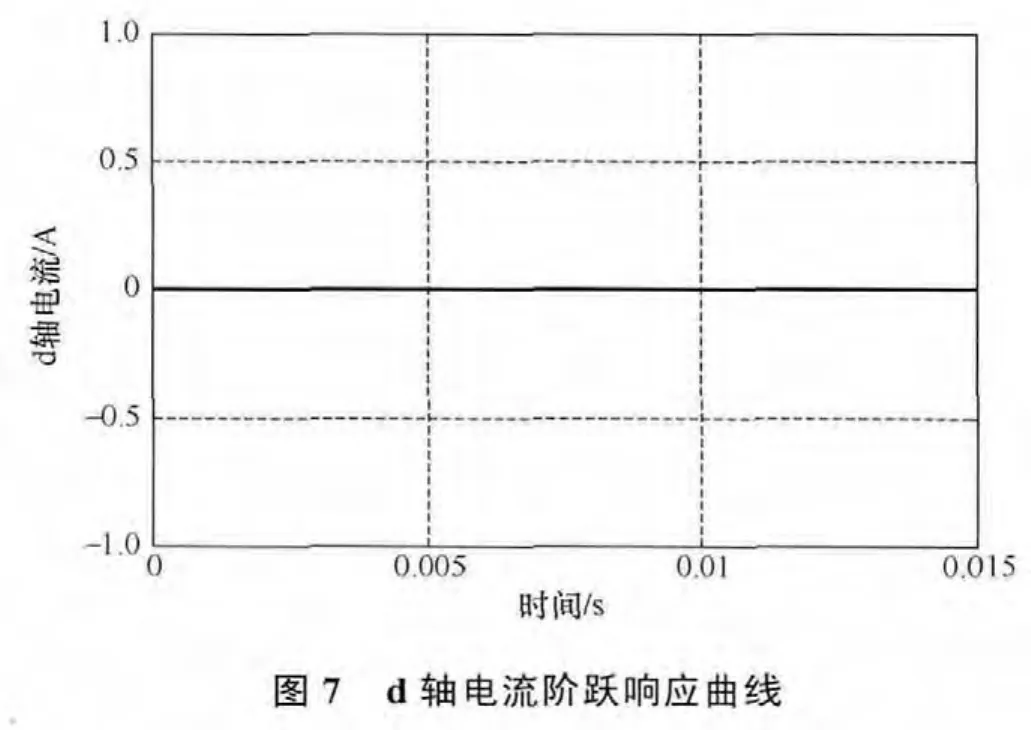
圖8為在無干擾時,采用PI控制器和魯棒控制器的系統的電流階躍響應曲線的對比。虛線表示給定的指令。從圖中可以看出,采用魯棒控制器的系統的電流階躍響應與給定指令更加接近。在無干擾的情況下,采用PI控制器和魯棒控制器的系統的穩態誤差都是非常小的。
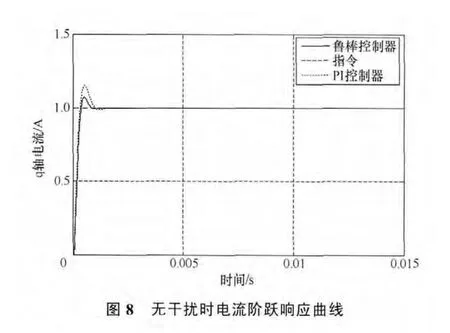
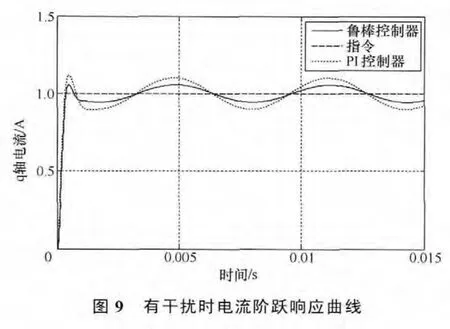
圖9為有干擾時,采用PI控制器和魯棒控制器的系統電流階躍響應曲線的對比。虛線表示給定的指令。可以看出,魯棒控制器對系統干擾的抑制效果要優于PI控制器。也就是說,提出的電流魯棒控制器能較好的抑制 d-q耦合效應和參數不確定性給系統帶來的干擾。
4 結論
在交流伺服系統控制中,電流環的響應速度要遠遠大于速度環和位置環,為了保證電機定子電流響應的快速性,電流控制器的實現不應太復雜。本文在分析了ILPMSM數學模型的基礎上,對無鐵心永磁直線同步電機系統的電流控制提出了一個帶有延遲補償的魯棒控制器。通過對控制系統的電流階躍響應進行仿真分析,證明了控制策略的有效性和可靠性,為直線電機的魯棒控制提供了理論依據。
[1] 郭慶鼎,孫宜標,王麗梅. 現代永磁電動機交流伺服系統[M]. 北京:中國電力出版社, 2006: 138-146.
[2] 李義強,周惠興. 精密伺服用無鐵心永磁同步直線電動機研究綜述[J]. 微電機, 2008, 41(5): 71-76.
[3] 劉曉,張玉秋,葉云岳,等. 雙邊空心式永磁直線伺服電機的空載磁場分析. 電機與控制學報, 2010,14(1): 56-60.
[4] 張代林,陳幼平,艾武,等. 基于觀測器模型的直線電機干擾抑制技術的研究[J]. 中國電子工程學報,2007, 27(12): 14-18.
[5] ZHU Y W, CHO Y Y. Thrust ripples suppression of permanent magnet linear synchronous motor[J]. IEEE Trans. On Magnetics, 2007, 43(6): 2537-2538.
[6] 王麗梅,趙艇. 永磁同步直線電機魯棒自適應位置控制[J]. 沈陽工業大學學報, 2008, 30(1): 15-18.
[7] XU J X, YAN R. On repetitive learning control for periodic tracking tasks[J]. IEEE Trans. on Automatic Control, 2006, 51(11): 1842-1847.
[8] ZHOU L, SHE J H, WU M, et al. Design of a robust modified repetitive-control system for a periodic plant[J]. ASME J of Dynamic Systems, Measurement and Control, 2012, 134(1): 1-7.
[9] NAGASHIMA M, USUI K, KOBAYASHI M. Rejection of unknown periodic disturbances in magnetic hard disk drives[J]. IEEE Trans. Magn., 2007, 43(9):3774-3778.
[10] TOMIZUKA M. Dealing with periodic disturbances in controls of mechanical systems[J]. Annual Reviews in Control, 2008, 32(2): 193-199.
[11] 魯文其,胡育文,梁驕雁,等. 永磁同步電機伺服系統抗擾動自適應控制[J]. 中國電機工程學報, 2011,31(3): 75-81.
[12] 孫曉東,朱熀秋, 張濤, 等. 一種永磁同步電機解耦控制的新方法[J]. 微電機, 2010, 43(1): 61-65.
Current Robust Control for Ironless Linear Permanent Magnet Synchronous Motor
Sun Yibiao Liu Ling
(School of Electrical Engineering, Shenyang University of Technology, Shenyang 110870)
For the characteristics of ironless linear permanent magnet synchronous motor(ILPMSM) system being influenced by disturbance due to d-q axis coupling effect and parameters varieties, the investigated robust controller with system delay compensation is desired to achieve high performance. The proposed controller consists of an inverse of the first-order reference model and integral term. The proposed algorithm does not need to be combined with other control algorithms and the system parameters are not required to be known precisely. The system delay compensation adopts an inverse system delay model to compensate the system transport delay effect. Compared with PI controller, robust controller can restrain the effects of uncertainty disturbances and compensate for system transport delay in the ILPMSM system. Simulation result confirms the control scheme can reduce the overstrike of system with good dynamic response and dynamic characteristics.
ILPMSM; delay compensation; robust controller; uncertainty disturbances
教育部博士學科點專項科研基金項目(20102102110001)
孫宜標(1970-),男,安徽巢湖人,沈陽工業大學副教授,博士,主要研究方向為交流伺服系統、魯棒控制、非線性系統。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
