面向重建的結(jié)構(gòu)光中心快速提取方法*
2014-01-10 01:13:22揭平良呂文閣謝慶華張湘?zhèn)?/span>廣東工業(yè)大學(xué)機電工程學(xué)院廣東廣州510006
機電工程技術(shù) 2014年5期
關(guān)鍵詞:方法
揭平良,呂文閣,謝慶華,張湘?zhèn)ィ◤V東工業(yè)大學(xué)機電工程學(xué)院,廣東廣州 510006)
面向重建的結(jié)構(gòu)光中心快速提取方法*
揭平良,呂文閣,謝慶華,張湘?zhèn)?br/>(廣東工業(yè)大學(xué)機電工程學(xué)院,廣東廣州 510006)
在逆向工程的非接觸光學(xué)測量系統(tǒng)中,準確、快速提取光條中心是保證獲取實物表面形狀數(shù)據(jù)精度和算法實時性的關(guān)鍵因素。根據(jù)激光強度符合高斯分布和光條邊界的連續(xù)性特點,對傳統(tǒng)的光條中心提取方法進行改進。考慮光條在圖像中的形狀和分布特征,通過從圖像的不同位置和方向掃描得到光條中心,并比較了不同掃描方法所用的時間。利用本文方法重建了動車輪轂的三維輪廓。實驗結(jié)果表明,本文方法比傳統(tǒng)方法有明顯提高,具有較強的實用性。
逆向工程;光條中心提取;中心法;三維重構(gòu)
0 引言
根據(jù)實體輪廓生成幾何模型的方法稱為逆向工程[1]。逆向工程與現(xiàn)代設(shè)計密切相關(guān),已成為制造業(yè)產(chǎn)品開發(fā)中的重要手段。實物表面形狀數(shù)據(jù)的獲取是逆向工程的基礎(chǔ)。通常獲取實體表面形狀數(shù)據(jù)的方法分為兩大類,接觸式和非接觸式測量方法[2]。三坐標測量儀(coordinate measure ma?chine,CMM)是逆向工程中使用最為廣泛的傳統(tǒng)形狀測量設(shè)備,但它存需要一定的工作環(huán)境、速度慢、效率低且價格昂貴等弱點[3]。隨著計算機及光電技術(shù)的發(fā)展,光學(xué)式非接觸測量方法逐漸占據(jù)重要地位。近年來基于結(jié)構(gòu)光的非接觸三維測量技術(shù)得到了快速的發(fā)展,光切法(light-section method)[3]是近10年發(fā)展起來的一種非接觸測量方法。由于三維測量技術(shù)的主要任務(wù)是光條中心的準確、快速的提取,因此精確提取光條中心是提高測量精度的關(guān)鍵,光條中心的提取時間決定算法的實時性能。通常使用的光條中心提取方法有極值法、閾值法、重心法和高斯擬合法等[4-5],但這些方法在圖像數(shù)據(jù)較大時,很難達到實時性測量的要求。因此有必要研究一種快速提取光條中心的方法。
由于激光的高強度特點,一般條件下環(huán)境噪音對圖像中光條強度服從高斯分布這一特征影響很小[6]。因此光條的中心線理論上是圖像中光條的中心線,通常光條邊界點能量較弱難以提取,本文提出取距離峰值較近的像素為光條的虛擬邊界,并采用光條中心提取方法中的中心法提取光條中心。在處理的圖像數(shù)據(jù)較大時傳統(tǒng)的中心提取方法的算法時間復(fù)雜度較高。難以達到實時檢測的效果。本文基于光條邊界的連續(xù)性和光條在圖像中的位置、形狀等分布特征。結(jié)合光條邊界相鄰像素點之間的偏置關(guān)系,判斷圖像中每列(行)開始和終止掃描位置,根據(jù)不同的情況,使用24種方法實現(xiàn)光條中心的快速提取。并比較不同的兩種方法重構(gòu)動車輪轂?zāi)P汀?/p>
1 改進中心法
在實際操作中,提出了六組光條提取方法。為了說明各組中心提取方法,繪制圖1所示的光條中心每一列掃描示意圖。圖中共有八種從圖像的不同方向和不同位置掃描每一列光條的上、下邊界點的方式。在整幅圖像的光條提取中,根據(jù)光條位置、方向和光條質(zhì)量特征通過結(jié)合八種方法,具體有六種實現(xiàn)方法。
圖1 圖像掃描示意圖
(1)圖像的每一列按照圖1中的I方法從上往下掃描找到光條的上、下邊界點并計算出光條中心點。同理還可以從下往上掃描找到光條中心點。
(2)圖像的每一列按照V方法從上往下掃描找到光條上邊界點,接著從下往上掃描找到光條下邊界點,通過光條上、下邊界點計算出光條的中心點,同理可以改變V方法的掃描先后順序找出每一列的光條中心點。
(3)在圖像中先設(shè)定一個掃描開始上邊界,掃描開始上(下)邊界一般取大于光條的最大輪廓矩陣,從掃描開始上邊界的點位置按照II向下掃描找到第一列的光條中心,從第二列開始以后每一列掃描之前判斷上一列的光條上、下邊界點是否找到,如果找到,此時按照在前一列位置向上偏執(zhí)若干個像素點按照III方法掃描找到光條上、下邊界點并計算出光條中心點,如果沒有找到光條上、下邊界點或掃描開始上邊界點小于圖像上邊界點則按照II方法掃描找到該列光條的上、下邊界點并計算光條中心。以此方法找到每列的光條中心。同理可以從反方向掃描找到光條中心。
(4)從掃描開始上邊界點位置按照II方法向下掃描找到第一列上、下光條邊界并求出光條中心,從第二列開始以后每一列掃描之前判斷上一列的光條上、下邊界點是否找到,如果找到,此時判斷該掃描開始上邊界點與上一列的光條上邊界點的大小,如果掃描開始上邊界點大于上一列的光條上邊界點,則取掃描開始上邊界點等于上一列的光條上邊界點位置減去偏置的若干個像素按照IV方法找到光條上、下邊界點并計算出光條中心點。如果沒有找到上一列的光條上、下邊界點,此時的掃描開始上邊界等于圖像上邊界點并按照I方法計算出光條中心。同理可以從反方向掃描找到光條中心。
(5)從掃描開始上邊界點開始按照VI從上向下掃描找到第一列的光條上邊界點,從第二列開始以后每一列掃描之前判斷上列光條上邊界點是否找到,如果找到,此時的掃描開始上邊界點等于上一列的光條上邊界點的位置加上偏置的若干個像素按照VII方法從上往下掃描找到光條上邊界點。如果沒有找到光條上邊界點,此時的掃描開始上邊界點等于圖像上邊界點并按照VI方法從上往下找到光條上邊界點。同理反方向按照掃描開始下邊界點,按照VI和VII方法從下往上找到光條下邊界點。通過找到的光條上下邊界點計算出每一列光條中心點。同理可以先找到光條下邊界再找光條上邊界計算光條中心。
(6)從掃描開始上邊界點開始向下掃描如II方法找到第一列光條的中心點,從第二列開始以后每一列掃描之前判斷上列的光條中心點是否找到,如果找到,此時判斷該掃描開始上邊界點與上一列的光條上邊界點的大小,如果掃描開始上邊界點大于上一列的光條上邊界點,則取掃描開始上邊界點等于上一列的光條上邊界點位置減去偏置的若干個像素點并按照VIII掃描,如果沒有找到上一列的光條中心點,此時按照II掃描,通過找到光條上、下邊界點來計算出光條的中心點。同理可以先找到光條下邊界再找光條上邊界計算光條中心。
2 實驗方案
為了測試六組方法在各種復(fù)雜光條中心提取中的速度,構(gòu)造了如圖2、3所示的兩幅圖像,圖像中的光條有凹凸、間斷、內(nèi)孔等復(fù)雜特征,以模擬各種光條特征。圖2和圖3的大小分別為1024×768和768×1024像素。

圖2 測試圖像1
圖3 測試圖像2
上述6組方法中的每組在圖2中包含從上往下和從下往上兩種掃描方法,在圖3中包含從左向右和從右向左兩種掃描方法。因此總共有24種不同的方法。利用Visual C++和OPENCV編程實現(xiàn)上述24方法,并利用圖2和圖3圖像驗證方法的精度和速度,為了降低偶然因素影響,將每個方法運行1 000次后取平均值作為最后的實驗結(jié)果。見表1。

表1 方法在圖2、3中運行的平均時間ms
實驗結(jié)果表明:光條中心的輪廓和光條實際中心的輪廓有很好的一致性。圖4、5分別為在圖2使用方法3和在圖3使用方法2提取的光條中心,由表1實驗數(shù)據(jù)可得,相同的掃描方法在不同的圖像中的運算速度不同,且圖2由于圖像存儲格式對算法速度有利,速度比圖1明顯有優(yōu)勢。方法1在同一幅圖像中從下往上、從上往下、從左往右和從右往左掃描所對應(yīng)的算法時間度不同,特點是從圖像中靠近光條方向處開始掃描的速度大于反方向處開始掃描的速度。方法2和方法3在同一幅圖像上無論從哪個方向掃描所得的算法速度大致是一樣的。方法3、4、5、6的算法速度大致相同并且與方法1、2相比具有明顯的優(yōu)勢。方法3、4、6相比方法5運算速度要快一些。這在圖像數(shù)據(jù)較大時速度優(yōu)勢將更明顯。這與最初的使用不同的掃描方法尋找光條中心算法的速度不同和不同圖像使用不同的光條提取方法可以提高算法速度的想法得到很好的驗證,同時提出了六種可選擇的中心提取方法,為具有不同特征的光條中心提取提供了多種可選擇的快速方法。同時提取的精度可以達到像素級,可以滿足大部分圖像的光條中心提。
圖4 圖2的光條中心
圖5 圖3的光條中心
3 應(yīng)用實例
將光條提取方法運用于動車輪轂?zāi)P偷闹貥?gòu)項目中,圖6為需要重構(gòu)的動車1/4輪轂?zāi)P汀T撦嗇災(zāi)P偷陌霃綖?9 cm、高為4 cm。搭建實驗平臺如圖7所示,將輪轂?zāi)P头胖迷谶\動控制平臺上面,采用線激光,運動控制平臺以1 cm/s移動輪轂,并觸發(fā)AVT相機采集輪轂移動位置處的光條圖像。拍攝圖像格式為640×480灰度圖像。根據(jù)得到的光條圖像,使用本文中光條中心提取方法。通過相機標定、光條提取、三維重建得到圖8所示的輪廓三維圖。實驗結(jié)果表明重建的三維輪廓精度為1 mm。在該項目中采用方法1和4,方法4:單張圖像處理時間為0.256 ms。所有圖像處理的總時間為48.596 ms,方法1:單張圖像處理時間為1.375 ms,所有圖像處理的總時間為261.246 ms,結(jié)果表明選擇不同的掃描方法在圖像數(shù)據(jù)較大時改進的光條提取算法有明顯的優(yōu)勢。
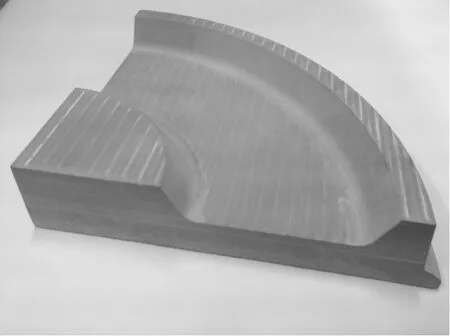
圖6 動車1/4輪轂?zāi)P?/p>
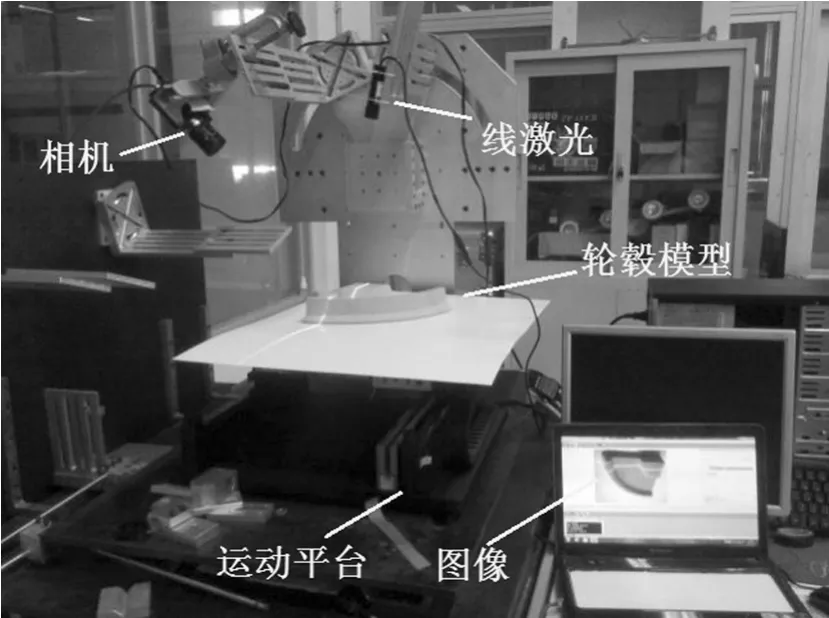
圖7 實驗平臺
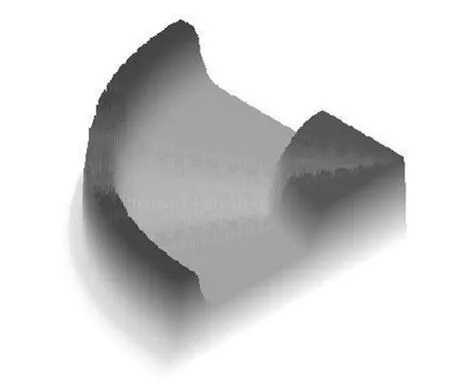
圖8 動車1/4輪轂輪廓重構(gòu)圖
4 結(jié)論
根據(jù)激光光強符合高斯分布,取距離峰值較近的灰度值為光條虛擬邊界,并利用光條中心提取中的中心法提取。根據(jù)圖像相鄰邊界的連續(xù)性,利用相鄰像素行(或列)的偏置掃描,通過從不同的方向掃描每行(或列)獲取光條中心。結(jié)合實際光條的特征使用24種方法具體實現(xiàn),并使用Visual C++和OPENCV編程測試不同方法的算法速度和提取光條的質(zhì)量。實驗結(jié)果表明,不同的掃描方法在同一圖像和不同的圖像上算法時間復(fù)雜度表現(xiàn)出較大的差異。在動車輪轂?zāi)P偷娜S重建項目中,使用該方法提取光條中心,實驗結(jié)果表明,利用方法4總時間比方法1少212.650 ms,運算速度達到了實時檢測的要求。并達到系統(tǒng)所需精度。本文中提出的快速光條提取方法在實時性要求比較高的場合下,具有較強的使用性。
[1]成思源,余國鑫,張湘?zhèn)?逆向系統(tǒng)曲面模型重建方法研究[J].計算機集成制造系統(tǒng),2008,14(10):1934-1939.
[2]楊雪榮,張湘?zhèn)ィ伤荚矗?基于可變形模型的光條紋中心提取方法研究[J].中國機械工程,2009,20(3):334-336.
[3]楊雪榮,張湘?zhèn)ィ伤荚矗?三坐標測量機與線結(jié)構(gòu)光傳感器集成系統(tǒng)的測量模型[J].中國機械工程,2009,20(9):1020-1023.
[4]雷海軍,李德華,王建永,等.一種結(jié)構(gòu)光條紋中心快速檢測方法[J].華中理工大學(xué)學(xué)報:自然科學(xué)版,2003,31(1):74-76.
[5]劉枝梅,鄧文怡,婁小平.結(jié)構(gòu)光測量系統(tǒng)中光條中心的提取算法[J].北京機械工業(yè)學(xué)院學(xué)報,2009,24(1):42-45.
[6]解則曉,辛悅向,金明光,等.光條亮度對線結(jié)構(gòu)光測量精度的影響[J].光學(xué)技術(shù),2008,34(12):52-54.
Reconstruction Based on Real-Time Extracting Light Strip Center Method
JIE Ping-liang,LV Wen-ge,XIE Qing-hua,ZHANG Xiang-wei
(College of Mechanical&Electronic Engineering,Guangdong University of Technology,Guangzhou 510006,China)
In the non-contact optical measurement system in reverse engineering,physical surface data accurate and rapid extraction laser stripe is a key factor to guarantee system precision and real-time of algorithms.The paper based on the laser intensity distribution conforms to the Gaussian distribution and the continuity border of laser stripe,improved the traditional laser stripe center extraction method, combined with the shape and distribution of the light in the image, Through scanning laser stripe center from a different position and orientation of the image and compare the times of different scanning method.Apply this method to rebuilding three-dimensional contour of the train hubcaps.Experimental results show that the method is significantly improved than the traditional method.This method has a strong practical.
reverse engineering;extracting light strip center;center method;three-dimensional reconstruction
TP751
A
1009-9492(2014)05-0061-04
10.3969/j.issn.1009-9492.2014.05.015
揭平良,男,1987年生,江西撫州人,碩士研究生。研究領(lǐng)域:機器視覺算法及應(yīng)用。
(編輯:向 飛)
*國家自然科學(xué)基金(編號:51276043);廣東省重大科技專項(編號:2009A080204006)
2014-03-24
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
