亞軌道飛行器控制系統快速原型設計
2014-01-17 05:45:50李新國泮斌峰
電子設計工程 2014年23期
毛 瑞,李新國,泮斌峰
(西北工業大學 航天學院,陜西 西安 710072)
亞 軌 道 飛 行 器 (Suborbital Reusable Launch Vehicle,SRLV)是一種能夠在亞軌道空間完成飛行任務的可重復使用運載器[1],近年來在軍事和民用市場的巨大潛力被不斷挖掘,具有廣闊發展前景。由于飛行器長時間在大馬赫數、大攻角下飛行,控制系統的微小偏差或滯后都會對飛行狀態產生影響,而在飛行器控制系統的設計初期,傳統開發模式一般通過純數字仿真來分析控制性能,無法檢驗其應用于實物對象的仿真精度與實時性效果,不利于后續的硬件設計與生產[2]。如何在提升控制性能的同時縮短研發周期、降低研發成本、提高研發效率已經成為亞軌道飛行器控制系統設計的重要問題[3]。
為了實現對飛行器控制系統的快速、廉價、高效等設計需求,提出了一種基于快速控制原型技術 (Rapid Control Prototyping,RCP)的亞軌道飛行器控制系統設計方案,并完成系統的軟硬件設計與實時仿真,通過對控制參數快速反復設計調節系統的控制性能。快速控制原型技術采用“V”形開發流程,從模型設計到原型系統實時仿真都在一體化環境下實現[4],便于研究控制器對實物對象的控制效果而且研發成本低廉。
1 SRLV再入段數學模型
選擇亞軌道飛行器飛行參數變化劇烈、控制策略復雜的再入過程為仿真階段,環境模型選擇USSA76標準大氣模型[5],建立SRLV的再入運動方程組。
SRLV的再入運動可以看作質心運動與繞質心轉動運動的合成[6],分別描述SRLV質心的平移運動狀態以及飛行器機身繞質心轉動的姿態運動。
1)質心動力學方程
SRLV在慣性坐標系以矢量描述的質心動力學方程可以表示為:

將其投影到航跡坐標系中進行求解,經簡化后SRLV質心動力學方程如下:

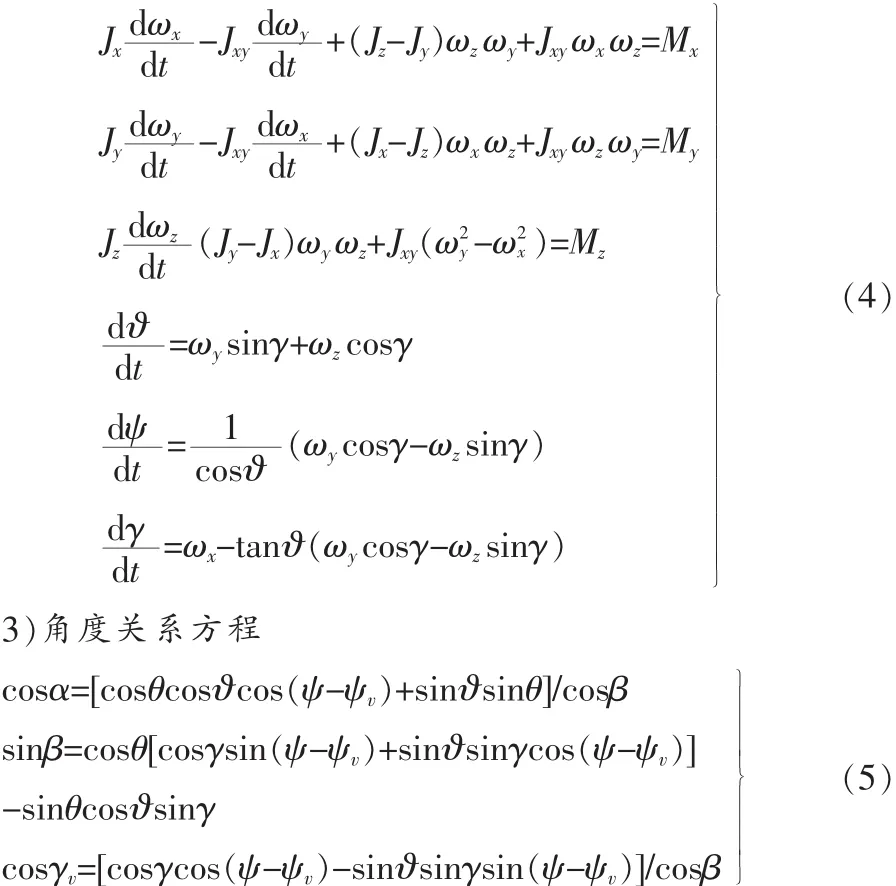
2)繞質心轉動的動力學方程
SRLV在慣性坐標系以矢量描述繞質心轉動的動力學方程可以表示為:

將其投影到機體坐標系中進行求解,經簡化后SRLV姿態動力學方程如下:
2 SRLV再入段控制系統設計
針對亞軌道飛行器再入過程,采用反饋線性化-PID控制方法實現控制系統設計。SRLV再入運動方程組具有顯著的非線性特征,本文利用反饋線性化方法[7]對SRLV再入運動方程組進行線性化,得到飛行器的線性化系統模型,將運動方程組分解為縱向運動和側向運動,整個控制系統解耦為俯仰、偏航和滾轉3個通道并分別設計PID控制器。
亞軌道飛行器再入段控制機構主要包括反作用控制系統(Reaction Control System,RCS)與氣動舵。再入過程中控制機構分配方式通過橋接函數來表示:
如式(6)所示,由于SRLV再入初期動壓很小,氣動舵操縱效率低下,完全由RCS控制飛行;隨著動壓增大并達到q1,氣動舵介入操縱,將控制力矩按橋接函數分配給RCS與氣動舵;當動壓增大至q2,氣動舵已經完全可以滿足機動要求,RCS停止工作,氣動舵獨立控制飛行。

圖1 亞軌道飛行器控制系統結構圖Fig.1 Stucture chart of the suborbital reusable launch vehicle control system
根據亞軌道飛行器動力學與控制系統模型,設計控制系統結構如圖1所示,再根據反饋線性化后得到的線性系統對俯仰、偏航、滾轉通道分別設計PID控制器。
3 快速原型仿真系統設計
快速控制原型技術是一種新型的實時仿真技術,并引發了技術思維模式的變革,“從概念到硬件”的設計思想也成為實時仿真的新方向。該技術將控制算法下載至原型系統,通過I/O連接被控實物對象,用實時仿真機來模擬控制器與硬件設備連接,組成快速原型系統并進行實時仿真,通過系統快速反復設計以找到理想控制方案[8]。目前,快速原型技術主要應用于控制器產品開發、硬件在回路仿真和系統測試3大領域。
3.1 快速原型開發平臺
RtFly是西北工業大學空天飛行器實驗室自主研發的快速原型系統開發平臺,平臺利用Windows的實時擴展子系統RTX作為實時系統,可以迅速便捷地將SimuLink模型轉化為RTSS可執行程序,還提供產品型控制器的硬件接口,與硬件設備連接方便。
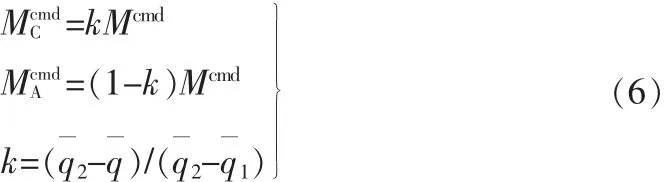
在實時仿真狀態與數據監控方面,RtFly平臺可通過圖形界面配置對仿真數據進行實時監控、在線調參;平臺還提供仿真變量的監控顯示控件,如儀表盤、LED、箭頭、開關、示波器、旋鈕、文本等,RtFly控件添加與參數調節界面如圖2所示。
本文選擇RtFly作為快速原型開發平臺,設計亞軌道飛行器控制系統的快速原型仿真系統,并通過RtFly的在線調參功能實現PID控制器參數的快速可重復設計。
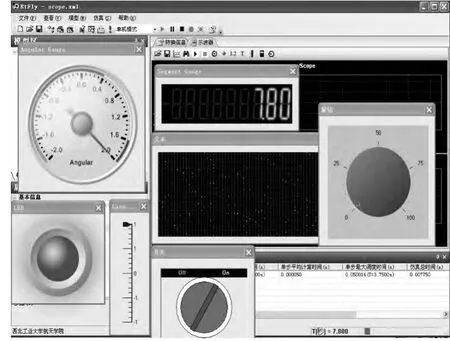
圖2 RtFly仿真平臺的控件添加與在線調參Fig.2 Control adds and online scheduling on RtFly simulation platform
3.2 快速原型軟件系統
軟件系統主要功能有仿真算法設計與建模、仿真程序編輯與調試、板卡通訊模塊設計與加載、代碼實時化編譯等。
本文選擇Matlab/Simulink作為模型開發及數字仿真平臺,實現SRLV數學模型建立、控制系統設計以及數字仿真。Matlab/Simulink提供圖形化交互環境,根據動力學模型與控制系統模型,能夠迅速建立SRLV再入段控制系統的Simulink框圖。
根據Simulink自定義模塊的規則定義,使用S函數(system-function)創建板卡驅動程序的自定義通訊模塊。調用通訊模塊并將Simulink仿真模型分布至兩臺實時仿真機,通過I/O與硬件設備進行數據交互。
選擇Simulink的實時工作間機制 (Real-Time Workshop,RTW)作為代碼實時化工具,將 MDL模型文件轉化為C++實時代碼,RtFly通過編譯實時代碼直接生成可執行的實時程序RTSS,應用于實時仿真。
3.3 快速原型硬件系統
硬件系統指實時仿真中的硬件與接口設備部分。硬件實物通過接口設備與實時仿真機實現數據交互。
硬件設備主要包括舵機與慣導設備(本文采用慣性測量組件),舵機通過接收D/A傳輸的模擬信號(電壓指令),獲得直流偏置電壓并與電位器產生壓差信號,控制電機轉動產生舵偏信號,通過A/D轉換為數字信號返回仿真機。慣導設備通過陀螺儀、加速度計分別測量飛行器角速度信號與三軸方向的加速度信號,通過解算得出飛行器角度信號并傳輸至實時仿真機。接口設備包括以太網卡、VMIC卡、DI/DO、串口、1553b總線、A/D、D/A 卡等。
3.4 SRLV再入段控制系統的快速原型設計
亞軌道飛行器快速原型仿真系統如圖3所示,仿真實驗裝置由一臺總體控制計算機、兩臺實時仿真機以及慣導設備與舵機等硬件設備組成。
總體控制計算機負責仿真管理與指令控制;一臺實時仿真機加載SRLV模型,包括動力學模塊、環境模塊、高度與動壓模塊等;另一臺實時仿真機加載控制系統模型,主要包括PID控制器模塊、反饋線性化模塊與控制分配模塊。

圖3 飛行器快速原型仿真系統結構圖Fig.3 Stucture chart of the SRLV rapid control prototyping simulation system
網絡連接方面,通過以太網連接主控計算機與兩臺實時仿真機,實現實時化代碼下載與仿真管理;通過光纖連接反射內存卡VMIC5565,總體控制計算機、SRLV模型仿真機、舵機、慣導設備組成實時網絡。VMIC是基于反射內存(RM)技術的實時網卡,當網絡中一個節點對其本地共享內存進行寫操作時,該節點的數據更新消息(中斷)立即反射至網絡中的所有節點,從而達到實時數據傳輸效果與時鐘同步效果。
硬件接口方面,慣導設備通過總線將角度信號發送給SRLV模型仿真機,選擇Alta公司的PCI-1553-2型總線板卡作為接口設備,總線傳輸速度為1M比特每秒,信息格式選擇RT-RT(遠程終端)方式。
舵機與SRLV模型仿真機通過A/D、D/A通信,選擇使用National Instruments公司的PCI-6733型D/A卡與PCI-1742型A/D卡。A/D、D/A是模擬信號與數字信號轉換卡,仿真機將氣動舵操縱信號通過D/A轉換為模擬信號發送給舵機,舵機運轉工作產生舵面偏轉,模擬信號通過A/D轉換為舵偏角的數字信號返回SRLV模型。
兩臺實時仿真機之間通過串口通信傳遞仿真數據,通過DI/DO實現時鐘的運行同步策略。串口是一種按位傳輸數據的通信方式,選擇Moxa公司的CP118U型串口卡。SRLV模型仿真機通過DO接口發送同步指令給控制系統仿真機,控制系統仿真機通過DI接口接收指令并開始解算控制信號,實現每個步長的時鐘運行同步,DI/DO選擇研華公司的PCI-1756板卡。
4 SRLV的快速原型仿真
4.1 仿真系統
亞軌道飛行器快速原型仿真系統主要包括SRLV模型、控制模型、舵機、慣性測量組件以及VMIC、A/D、D/A、串口等接口設備。SRLV模型實時仿真機的快速原型仿真模型如圖4所示,仿真機通過板卡通訊模塊與其他設備交互數據。
4.2 仿真流程
仿真過程分為數字仿真與快速原型實時仿真兩部分。具體仿真流程如下:
1)根據亞軌道飛行器數學模型與控制方案完成Simulink建模;
2)進行純數字非實時仿真,俯仰、偏航、滾轉通道分別調試,完成三通道PID控制參數調試,驗證仿真模型正確性;
3)建立快速原型仿真模型,用相應的板卡通訊模塊代替數字仿真模塊,模型轉化為帶有I/O通訊模塊的實時仿真模型;
4)利用RTW實現模型代碼實時化,并建立以太網連接總體控制計算機與仿真機,下載仿真模型實時代碼;
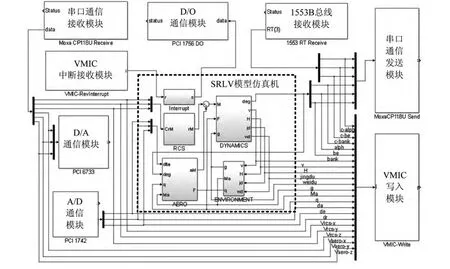
圖4 SRLV模型實時仿真機的快速原型仿真模型Fig.4 Rapid control prototyping simulation model on SRLV real-time simulation computer
5)編寫與調試串口、VMIC內存卡以及A/D、D/A的驅動程序,將硬件設備通過接口與仿真機連接,組建閉環回路;
6)快速原型實時仿真,利用Rtfly平臺的實時調參功能,快速調節各通道控制參數并進行反復設計,實現系統控制性能要求。
4.3 仿真結果
選擇仿真初始時刻高度為120 km,末端時刻高度為30 km,仿真步長為t=5 ms,示波器采樣頻率T=20 ms。
仿真開始前,總體控制計算機運行RtFly3.1,選擇模式為主控端模式,載入實時化模型RCP_SRLV.xml并編譯;兩臺實時仿真機運行RtFly3.1,選擇模式為客戶端模式,通過以太網分別下載SRLV模型與控制系統模型的實時化代碼。總體控制計算機對實時仿真機進行初始參數配置,時鐘同步策略為運行同步。
仿真運行階段,總體控制計算機通過VMIC發送啟動指令給SRLV模型仿真機、舵機和慣導設備,仿真機將同步指令通過D/O發送至控制系統仿真機,同步解算動力學模型與控制系統模型。每個步長都同步運行,保證仿真系統與硬件實物的實時性要求。仿真界面及參數曲線如圖5所示。
仿真結束,SRLV模型仿真機發送結束狀態信息給總體控制計算機,總體控制計算機控制其他設備結束仿真,快速原型系統進入復位狀態。
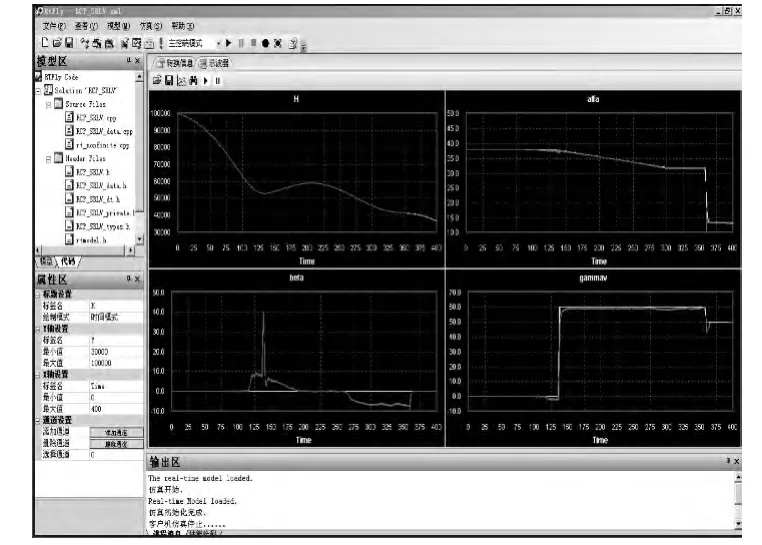
圖5 RtFly快速原型仿真Fig.5 Rapid control prototyping simulation on RtFly platform
5 結 論
本文主要研究控制系統的快速原型設計,以亞軌道飛行器為研究對象,選擇再入過程為仿真階段,建立六自由度數學模型,設計飛行器控制系統,完成亞軌道飛行器的快速原型仿真系統設計并進行實時仿真,通過對控制參數快速反復設計達到控制效果。
仿真結果表明,快速原型技術能夠有效應用于亞軌道飛行器控制系統設計中,其可重復設計、開發速度快、成本低等特點也符合控制系統設計的發展要求,有望更廣泛地應用于飛行器設計的各方面研究與開發。
[1]Martin J C,Law G W.Suborbital reusable launch vehicles and applicable market[R].The Aerospace Corporation,2002, EI Segundo,CA 90245-4691.
[2]王振國,羅世斌,吳建軍.可重復使用運載器研究進展[M].長沙:國防科技大學出版社,2001.
[3]管文華,肖愛武.快速原型技術現狀與發展趨勢研究[J].現代機械,2005,12(3):65-66.GUAN Wen-hua,XIAO Ai-wu.The present situation and the developing tendency research of the rapid prototying[J].Modern Machinery,2005,12(3):65-66.
[4]Chwan-Hsen Chen,Hsu-Lun Tsai,Jun-Chiao Tu.Robot control system implementation with rapid control prototyping technique, 2004 IEEE International Symposium on Computer Aided Control Systems Design,2004.
[5]鄒翔,劉蕓,任平,等.亞軌道飛行器再入段導航制導快速原型設計[J].微處理機,2010,6(29):98-105.ZOU Xiang,LIU Yun,REN Ping,et al.The design of reentry navigation and guidance rapid prototype for suborbital launch vehicle[J].Microprocessors,2010,6(29):98-105.
[6]李新國,方群.有翼導彈飛行動力學[M].西安:西北工業大學出版社,2004.
[7]湯志杰.非線性反饋線性化方法在飛控系統中的應用[D].西安:西北工業大學,2002.
[8]泮斌峰.導彈制導系統快速原型研究[D].西安:西北工業大學,2007.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中國特種設備安全(2022年6期)2022-09-20 02:52:28
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年11期)2018-08-04 03:26:08
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
