一種基于車載自組網(wǎng)的停車位協(xié)作發(fā)現(xiàn)算法
2014-01-16 09:21:30李德敏張曉露
電子設(shè)計工程 2014年5期
關(guān)鍵詞:信息
李 鵬,李德敏,張曉露
(東華大學(xué) 信息科技與技術(shù)學(xué)院,上海 201620)
在停車位發(fā)現(xiàn)服務(wù)中,由于車載自組網(wǎng)的拓?fù)浣Y(jié)構(gòu)具有快速頻繁變化的特點,使得原有的C/S構(gòu)架網(wǎng)絡(luò)缺乏靈活性和適用性,而車載自組織網(wǎng)絡(luò)(Vehicular Ad Hoc Network,VANET)提供了一種分布式停車位發(fā)現(xiàn)解決方案[1]。在分布式的VANET系統(tǒng)中,車輛節(jié)點通過與通信范圍內(nèi)的節(jié)點組成臨時的ad hoc網(wǎng)絡(luò)來進(jìn)行多跳通信、交換信息(包括實時的駕駛者信息、路況信息以及非實時的交通模式信息)[2],這為分布式停車位發(fā)現(xiàn)提供了數(shù)據(jù)通信基礎(chǔ)。
2006 年Caliskan等人[3]在提出了一種基于車載自組網(wǎng)的分布式停車位發(fā)現(xiàn)模型,通過階段性信息采集來進(jìn)行停車位計算。Mathur等人[4]在2009年提出了一種集中式和一種分布式方案來解決尋找停車位問題。在集中式方案中車輛節(jié)點安裝超聲波傳感器,沿道路行進(jìn)過程中收集停車位數(shù)據(jù)信息,然后向中央服務(wù)器提出申請來得到停車位分配服務(wù)。同時闡述了分布式停車系統(tǒng)的重要性。2010年Mathur等人[5]對集中式停車位發(fā)現(xiàn)思想予以實現(xiàn)和評估。2011年, Kokolaki等人[6]提出了一種分布式的機(jī)會停車位發(fā)現(xiàn)算法(OAPS -Opportunistically Assisted Parking Search),其基本思想是車
輛節(jié)點在停車位搜尋過程中與網(wǎng)絡(luò)中的鄰居節(jié)點進(jìn)行分布式機(jī)會通信,交換路況信息和停車位信息,基于這些儲存在緩存中的信息按照搶占式原則計算出最近且最可達(dá)的停車位。
在具有代表性的OAPS算法中,機(jī)會通信可以讓車輛靈活的掌握網(wǎng)內(nèi)鄰居節(jié)點的信息從而使停車位決策具有很大的智能性,但由于搶占式的原則,不能很好的體現(xiàn)整體的系統(tǒng)性能。因此本文基于OAPS提出了一種協(xié)作式停車位發(fā)現(xiàn)算法(簡稱COAPS- Collaborative OAPS)。該算法使用機(jī)會通信方式,利用車輛和停車位的數(shù)據(jù)信息來實現(xiàn)一種車輛與停車位協(xié)作交互,具有較好系統(tǒng)利用率的停車位分配機(jī)制,從而在性能上獲得兩方面的優(yōu)勢:1)在分布式系統(tǒng)的靈活、成本低的特點下,克服車輛節(jié)點的“自私競爭”,做出最大限度滿足自身和全局的停車位選擇;2)車輛節(jié)點通過與停車位的報文交互來擴(kuò)展通信范圍,獲得比車輛通信范圍內(nèi)更大的信息量,從而做出具有協(xié)作特點的決策。
1 COAPS策略描述
1.1 問題描述
典型的停車位發(fā)現(xiàn)服務(wù)的問題描述在[6]已有敘述,其場景主要由地理信息、車輛節(jié)點及停車位節(jié)點組成,如圖1所示,(方塊代表車輛節(jié)點,實心點代表停車位,圓圈Mij代表路徑的交叉口節(jié)點)。

圖1 停車位發(fā)現(xiàn)服務(wù)場景示意圖Fig. 1 Typical scene of parking lot discovery service
基于圖1場景信息停車位發(fā)現(xiàn)算法可描述為:車輛節(jié)點如何在與鄰居節(jié)點競爭與協(xié)作的情況下從可用的停車位節(jié)點中找出最有可能占用且盡可能兼顧?quán)従庸?jié)點利益的最優(yōu)停車位。
OAPS基于搶占式原則總是選擇個體指標(biāo)最好也即最近的停車位,在典型的節(jié)點競爭場景下其停車位選擇如圖2所示。
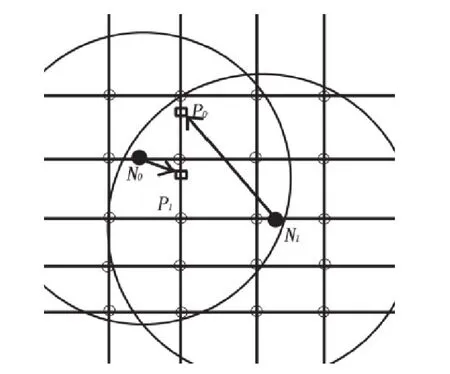
圖2 OAPS車輛節(jié)點競爭Fig. 2 Competition of vehicles in COAPS
由圖2可知,車輛節(jié)點 具有兩個距離相近的停車位P0和 P1,但是占用P1后對節(jié)點N1造成了很大的額外路徑開銷,缺乏協(xié)作性。這種不良競爭會造成鄰居節(jié)點的利益損失,也是COAPS主要解決的問題,圖3是COAPS的理想競爭示意圖。對比圖2、圖3可知,如果要兼顧?quán)従庸?jié)點的利益就需要對鄰居節(jié)點的路徑開銷予以考慮,使得每個車輛節(jié)點的決策能夠體現(xiàn)局部的整體效益。因此COAPS在選擇停車位時會計算鄰居節(jié)點的開銷,以VANET網(wǎng)絡(luò)內(nèi)各節(jié)點的綜合開銷作為衡量標(biāo)準(zhǔn)。但考慮每個節(jié)點選擇合作的傾向性不同,因此需要在個體開銷和鄰居節(jié)點開銷的權(quán)重及優(yōu)先級上予以體現(xiàn)(詳見第2節(jié))。
1.2 策略描述
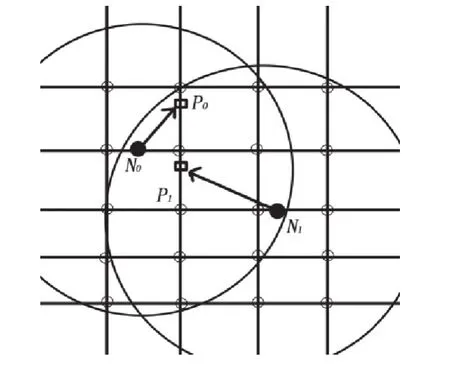
圖3 COAPS車輛節(jié)點競爭Fig. 3 Competition of vehicles in COAPS
停車位發(fā)現(xiàn)服務(wù)的核心是如何在拓?fù)浣Y(jié)構(gòu)頻繁變換的網(wǎng)絡(luò)場景中為車輛節(jié)點及時找到“最優(yōu)”的停車位。“最優(yōu)”的評價通常是通過兩個層次的指標(biāo)來予以衡量[1]:一是個體指標(biāo),即如何讓車輛節(jié)點以最短時間找到停車位;二是系統(tǒng)指標(biāo),如何讓停車位區(qū)域的停車位利用率達(dá)到最高。OAPS基于搶占式原則主要面向個體指標(biāo),COAPS則是綜合考慮兩種指標(biāo),在尊重個體指標(biāo)情況下最大限度兼顧系統(tǒng)指標(biāo)。
為了獲得節(jié)點的協(xié)作性,COAPS中的車輛節(jié)點以自己和鄰居節(jié)點的均衡開銷作為總開銷,通過調(diào)節(jié)鄰居節(jié)點開銷的權(quán)重來改變節(jié)點的協(xié)作傾向,但當(dāng)鄰居節(jié)點和停車位節(jié)點數(shù)量較多時,最優(yōu)解的求解變得非常緩慢低效,因此引入具有全局性能優(yōu)化的模擬退火算法可以顯著提高求解效率,同時針對停車位組合優(yōu)化問題的非凸型,避免陷入局部最優(yōu)。
在模擬退火的算法框架下,COAPS中的車輛節(jié)點與其鄰居節(jié)點首先在可選停車位中任意分配產(chǎn)生初始解(同時作為當(dāng)前解),在隨后從高溫到低溫的模擬退火過程中不斷的由當(dāng)前解產(chǎn)生新解,同時以各節(jié)點的整體路徑開銷作為性能評價指標(biāo)來確定其優(yōu)劣性,以大概率接受更優(yōu)解,以小概率接受次優(yōu)解(跳出局部最優(yōu)),當(dāng)溫度達(dá)到最低(算法的終止條件)時即得出最終的最優(yōu)停車位。每個節(jié)點依次進(jìn)行運(yùn)算即可得到其相應(yīng)的停車位,至此在單一節(jié)點間完成了協(xié)作。但在不同節(jié)點間仍會出現(xiàn)停車位沖突也即競爭的情況,此時通過節(jié)點與其最優(yōu)停車位之間的報文交換,由相應(yīng)停車位來從沖突的節(jié)點中選擇最優(yōu)節(jié)點,拒絕其他次優(yōu)節(jié)點,由此來完成多節(jié)點之間的協(xié)作。
以下是COAPS算法的總體描述,下一節(jié)將給出具體的算法實現(xiàn)細(xì)節(jié):
Step1:車輛節(jié)點從可用停車位中隨機(jī)選擇一個停車位以及參與競爭的鄰居節(jié)點集合,生成初始解,同時作為當(dāng)前解(詳見2.1);
Step2:由當(dāng)前解產(chǎn)生新解,對當(dāng)前解進(jìn)行更新(詳見2.2);
Step3:計算節(jié)點開銷作為評價解的性能指標(biāo),對當(dāng)前解進(jìn)行篩選(詳見2.3);
Step4:由初始解依次從高溫向低溫收斂,以Step3的性能指更新最優(yōu)解(詳見2.4);
Step5:與解得的最優(yōu)停車位進(jìn)行報文交互,確定是否可占用。(詳見2.5);
2 COAPS算法
基于1.2節(jié)的COAPS算法策略描述,本節(jié)將闡述算法的具體實現(xiàn)細(xì)節(jié)。
下面首先對COAPS所用到的基本參量進(jìn)行定義說明:
-V={V1,…V2…VN},1≤i≤x, 為車輛節(jié)點集合,x為車輛節(jié)點數(shù)目;
-Ni={,……},1≤j≤y,1≤i≤x為車輛節(jié)點在VANET網(wǎng)絡(luò)范圍內(nèi)的鄰居節(jié)點, 為鄰居節(jié)點數(shù)目;
-Pi={,……},1≤j≤z,1≤j≤x為Vi傳感感知到的和鄰居節(jié)點告知的停車位;
-C={V1,…V2…Vi},V ∈ V,∈Pi為節(jié)點Vi到停車位的開銷。
-α:為節(jié)點的協(xié)作參數(shù)。
2.1 停車位的初始解
COAPS算法首先為節(jié)點Vi從可用停車位Pi中隨機(jī)選取停車位。由于鄰居節(jié)點和停車位數(shù)量不確定,因此參與競爭的鄰居節(jié)點Ji的數(shù)量為鄰居節(jié)點數(shù)量和停車位數(shù)量的最小值:

Ji為鄰居節(jié)點集合的一個隨機(jī)子序列,其數(shù)量為min(|Pi|,|Ni|) 。同理Ki對應(yīng)的可選的停車位集合Ki為:


2.2 停車位的新解
對于節(jié)點Vi,其新解是在當(dāng)前解的基礎(chǔ)上產(chǎn)生的,目的是在當(dāng)前狀態(tài)下產(chǎn)生新的更優(yōu)解,來達(dá)到進(jìn)化演算的目標(biāo)。由于解是一個行向量序列,因此可以采取二交換的形式產(chǎn)生新解。
由于Ji是鄰居節(jié)點Ni的一個不完全子集,因此其補(bǔ)集的信息同樣需要考慮,這里我們設(shè)Ji的補(bǔ)集為Ji。在進(jìn)行交換前,首先從Ji集合選出兩個待交換元素和,再從Ji集合選出一個待交換元素,于是滿足:

為了讓Ji和Ji'同時參與選擇,利用0~1的概率隨機(jī)數(shù) α對進(jìn)行交換,即:

交換的結(jié)果便是更新Ji和Ji'。Ki的更新與Ji類似,不同之處在于與的關(guān)聯(lián),因此需在、、與四者之間進(jìn)行概率交換,即:
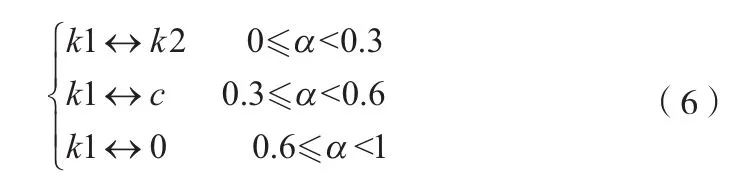
為了加速解的更新還需引入三交換,即在Ji和Ki中選出3個變量進(jìn)行交換,原理與二交換一樣,需要再引入一個隨機(jī)數(shù) 在二交換和三交換之間進(jìn)行概率均衡,即:


2.3 停車位的開銷計算
在節(jié)點Vi選取停車位情況下,首先計算Vi到的開銷為 Dijkstra(Vi,),其中Dijkstra是以道路節(jié)點為無向圖計算出的兩個節(jié)點間最短路徑。然后計算鄰居節(jié)點開銷,并用節(jié)點的合作傾向參數(shù)α進(jìn)行均衡,于是Vi對于停車位Picur的最終路徑總開銷C(Vi,)為:

考慮到不同節(jié)點的鄰居節(jié)點和可用停車位數(shù)量不同,且存在節(jié)點不可達(dá)的情況,因此用VANET網(wǎng)內(nèi)各節(jié)點的平均路徑開銷來統(tǒng)一表示。α表征節(jié)點與鄰居節(jié)點的協(xié)作程度,α=0時協(xié)作程度最低,退化為OAPS,α=1時協(xié)作程度最高,不考慮自身利益(通常α=0.5 )。
2.4 停車位的最優(yōu)解
對于節(jié)點Vi,其最優(yōu)停車位即是以C(Vi,)為目標(biāo)函數(shù)的最優(yōu)解。在模擬退火中,以作為初始解和當(dāng)前解,以 C(Vi,)作為內(nèi)能依次從高溫向低溫靠近,同時保持對當(dāng)前最低內(nèi)能及對應(yīng)當(dāng)前解的記錄,以大概率接受新的最優(yōu)解,小概率接受次優(yōu)解作為當(dāng)前解,從而最終算出達(dá)到最低溫度時的最優(yōu)停車位(最優(yōu)解),即:
2.5 車輛節(jié)點—停車位的報文交互
以上得到的關(guān)于節(jié)點Vi的最優(yōu)停車位反映的是VANET網(wǎng)內(nèi)信息,限于通信半徑的影響,節(jié)點的決策不能很好的體現(xiàn)以停車位為中心的區(qū)域信息。作為V-V(Vehicle-to-Vehicle)通信的一種重要途徑,以報文為載體的信息傳遞交互使得車輛節(jié)點不僅能獲取如停車位等相關(guān)場所信息,同時避免一些有害的場景[7]。因此與停車位的報文交互一方面可以擴(kuò)大節(jié)點對停車位的感知范圍,另一方面可以擴(kuò)大停車位對車輛節(jié)點的控制范圍,使節(jié)點的停車位決策超出局部VANET網(wǎng)絡(luò),擴(kuò)大到環(huán)繞停車位的VANET網(wǎng)絡(luò)群,表現(xiàn)系統(tǒng)指標(biāo)。
因此每個節(jié)點Vi在算得最優(yōu)停車位后,將計算出的總路徑開銷C(Vi,)發(fā)送申請報文給,從接收到的申請報文中選出開銷最小的節(jié)點向其發(fā)送確認(rèn)報文,確認(rèn)其被分配成功,并向其他節(jié)點發(fā)送拒絕報文。收到拒絕報文的節(jié)點開始新一輪的停車位搜索。
3 仿真與分析
車載自組網(wǎng)算法仿真主要分為交通仿真(Traffic Simulation)和網(wǎng)絡(luò)仿真(Network Simulation)[8],停車位發(fā)現(xiàn)算法側(cè)重于應(yīng)用層的交通仿真(不考慮網(wǎng)絡(luò)層的丟包率等),因此在VanetMobisim(VANET運(yùn)動模型及交通仿真平臺)的框架基礎(chǔ)上用Java語言擴(kuò)展算法模型,對COAPS與OAPS進(jìn)行對比仿真,仿真環(huán)境描述如下:
仿真場景范圍:1 200 m×1 200 m
車輛平均行駛速度:40 km/h
車輛通信范圍:200 m
車輛數(shù)目:5~80
停車位通信范圍:100 m
停車位數(shù)目:30
道路網(wǎng)格參數(shù)(水平/垂直方向道路的數(shù)量):20×20
為了表現(xiàn)典型的實際情況,地圖采用網(wǎng)格道路模型,隨機(jī)生成20×20的道路,車輛節(jié)點和停車位的起始位置隨機(jī)均勻分布于區(qū)域中,按照節(jié)點數(shù)量的不同分別進(jìn)行多次仿真,取統(tǒng)計均值來消除節(jié)點分布不同所造成的影響。仿真結(jié)果如圖4所示。
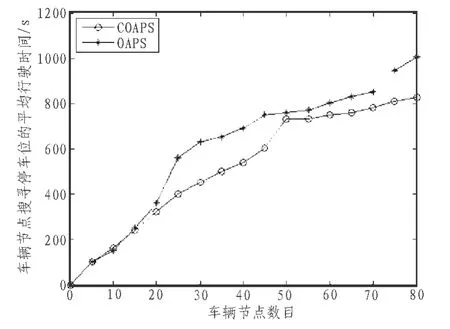
圖4 車輛節(jié)點搜尋停車位的平均行駛時間仿真對比Fig. 4 Comparative simulation of vehicles’ average parking lot discovery time
圖4為車輛節(jié)點搜尋停車位的平均行駛時間,停車位數(shù)量為30,車輛節(jié)點數(shù)目為5~80。分析圖4可知,在車輛數(shù)目少于停車位數(shù)量的情況下,由于所有節(jié)點最終都可以分配到停車位,COAPS與OAPS的平均搜尋時間相比差別不是很大,COAPS僅僅是在路徑規(guī)劃上略優(yōu)于OAPS。當(dāng)車輛數(shù)目接近于停車位數(shù)目時便出現(xiàn)了競爭,于是OAPS所造成的資源浪費(fèi)開始顯現(xiàn)出來,因為節(jié)點對最近停車位的盲目搶占極有可能造成鄰居節(jié)點更大的路徑開銷,而這種情況下最能體現(xiàn)出COAPS的協(xié)作性優(yōu)勢。當(dāng)車輛數(shù)目遠(yuǎn)多于停車位數(shù)量時不是所有車輛節(jié)點都可以分配到停車位,同時車輛的高密度增加了路徑分配的難度,這種環(huán)境最為惡劣的情況對OAPS影響最大,而COAPS按照分層局部最優(yōu)的原則保護(hù)鄰居節(jié)點的利益,因而受車輛密度的影響不大。
停車位的空閑時間是指車輛節(jié)點從開始尋找到預(yù)定到停車位的時間(不包括節(jié)點行駛到停車位的時間),體現(xiàn)了車輛節(jié)點對停車位的競爭情況,也是表征車輛協(xié)作性的一個重要指標(biāo)。停車位空閑時間及其均方差的仿真結(jié)果圖如圖5~6所示。
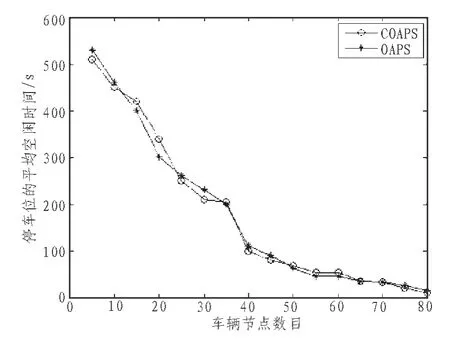
圖5 停車位的平均空閑時間Fig. 5 Average idle time of the parking lots
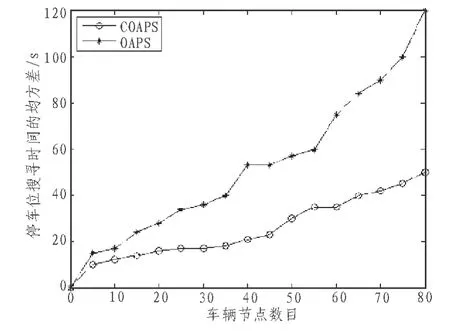
圖6 停車位搜尋時間的均方差Fig. 6 Average variance of parking lot discovery time
圖5顯示COAPS與OAPS的停車位平均空閑時間相差不大,但圖6顯示的停車位搜尋時間均方差要遠(yuǎn)小于OAPS。OAPS中的車輛節(jié)點基于搶占式原則總是選擇盡可能近的停車位,導(dǎo)致鄰居節(jié)點很有可能去選擇更遠(yuǎn)的停車位,因而車輛節(jié)點間不均衡的停車位選擇導(dǎo)致停車位空閑時間的均方差很大。由此可以看出COAPS算法由于兼顧?quán)従庸?jié)點的利益,均化了節(jié)點的停車位搜尋時間,體現(xiàn)出協(xié)作性特征。雖然在停車位平均空閑時間上沒有明顯優(yōu)勢,但可以換來停車位發(fā)現(xiàn)效率的顯著提升。
4 結(jié) 論
文中通過對停車位發(fā)現(xiàn)算法的研究,基于OAPS和模擬退火算法提出了一種協(xié)作式停車位發(fā)現(xiàn)算法(COAPS),通過車輛節(jié)點間的協(xié)作來避免不良競爭。通過COAPS與OAPS的對比仿真,驗證COAPS算法具有更好的全局效益,可以減少車輛節(jié)點的不良競爭和停車位發(fā)現(xiàn)時間。
[1] Caliskan M,Barthels A,Scheuermann B,et al.Predicting parking lot occupancy in vehicular ad hoc networks[C].Vehicular Technology Conference, 2007. VTC2007-Spring. IEEE 65th.IEEE, 2007: 277-281.
[2] Mousannif H,Khalil I,Al Moatassime H.Cooperation as a Service in VANETs[J].Journal of Universal Computer Science,2011,17(8):1202-1218.
[3] Caliskan M, Graupner D, Mauve M. Decentralized discovery of free parking places[C].Proceedings of the 3rd international workshop on Vehicular ad hoc networks. ACM, 2006: 30-39.
[4] Mathur S,Kaul S,Gruteser M, et al. ParkNet:a mobile sensor network for harvesting real time vehicular parking information[C].Proceedings of the 2009 MobiHoc S 3 workshop on MobiHoc S 3.ACM,2009:25-28.
[5] Mathur S, Jin T, Kasturirangan N, et al. Parknet: drive-by sensing of road-side parking statistics[C].Proceedings of the 8th international conference on Mobile systems, applications, and services.ACM,2010:123-136.
[6] Kokolaki E,Karaliopoulos M,Stavrakakis I.Opportunistically assisted parking service discovery:Now it helps, now it does not[J].Pervasive and Mobile Computing, 2012,8(2):210-227.
[7] Lee U, Gerla M. A survey of urban vehicular sensing platforms[J].Computer Networks, 2010, 54(4): 527-544.
[8] Stanica R, Chaput E, Beylot A L. Simulation of vehicular ad-hoc networks: Challenges, review of tools and recommendations[J].Computer Networks, 2011, 55(14): 3179-318
猜你喜歡
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
大眾創(chuàng)業(yè)(2009年10期)2009-10-08 04:52:00
數(shù)字社區(qū)&智能家居(2009年7期)2009-09-29 08:16:48
數(shù)字社區(qū)&智能家居(2009年11期)2009-06-25 04:30:34
數(shù)字社區(qū)&智能家居(2009年3期)2009-04-21 03:09:04
數(shù)字社區(qū)&智能家居(2009年2期)2009-03-27 04:33:44
數(shù)字社區(qū)&智能家居(2009年12期)2009-02-03 07:50:48
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32