機載光學定位測量跟蹤器研究
2014-01-21 00:51:44竺春祥鹿存躍黃整章
電子設計工程 2014年20期
竺春祥,鹿存躍,楊 明,黃整章
(上海交通大學 儀器科學與工程系,上海 200240)
機載光學定位測量系統(tǒng)一般由基座、照準架、伺服控制、攝像設備等部分組成[1-2],主要安裝于汽車、飛機、船舶等多種載體上,通過可見光攝像機等有效載荷協(xié)同載機上其它電子設備完成對地目標瞄準、跟蹤、定位測量功能。本文所主要介紹的光學定位測量跟蹤器是安裝在無人機上,并與激光測距儀和GPS定位系統(tǒng)配合,以完成對如橋梁裂縫[3-4]等地面固定目標的精確定位功能[5-7]。目前對跟蹤器的研究主要應用傳統(tǒng)的電磁電機配合減速機構。跟蹤器電機多采用單路驅(qū)動的方式,存在結(jié)構復雜、精度低、不易小型化等缺點。
本文利用超聲電機[8-9]和雙路電機驅(qū)動器來構建機載光學定位測量跟蹤器。系統(tǒng)包括兩個直徑為60 mm超聲電機組成的攝像支架、以高性能STM32F103ZET6為核心的雙路超聲電機驅(qū)動器。設計了一種機載光學定位測量跟蹤器。該系統(tǒng)具有響應快、精度高、易于小型化、集成度高等優(yōu)點。
1 跟蹤器總體結(jié)構設計
圖1為跟蹤器系統(tǒng)總體結(jié)構圖。系統(tǒng)由仰俯回轉(zhuǎn)框架、水平回轉(zhuǎn)框架和支承框架組成。仰俯回轉(zhuǎn)框架由一個帶編碼器的超聲波電機驅(qū)動,通過剛性聯(lián)軸器在一端與仰俯回轉(zhuǎn)框架相連。超聲波電機所帶編碼器精度為2 000線。高清變焦攝像頭安裝在仰俯回轉(zhuǎn)框架內(nèi)。在仰俯回轉(zhuǎn)框架的另一端安裝有一個精度為0.1°的編碼器,用于對帶編碼器的超聲波電機驅(qū)動和定位精度進行評測。另一組帶編碼器的超聲波電機安裝在支承框架上,通過剛性聯(lián)軸器與水平回轉(zhuǎn)框架相連,并帶動其做水平旋轉(zhuǎn)運動。
2 跟蹤器硬件電路設計

圖1 跟蹤器系統(tǒng)總體結(jié)構圖Fig.1 Structure diagram of the tracker system
所研制的跟蹤器硬件電路框圖如圖2所示。主要由基于STM32F103ZET6的信號產(chǎn)生電路、雙超聲電機驅(qū)動電路組成。首先,上位機圖像處理軟件根據(jù)目標位置確定電機旋轉(zhuǎn)角度值,并將該值通過串口發(fā)送到基于STM32的雙路超聲電機控制器中,驅(qū)動兩個電機旋轉(zhuǎn),同時STM32對編碼器輸入的脈沖進行計數(shù),從而對電機的起停和旋轉(zhuǎn)角度進行控制。實現(xiàn)目標運動的實時跟蹤。
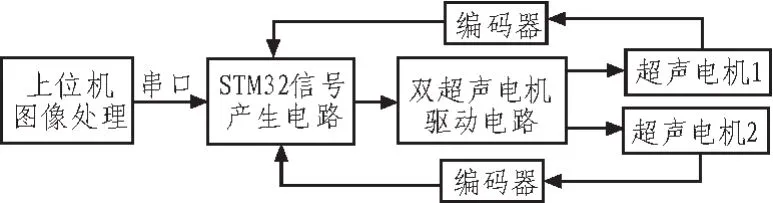
圖2 驅(qū)動電路框圖Fig.2 Structure diagram of drive circuit
2.1 基于STM32F103ZET6芯片的信號產(chǎn)生電路
超聲電機的驅(qū)動信號由32位ARM系列STM32F103ZE T6芯片來產(chǎn)生。該芯片以ARM Cortex-M3為核心,具有72 MHz主頻、512 KB Flash的代碼存儲空間和64 KB的SRAM。STM32F103ZET6芯片擁有面向電機控制的豐富外設。其中,高級控制定時器(TIM1和TIM8)和通用定時器(TIMx)是完全獨立的,它們不共享任何資源。本文使用高級控制定時器TIM1和TIM8分別產(chǎn)生兩對相差90°,帶死區(qū)的互補PWM信號,且該死區(qū)大小可編程控制。由芯片數(shù)據(jù)手冊可知,兩個高級控制定時器能產(chǎn)生6對互補PWM波。跟蹤器需要4對互補PWM波。因此,TIM1和TIM8可滿足要求。此外,TIM1和TIM8有多種工作模式,本系統(tǒng)使用其 Toggle模式,該模式可以控制一個輸出波形,或者指示一段給的時間已經(jīng)到時。通過配置各通道比較寄存器的內(nèi)容就可以產(chǎn)生不同相和不同頻的PWM波。
2.2 雙路超聲電機驅(qū)動電路
圖3為雙路超聲電機驅(qū)動電路框圖。該電路由STM32接收上位機軟件發(fā)送的角度信息,產(chǎn)生8路互差 90°的同頻方波信號,每四路經(jīng)光耦隔離電路、開關管驅(qū)動電路和推挽逆變電路以及阻抗匹配電路后,最終得到四路相差 90°的高頻高壓的正弦信號。驅(qū)動電機旋轉(zhuǎn)。
3 跟蹤器軟件設計

圖3 雙超聲電機驅(qū)動電路框圖Fig.3 Diagram of double ultrasonic motor drive circuit
跟蹤器系統(tǒng)軟件流程圖如圖4所示。該程序主要實現(xiàn)3部分功能:串口通訊;產(chǎn)生兩組超聲電機驅(qū)動信號;對編碼器的脈沖進行捕獲和計數(shù)。首先,串口通訊給下位機發(fā)送水平方向和垂直方向的轉(zhuǎn)動角,下位機產(chǎn)生驅(qū)動信號,驅(qū)動超聲電機旋轉(zhuǎn),同時STM32對編碼脈沖進行捕獲計數(shù),到達設定角度時停止電機。
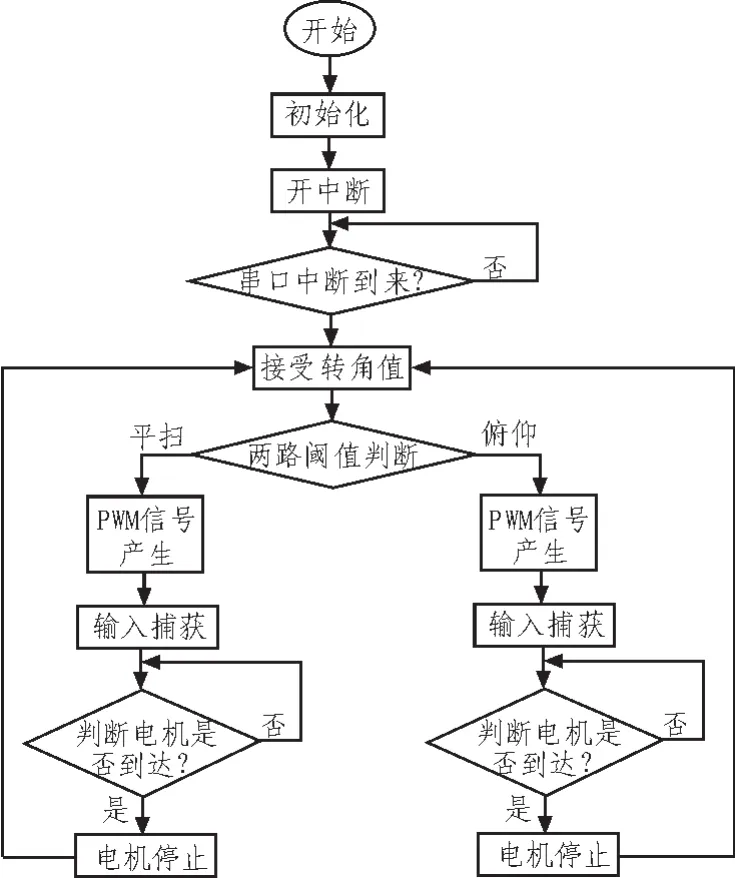
圖4 下位機主程序流程圖Fig.4 Flow diagram of the main program
驅(qū)動信號產(chǎn)生通過配置TIM1和TIM8高級控制定時器工作在輸出比較模式。其產(chǎn)生信號的頻率通過下式得到:

式(1)中,SystemCoreClock 系統(tǒng)時鐘為 72 MHz,f為高級定時器TIMx所產(chǎn)生PWM信號的頻率。相位差通過配置通道1捕獲/比較寄存器 (TIMx_CCR1) 或通道 2捕獲/比較寄存器(TIMx_CCR2)的值實現(xiàn)。例如,當 TIMx_CCR1 的值為 861,若需要TIMx_CH2滯后TIMx_CH1 90°時,則TIMx_CCR2的值為:

4 實驗結(jié)果
所研制的跟蹤器驅(qū)動電路如圖5所示,電路可產(chǎn)生四路高頻高壓正弦信號,同時驅(qū)動兩個超聲電機。為了驗證系統(tǒng)高速運行下的啟停特性,進行了電機按設定角度啟停實驗。在電機初始靜止的情況下,設定計數(shù)脈沖以50個為間距逐步遞增,同時用更高精度傳感器對其測試,得到的電機設定角與實際轉(zhuǎn)角曲線如圖6所示。測試的點均落在理論曲線附近且誤差不大于一個編碼脈沖即0.18°。結(jié)果表明,本系統(tǒng)響應時間小于 3 ms,左右轉(zhuǎn)動角度 0°~360°,仰俯轉(zhuǎn)動角度-20°~200°,左右轉(zhuǎn)動速度 200 °/s,仰俯轉(zhuǎn)動速度 200 °/s。 超聲電機最高轉(zhuǎn)速150 r/min,所測試的點均落在理論曲線附近且誤差不大于一個編碼脈沖即0.18°。
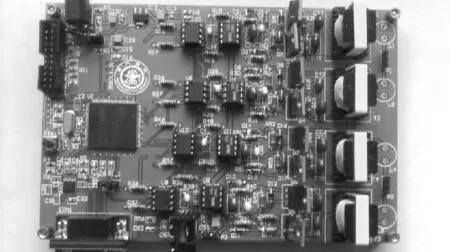
圖5 跟蹤器驅(qū)動電路實物圖Fig.5 Physical map of tracker circuit

圖6 電機設定角與實際轉(zhuǎn)角曲線Fig.6 Curve of setting angle and actual angle of motor
5 結(jié)論
文中對一種機載光學定位測量跟蹤器進行了研究。從硬件和軟件兩方面介紹了該系統(tǒng)的設計思路。實驗結(jié)果表明,該系統(tǒng)能較精確的定位到相應的角度。該系統(tǒng)較好的克服了目前由電磁電機構建的跟蹤器的不足,可將其應運在機載車載的隨動平臺搭建,監(jiān)控測量,地面固定目標的定位測量等領域,具有廣泛應用前景。
[1]金光.機載光電跟蹤測量的目標定位誤差分析和研究[D].長春:中科院長春光學精密機械與物理研究,200l.
[2]趙濱.基于機載光電測量系統(tǒng)的目標定位精度研究[D].南京:南京航空航天大學,2011.
[3]Ryall M.J Bridge management[M].Massachusetts:Butterworth-Heinmann,2003.
[4]楊美玲.基于圖像處理的混凝土橋梁裂縫測量與分析[D].武漢:華中科技大學,2009.
[5]黃成齋.跟蹤測量電視全自動調(diào)光系統(tǒng) [J].光電工程,1999,26(3):17-19.HUANG Chen-zhai.A full-automatic light adjustment system for tracking and measurement television[J].Opto-Electronic Engineering,1999,26(3):17-19.
[6]Billy M,Gaddy.The KA-99 panoramic camera[J].SPIE,1976(79):190-196.
[7]Chen V C,Miceli W J.The effect of roll,pitch and yaw motions on ISAR imaging[J].SPIE,2006(3810):149-158.
[8]趙淳生.超聲電機技術與應用[M].北京:科學出版社,2007.
[9]胡敏強,金龍,顧菊平.超聲波電機原理與設計[M].北京:科學出版社,2005.
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2017年9期)2017-09-26 03:41:45