一種ARM+DSP架構(gòu)的小型無人機(jī)飛行控制平臺(tái)軟件設(shè)計(jì)
2014-01-15 09:59:48雷金奎
電子設(shè)計(jì)工程 2014年15期
雷金奎, 趙 晨, 陳 浩
(1.西北工業(yè)大學(xué) 第365研究所,陜西 西安 710065;2.西北工業(yè)大學(xué) 陜西 西安 710072)
近年來,無人機(jī)[1]以其獨(dú)有的低成本、低損耗、零傷亡、可重復(fù)使用和高機(jī)動(dòng)等優(yōu)勢(shì),在軍用和民用領(lǐng)域的應(yīng)用范圍不斷擴(kuò)大,使得人們對(duì)無人機(jī)提出了更高的要求,因此作為無人機(jī)核心的飛行控制器的研究也越來越受到重視。高精度要求無人機(jī)控制系統(tǒng)的精度高,穩(wěn)定性好,能適應(yīng)復(fù)雜的環(huán)境,計(jì)算速度快,精度高[2],小型化則對(duì)控制系統(tǒng)的重量和體積提出了更高的要求。此外,還要具備實(shí)時(shí)、可靠的特點(diǎn)。
1 飛控平臺(tái)概述
本設(shè)計(jì)的無人機(jī)飛行控制平臺(tái)是基于ARM+DSP雙處理器協(xié)同工作來實(shí)現(xiàn)的,總體結(jié)構(gòu)圖如圖1所示。平臺(tái)選用SAMSUNG公司的ARM9處理器S3C2440作為主處理器,選用TI公司的DSP處理器TMS320F2812作為從處理器。雙口RAM芯片IDT7028L實(shí)現(xiàn)雙處理器之間的通訊,AD7490芯片將機(jī)載傳感器采集的信號(hào)由模擬量轉(zhuǎn)換為數(shù)字量,AD5628芯片用于輸出模擬控制量。平臺(tái)外擴(kuò)32M SDRAM,8路串口通信電路,具有30路離散I/O口,JTAG調(diào)試接口。主要實(shí)現(xiàn)的功能:
1)ARM主處理器采集各傳感器信號(hào),包括角速度、高度、飛行器姿態(tài)等參數(shù),經(jīng)調(diào)理電路濾除干擾后送入A/D轉(zhuǎn)換電路,將轉(zhuǎn)換后的數(shù)字量存入雙口RAM。
2)DSP從處理器通過雙口RAM獲取數(shù)據(jù),進(jìn)行控制律解算,產(chǎn)生PWM控制信號(hào)送入舵機(jī),保證無人機(jī)平穩(wěn)飛行。
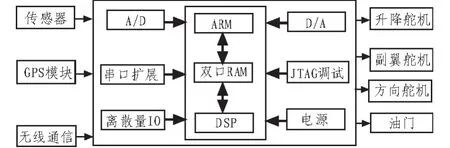
圖1 系統(tǒng)總體結(jié)構(gòu)圖Fig.1 Structure diagram of the small UAV flight platform
2 軟件設(shè)計(jì)
根據(jù)平臺(tái)任務(wù)劃分,分別對(duì)ARM、DSP處理器進(jìn)行軟件設(shè)計(jì)。針對(duì)ARM主處理器需要完成U-boot內(nèi)核引導(dǎo)程序、Linux內(nèi)核、yaffs根文件系統(tǒng)的移植,建立起嵌入式ARMLinux系統(tǒng),基于此開發(fā)環(huán)境進(jìn)行驅(qū)動(dòng)及應(yīng)用程序開發(fā)。針對(duì)DSP從處理器主要基于CCS集成開發(fā)環(huán)境,使用C語(yǔ)言與匯編語(yǔ)言完成數(shù)據(jù)處理。
ARM處理器主要包括初始化模塊、數(shù)據(jù)采集模塊,其中數(shù)據(jù)采集模塊包括A/D轉(zhuǎn)換、串行通訊和無線通訊等。初始化模塊主要完成對(duì)ARM系統(tǒng)時(shí)鐘、中斷寄存器、外部存儲(chǔ)器的操作,保證串口、AD7490等的正常工作。數(shù)據(jù)采集模塊使用計(jì)數(shù)方式產(chǎn)生不同時(shí)間間隔的定時(shí)中斷,在中斷服務(wù)程序中完成對(duì)A/D轉(zhuǎn)換、串口等數(shù)據(jù)的采集并存入雙口RAM IDT7028L。
DSP處理器主要包括初始化模塊、控制律解算模塊。初始化模塊保證DSP系統(tǒng)正常工作。為滿足系統(tǒng)的實(shí)時(shí)性要求,控制律解算模塊通過設(shè)置合理的定時(shí)間隔讀取雙口RAM中的數(shù)據(jù),進(jìn)行控制律解算,向舵機(jī)輸出PWM控制信號(hào)。在解算過程中考慮到A/D轉(zhuǎn)換、串行通訊、無線傳輸具有不同的刷新速率,刷新速率較慢的數(shù)據(jù)使用歷史值作為當(dāng)前值。軟件設(shè)計(jì)流程圖如圖2所示。
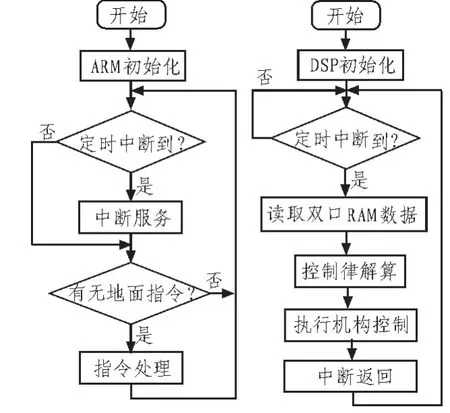
圖2 軟件設(shè)計(jì)流程圖Fig.2 Flow chart of the software design
3 關(guān)鍵技術(shù)解決
飛控平臺(tái)軟件設(shè)計(jì)的關(guān)鍵是移植Linux操作系統(tǒng),并在此基礎(chǔ)上實(shí)現(xiàn)底層驅(qū)動(dòng)的開發(fā)。
3.1 Linux系統(tǒng)移植
3.1.1 Bootloader的移植
文中選用U-boot-1.1.6作為系統(tǒng)的Bootloader,在源碼基礎(chǔ)上修改添加開發(fā)板硬件相關(guān)文件、配置選項(xiàng)。首先修改最頂層Makefile,在其中添加如下兩行:
smdk2440_config:unconfig
@$ (MKCONFIG) $ (@:_CONFIG= ) arm arm920t smdk2440 NULL s3c24x0
修改board/smdk2440/lowlevel_init.S完成SDRAM的配置,修改board_init函數(shù)完成對(duì)S3C2440系統(tǒng)時(shí)鐘的改動(dòng),修改board/s3c2440/flash.c完成對(duì)Nor Flash的支持,修改driver/nand/nand.c等驅(qū)動(dòng)函數(shù)完成對(duì)Nand Flash等設(shè)備的支持,增加串口xmodem協(xié)議以便使用SecureCRT工具,增加“nand write”和“nand write.yaffs”等命令以燒寫內(nèi)核和 yaffs文件系統(tǒng)映像文件。 執(zhí)行“make s3c2440_config”和“make all”命令,對(duì)U-boot重新編譯,生成二進(jìn)制映像文件u-boot.bin,將其燒寫進(jìn)Nor Flash。
3.1.2 內(nèi)核的移植
首先配置內(nèi)核,確保內(nèi)核可以正確編譯。修改頂層Makefile,將如下代碼:
ARCH ?=$(SUBARCH)
CROSS_COMPILE?=
改為:
ARCH ?=arm
CROSS_COMPILE?=arm-linux-
根據(jù)U-boot對(duì)Flash的分區(qū)情況修改linux2.6.32/arch/
arm/mach-s3c2440/目錄下的mach-smdk2440.c等文件。修改drivers/mtd/nand下的s3c2440.c文件和arch/arm/plats3c24xx下的common-smdk.c文件,將相關(guān)設(shè)備注冊(cè)進(jìn)內(nèi)核,完成MTD分區(qū)。將yaffs2代碼通過腳本文件patch-der.sh給內(nèi)核打補(bǔ)丁的方式加入內(nèi)核。用make menuconfig命令進(jìn)入內(nèi)核配置界面,對(duì)內(nèi)核進(jìn)行裁剪,然后執(zhí)行“make dep”“make clean”“make zImage”命令生成內(nèi)核映像文件zImage。當(dāng)U-boot啟動(dòng)后就可以將內(nèi)核燒寫進(jìn)Nand Flash。
3.1.3 根文件系統(tǒng)的移植
鑒于訪問速度快的優(yōu)點(diǎn),選擇YAFFS文件系統(tǒng)進(jìn)行移植。利用Busybox-1.7.0來創(chuàng)建/bin、/sbin等目錄下的可執(zhí)行文件,并在/dev目錄下創(chuàng)建必需的設(shè)備節(jié)點(diǎn)、在/etc目錄下創(chuàng)建必需配置文件、在/lib目錄下包含庫(kù)文件。
在Busybox-1.7.0目錄下執(zhí)行“make menuconfig”命令可進(jìn)入配置界面對(duì)Busybox進(jìn)行相關(guān)配置。修改Busybox根目錄的Makefile,使用交叉編譯器,修改后為:
ARCH ?=arm
CROSS_COMPILE?=arm-linux-
然后執(zhí)行 “make”命令編譯Busybox,執(zhí)行命令“make CONFIG_PREFIX=dir_path install”將其安裝在指定目錄dir_path下,再加載glibc庫(kù)。創(chuàng)建etc目錄下的etc/inittab、etc/init.d/rcS和etc/fstab文件,在/dev目錄下靜態(tài)創(chuàng)建各種節(jié)點(diǎn),如/dev/mtdblock*、/dev/ttySAC*等。使用mdev初始化/dev和動(dòng)態(tài)更新,修改etc/fstab和etc/init.d/rcS使內(nèi)核啟動(dòng)時(shí)自動(dòng)運(yùn)行 mdev。 最 后 創(chuàng) 建 proc、mnt等 空 目 錄 。 使 用 命 令“mkyaffsimage”創(chuàng)建YAFFS文件系統(tǒng)映像文件,進(jìn)而燒寫到目標(biāo)板。
3.2 底層驅(qū)動(dòng)的實(shí)現(xiàn)
3.2.1 AD7490驅(qū)動(dòng)的實(shí)現(xiàn)
AD7490作為字符設(shè)備,其讀寫是以字節(jié)為單位的,采用可加載模塊化機(jī)制來開發(fā)設(shè)備驅(qū)動(dòng)程序。首先對(duì)設(shè)備進(jìn)行初始化,AD7490設(shè)備的初始化包括兩部分,一是對(duì)SPI工作方式、各控制寄存器和模式寄存器等配置參數(shù),并將PIO配置為引腳外設(shè)控制;二是完成設(shè)備驅(qū)動(dòng)程序向Linux內(nèi)核注冊(cè),調(diào)用函數(shù)register_chrdev()實(shí)現(xiàn)驅(qū)動(dòng)模塊的注冊(cè),調(diào)用函數(shù)unregiste_chrdev()實(shí)現(xiàn)驅(qū)動(dòng)模塊注銷。
對(duì)于字符設(shè)備驅(qū)動(dòng)程序是通過file_operations結(jié)構(gòu)體中的成員函數(shù)實(shí)現(xiàn)對(duì)Linux的系統(tǒng)調(diào)用的。file_operations結(jié)構(gòu)體如下:
static struct file_operations AD7490_fops={
.owner= THIS_MODULE;
.llseek= NULL;
.read= ad7490_rd;
.write= ad7490_wr;
.open= ad7490_open;
.release=ad7490_close;
};
構(gòu)造file_operations結(jié)構(gòu)中用到的各個(gè)成員函數(shù),每個(gè)成員都對(duì)應(yīng)一個(gè)系統(tǒng)調(diào)用,當(dāng)用戶操作設(shè)備文件時(shí)系統(tǒng)調(diào)用通過設(shè)備文件的主設(shè)備號(hào)找到相應(yīng)設(shè)備驅(qū)動(dòng)程序,再通過file_operations中相應(yīng)函數(shù)指針,由該函數(shù)進(jìn)行相應(yīng)控制。
最后編寫Makefile文件,執(zhí)行“make”命令進(jìn)行編譯,生成可執(zhí)行的.ko文件。編譯成功后在目標(biāo)板的映射目錄下執(zhí)行“insmod”命令進(jìn)行動(dòng)態(tài)加載,執(zhí)行“rmmod”命令實(shí)現(xiàn)動(dòng)態(tài)卸載。驅(qū)動(dòng)程序加載后,還需編寫A/D測(cè)試程序來驗(yàn)證驅(qū)動(dòng)程序是否實(shí)現(xiàn)了相應(yīng)功能。經(jīng)驗(yàn)證,該驅(qū)動(dòng)成功實(shí)現(xiàn)了預(yù)期功能。
3.2.2 IDT7028L驅(qū)動(dòng)的實(shí)現(xiàn)
將雙口RAM IDT7028L作為塊設(shè)備編寫驅(qū)動(dòng)程序,利用一塊系統(tǒng)內(nèi)存作為緩沖區(qū),當(dāng)用戶進(jìn)程對(duì)設(shè)備進(jìn)行讀寫請(qǐng)求時(shí)驅(qū)動(dòng)程序先查看緩沖區(qū)內(nèi)容,若能滿足要求就返回相應(yīng)數(shù)據(jù),否則就調(diào)用相應(yīng)的請(qǐng)求函數(shù)進(jìn)行實(shí)際的I/O操作。
首先對(duì)雙口RAM進(jìn)行初始化,配置寄存器、分配地址資源并初始化數(shù)據(jù)結(jié)構(gòu)、申請(qǐng)中斷和注冊(cè)設(shè)備[4]。調(diào)用函數(shù)register_blkdev()實(shí)現(xiàn)驅(qū)動(dòng)注冊(cè),不使用請(qǐng)求隊(duì)列而是使用制造請(qǐng)求的方式實(shí)現(xiàn)I/O請(qǐng)求處理,分配gendisk,初始化gendisk,添加gendisk到系統(tǒng)中,調(diào)用函數(shù)unregister_blkdev()實(shí)現(xiàn)驅(qū)動(dòng)注銷。
類似于字符設(shè)備驅(qū)動(dòng)中的file_operations結(jié)構(gòu)體,在塊設(shè)備驅(qū)動(dòng)中有block_device_operations結(jié)構(gòu)體。定義結(jié)構(gòu)體如下:
static struct block_device_operations IDT7028L_fops={.owner= THIS_MODULE;
.open= idt7028_open;
.release=idt7028_close;
.ioctl= idt7028_ioctl;
.media_changed= idt7028_media_changed;
.revalidate_disk=idt7028_revalidate_disk;
.getgeo=idt7028_getgeo;
};
實(shí)現(xiàn)block_device_operations結(jié)構(gòu)體中的各個(gè)函數(shù),編寫Makefile文件,編譯、加載該驅(qū)動(dòng)模塊。經(jīng)測(cè)試程序驗(yàn)證,該驅(qū)動(dòng)成功實(shí)現(xiàn)了預(yù)期功能。
4 結(jié) 論
文中研究了ARM+DSP架構(gòu)的小型無人機(jī)飛行控制平臺(tái)軟件設(shè)計(jì),分析了系統(tǒng)功能模塊,給出了系統(tǒng)軟件設(shè)計(jì)流程和關(guān)鍵技術(shù)的解決方法。實(shí)踐證明該方案合理可行,軟件可靠性高,系統(tǒng)具有抗干擾能力強(qiáng)、實(shí)時(shí)處理效果好的優(yōu)點(diǎn)。
[1]張小林,趙宇博.新一代高性能無人機(jī)飛控系統(tǒng)的研究與設(shè)計(jì)[J].計(jì)算機(jī)測(cè)量與控制,2010,18(11):2588-2590.ZHANG Xiao-lin,ZHAO Yu-bo.Research and design of new generation high performance unmanned aerial vehicle flight controlsystem[J].Computer Measurement& Control,2010,18(11):2588-2590.
[2]王昱輝,雷金奎.基于SmartFusion的無人機(jī)飛行控制系統(tǒng)設(shè)計(jì)[J].現(xiàn)代電子技術(shù),2012,35(10):129-131.WANG Yi-hui,LEI Jin-kui.Design of smartfusion-based flight control system forUAVs[J].Modern Electronics Technique,2012,35(10):129-131.
[3]楊小兵.基于雙ARM的飛控計(jì)算機(jī)核心系統(tǒng)的研究與設(shè)計(jì)[D].南京:南京航空航天大學(xué),2012.
[4]孫習(xí)波,陽(yáng)富民.嵌入式系統(tǒng)雙口RAM應(yīng)用及驅(qū)動(dòng)開發(fā)[J].計(jì)算機(jī)工程與設(shè)計(jì),2005,26(8):2257-2259.SUN Xi-bo,YANG Fu-min.Application and driver development of dual-port ram in embedded system[J]. Computer Engineering and Design,2005,26(8):2257-2259.
[5]張綺文.ARM嵌入式常用模塊與綜合系統(tǒng)設(shè)計(jì)實(shí)例精講[M].北京:電子工業(yè)出版社,2007.
[6]蘇奎峰.TMS320F2812原理與開發(fā)[M].北京:電子工業(yè)出版社,2005.
猜你喜歡
中國(guó)特種設(shè)備安全(2022年6期)2022-09-20 02:52:28
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
經(jīng)濟(jì)技術(shù)協(xié)作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
工業(yè)設(shè)計(jì)(2016年12期)2016-04-16 02:52:00
