高架機動雷達總體結構設計與關鍵技術分析
2014-01-01 03:18:30陳亞峰
現代雷達 2014年3期
關鍵詞:設計
賀 鵬,陳亞峰
(南京電子技術研究所, 南京210039)
0 引言
現代高科技局部戰爭中,飛機低空和超低空突防、巡航導彈超低空襲擊成為空戰常用的攻擊方式,目前對低空、超低空飛行目標和巡航導彈的預警探測受到各國關注,也成為取得戰爭絕對主動權必須首先攻克的重要課題之一。高架機動雷達就是隨現代戰爭的需求應運而生的戰場監視雷達,它通過天線舉升機構將天線架設到一定高度來克服強地雜波和低空障礙物,提高其作用距離和范圍。同時,這種雷達具有較高的機動性,能夠進行快速的架設和撤收以及陣地轉移,因而有較強的生存能力。
針對高架機動雷達的主要結構特點,本文從系統布局優化技術、低風阻陣面結構技術、一體化輕型天線陣面技術、天線高架技術和系統機動性設計技術對高架機動雷達的結構總體設計進行了論述,通過多個實例、有限元分析與機構仿真分析探討了幾項關鍵技術的解決措施和方法。
1 高架機動雷達國內外發展現狀
高架機動雷達技術已廣泛應用于各種不同型號和功能的雷達中,國內近期研制的一種低空三坐標雷達由天線車和電站車兩個運輸單元組成,其中天線車上的舉升臂在兩個油缸的作用下到達豎直狀態,之后舉升臂以液壓驅動方式將天線升高至18 m,該系統具有很高的機動性,可在10 min之內完成部署。一種多站無源防空雷達由5個運輸單元組成,各單元均采用單車方案,天線通過電動舉升機構舉升至25 m,系統架設時間40 min,撤收時間30 min。國外具有代表性的高架機動雷達如:瑞典的“長頸鹿”系列雷達,其中“長頸鹿”100型機動雷達工作于G/H波段,雷達方艙上安裝一個折疊式天線桅桿,天線升高12 m,部署時間小于15 min;捷克ERA公司研制“維拉—E”是一部無源雷達,它由4個運輸單元組成,天線可升高至17 m,3個人可在60 min內完成雷達架設,并能抵御30m/s的大風。
從國內外的發展趨勢看,高架機動雷達的天線舉升高度、舉升載荷都有所提高,并朝著高機動方向發展。然而根據目前發展現狀,高架機動雷達主要存在兩方面的問題,即舉升高度與舉升載荷的矛盾,以及舉升高度和機動性的矛盾。例如:上述的低空三坐標雷達雖然架設高度達18 m,但天線質量受到限制而制約了雷達的威力范圍;“長頸鹿”系列機動性較高,但架設高度有限。
2 高架機動雷達結構總體設計
結構總體設計是雷達結構設計的源頭,其根本任務在于將各分系統進行集成設計。高架機動雷達結構總體設計的主要內容是將各松散的分系統有機的結合起來,進行合理的布局設計,解決關鍵技術,對整機和關鍵結構件進行仿真計算;雷達的環境適應性設計,就是滿足雷達的可靠性、維修性、安全性和人機工程設計要求。高架機動雷達結構總體設計的研究內容,如圖1所示。
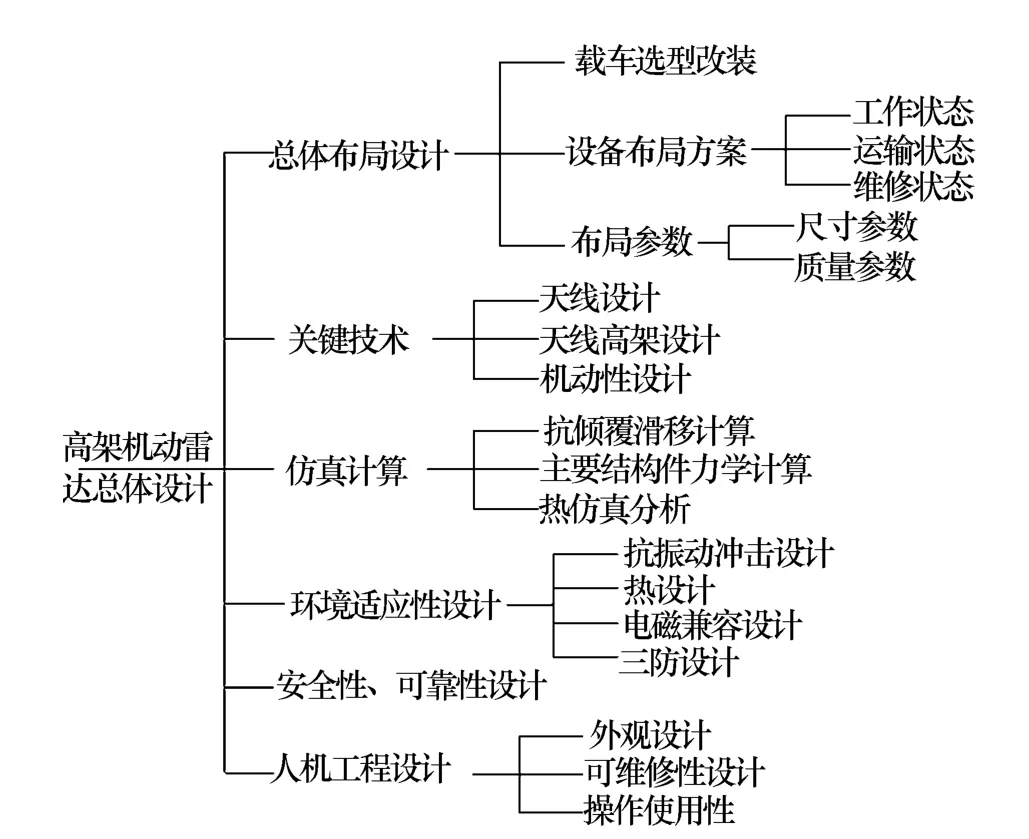
圖1 高架機動雷達總體結構設計研究內容
在總體布局設計中,布局方案原則上要從雷達的工作、運輸、維修三個方面綜合考慮,盡量使設備的集成度和空間利用率高。在高架工作狀態,布局設計應確保設備重心分配合理,天線設計三心合一,天線倒豎、舉升和轉動等動作安全可靠無干涉。在運輸狀態下,布局設計應滿足各種運輸方式的運輸界限,同時不改變原載車相關運輸參數。在維修狀態下,要設計好安全的維修路徑及維修空間,維修點應設計在可視可達的高度范圍內。此外,總體布局設計應結合雷達的環境適應性設計和人機工程設計進行,合理的布局應美觀大方,符合人機工程和環境適應性的要求。
前面提到高架機動雷達的發展面臨舉升高度與舉升載荷以及舉升高度和機動性的矛盾,要解決這兩個問題,需要從天線、舉升機構和雷達機動性三方面統籌考慮。因此,天線設計、天線的高架設計和機動性設計是高架機動雷達結構設計的三個重要方面,也是我們需要解決的關鍵技術。
3 高架機動雷達結構關鍵技術分析
3.1 天線設計
雷達在工作時天線處于一個居高臨下的位置,會受到來自各種環境負載的侵害,如風、結構自身質量、冰雪和溫度變化等都會以力和力矩的形式作用于天線,其中風和自身質量構成最主要的負載組合。因此,對于高架機動雷達來說,在滿足電信指標性能的前提下,一方面要減小風載荷,另一方面追求結構的輕型化、小型化設計是天線結構設計的重要任務。
3.1.1 減小風負載
天線的風載荷大小與天線的形狀、截面積以及風速等都有關系,此外還會受到雷達陣地所在地理區域的影響,風載荷大小的公式計算如下[1]

式中:βz和μz取值與天線所處的高度及地理區域有較大關系;μs和A分別為體型系數和迎風面積,與天線的設計有直接關系。天線外形盡可能設計成平滑的弧形狀,天線曲面、陣面及其背架力求高透空度將有助于減小μs。比如:將天線罩設計為圓柱形和球形,其μs值相比于平面外形分別減小1/3~1/2。為了最大程度減小迎風面積A,天線設備布局應結構緊湊,采用高度集成化、模塊化、一體化的設計,實現設備的高密度組裝。如一種相控陣雷達陣面采用一體化綜合網絡技術和模塊化設計的同時將微波、波控、電源三種網絡集成設計在一塊綜合背板上,代替傳統中采用電纜互聯的獨立微波、波控、電源網絡組件設計,從而實現天線陣面高集成、減小陣面尺寸及輕量化的要求。
3.1.2 天線的質量和重心控制
居高臨下的位置決定了天線質量和重心對系統穩定性的重大影響,因此,在不損害電性能和剛強度的前提下應堅持輕質量、低重心、無偏心或少偏心等設計原則。具體設計從以下3個方面考慮:
1)采用各種輕質的新型材料,有些航空領域材料可直接應用于雷達領域,如鋁鎂合金、鋁鋰合金、蜂窩復合材料、玻璃鋼材料、碳纖維復合材料、聚氨酯發泡填充材料等。一種球載雷達拋物面反射器內部結構采用蜂窩復合材料,內外蒙皮采用碳纖維,其中蜂窩密度控制在30 kg/m3左右,相比于其他金屬材料其質量大幅降低。
2)“三心”合一設計原則,即天線轉動中心、天線風力矩中心、天線重心合一,天線在高架工作狀態下,“三心”合一設計可顯著減小其動態晃動,提高系統工作穩定性,滿足高架高轉速要求。
3)應用先進的設計技術和手段。例如,預應力技術在建筑結構中已有廣泛應用,根據其基本思想同樣可以應用到天線結構設計中。圖2為一種相控陣天線采用預應力技術,1為天線骨架,2、3為左右預應力漲拉索,通過采用該技術天線質量由原1.6 t減為1.2 t。
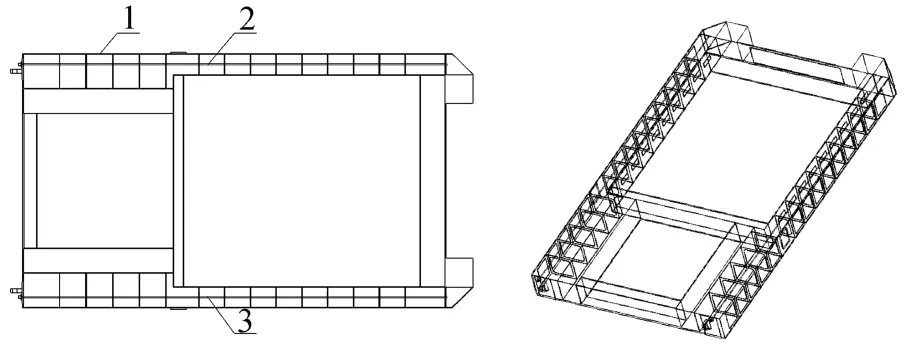
圖2 預應力相控陣天線示意圖
3.2 天線高架設計
天線高架是指天線由運輸狀態到工作狀態被舉升到一定的高度。升降機構作為天饋系統的承載和舉升平臺,在雷達工作中起到了舉足輕重的作用,因此,天線高架設計主要體現在升降機構上。升降機構的設計綜合運用機電液一體化技術,其設計要點和過程如圖3所示。升降機構一般采用兩種方式實現升降:曲臂升降和垂直升降。曲臂升降通常用于舉升載荷大但高度不高的場合,具有精度高、穩定性好的特點。相反,垂直升降可滿足舉升高度較高的要求,但精度較低,工作穩定性較差,通常要增加輔助拉緊裝置。圖4為一典型垂直升降機構,要求舉升質量400 kg,舉升高度23 m,并在25 m/s下穩定工作。為此,該升降機構采用電動驅動,根據舉升高度,設計7節套疊鋼管,各節下端設置絲杠螺母,電機通過減速器帶動絲杠旋轉使鋼管上下運動,節與節之間有鎖緊機構,上升時自動鎖緊,下降時自動解鎖,設置極限位置檢測,在升、降到位時實現自動停機。
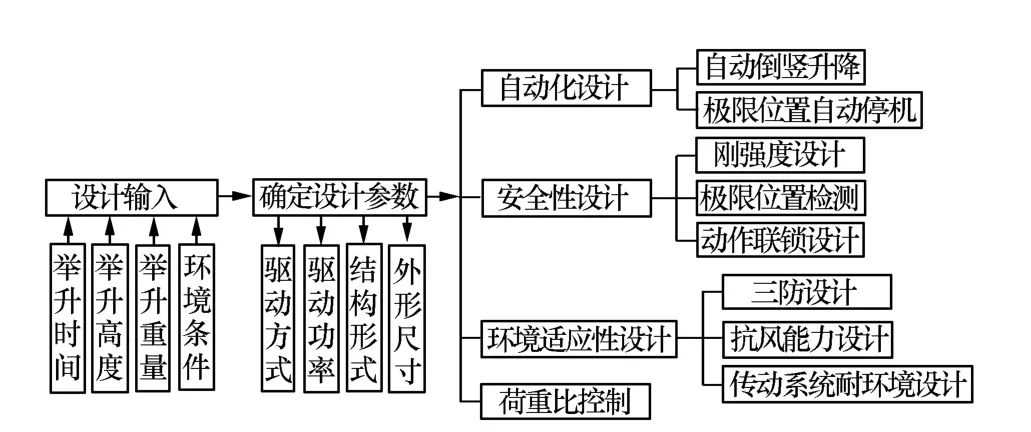
圖3 升降機構設計過程與要點
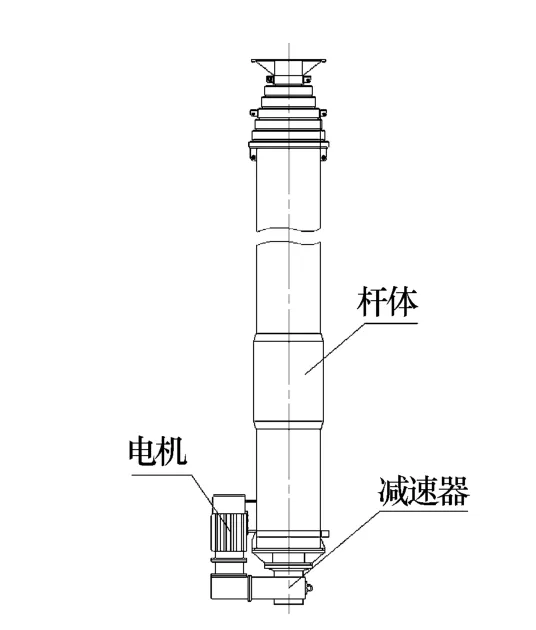
圖4 垂直升降機構示意圖
荷質比是指最大舉升載荷與升降機構自身質量之比,是結構設計的重要指標,在舉升載荷一定的情況下,荷質比越大,越有利于進一步提高其舉升高度和機動性。為了確定升降機構最佳外形尺寸及荷重比,根據圖4建立其舉高狀態下的有限元模型進行優化計算(如圖5所示),分7級建模,節與節重疊部位節點耦合,單元類型為PIPE16和MASS21,分別模擬鋼管和頂部質量、頂部施加等效風載荷。表1給出了該升降機構在不同風速和外形尺寸下的位移和應力,通過比較,升降機構直徑選用φ400 mm,能夠在自身質量和應力變形間取得較好的平衡。
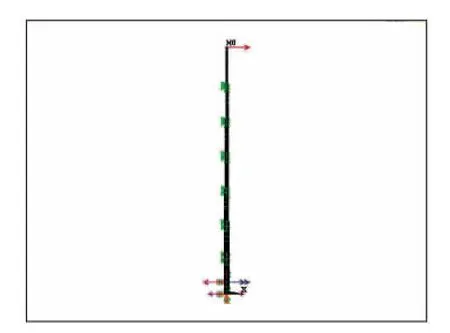
圖5 有限元模型(舉高狀態)
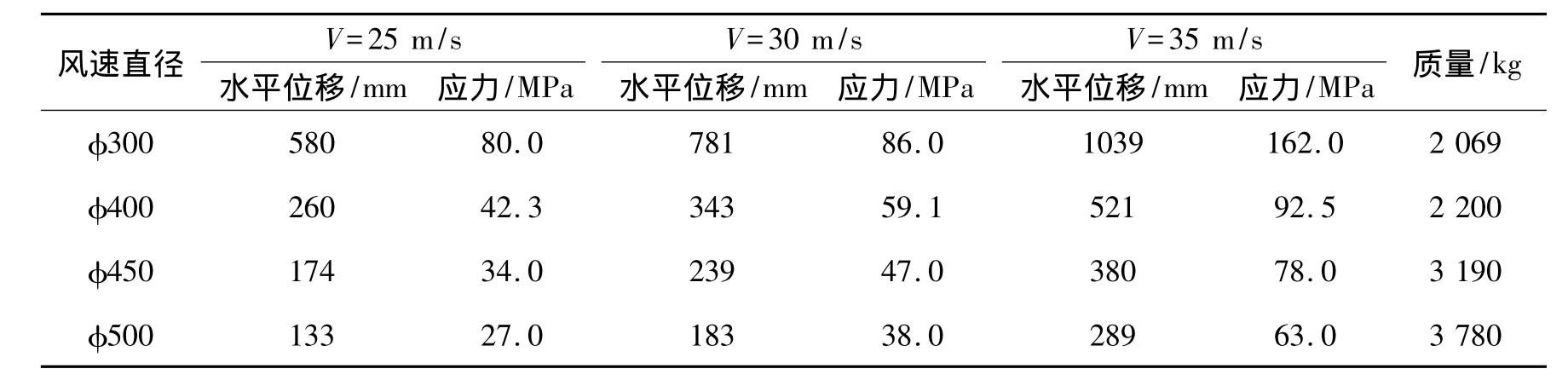
表1 不同工況和結構下的應力變形比較
3.3 機動性設計
雷達的機動性是指雷達快速隱蔽或轉移陣地的能力,包括雷達整機架撤時間、運輸及陣地適應性要求等[2]。相比于常規雷達,天線高架對高架機動雷達的機動性設計提出了更高的要求,在雷達的架設撤收過程中,天線的升降往往要花費較多的時間,因此縮短天線升降時間并對架設撤收操作進行統籌規劃對提高機動性有較大意義。下面以一種典型高架機動雷達為例(如圖6所示),闡述其機動性設計思路,該雷達天線升高至17 m,可在10 min內完成架撤,其機動性從運輸裝載和自動架設/撤收兩方面展開設計論證[3],如表2所示。
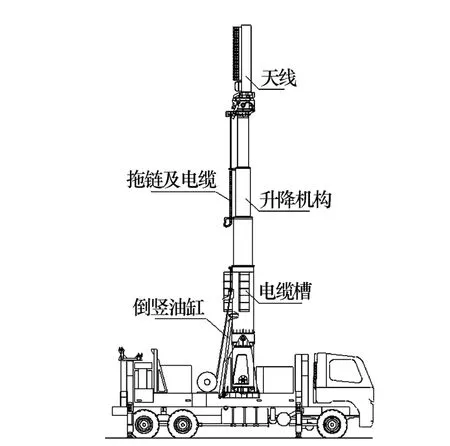
圖6 一種高架機動雷達
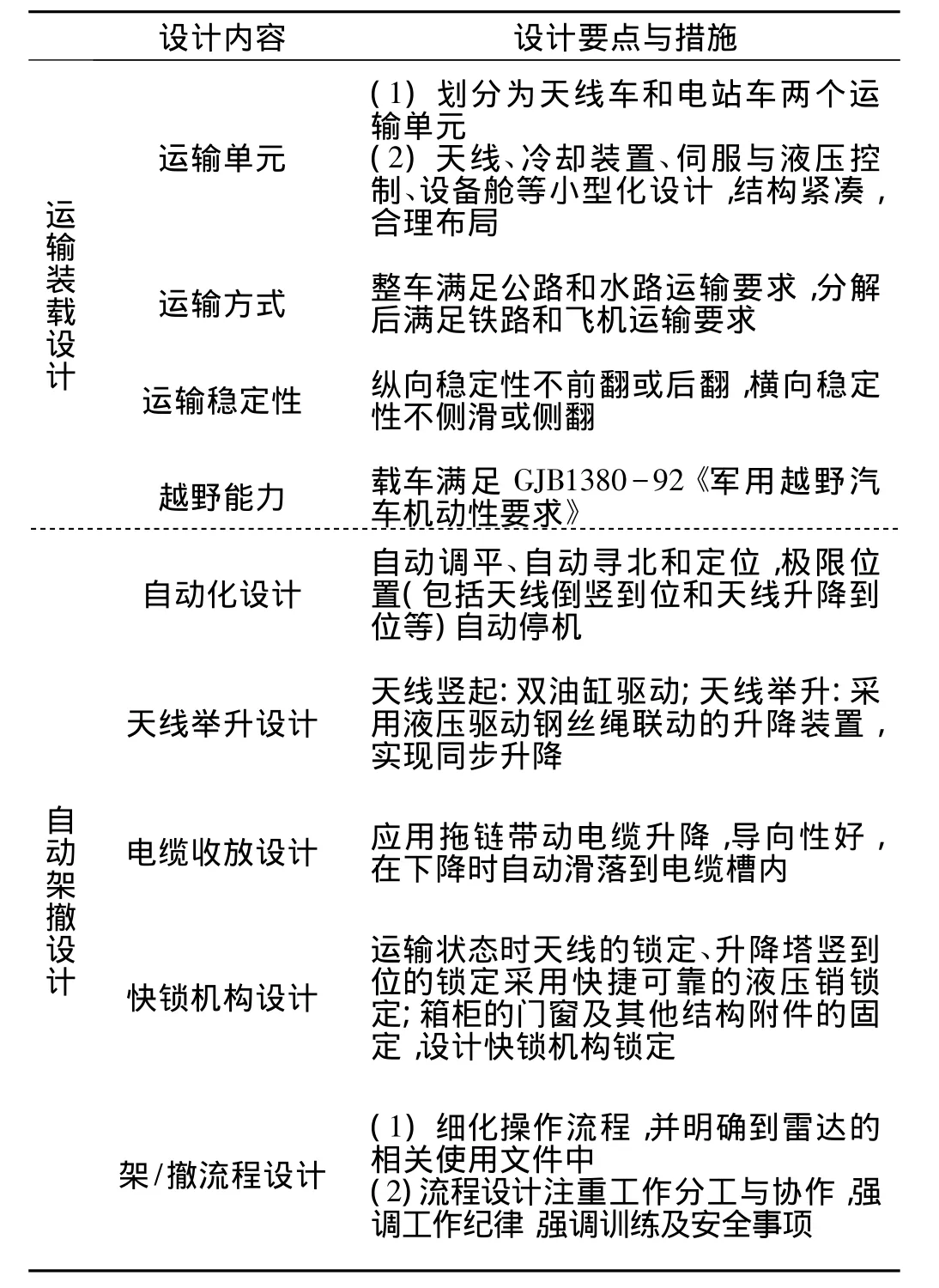
表2 機動性設計要點分析表
升降機構為4層空間箱型框架套疊結構,為了減少天線舉升時間,采用液壓驅動,鋼絲繩聯動的工作方式。即由液壓缸提供動力,各節設置若干組鋼絲繩滑輪組控制相鄰兩節的相對運動,工作時可使各節以相等的相對行程同步舉升,此時頂節對地運動速度最快,因而實現天線的快速舉升。在MATLAB中對升降機構的舉升過程進行仿真分析,舉升過程的建模包括液壓系統、鋼絲繩以及相鄰兩節之間的分離建模,其中液壓系統的建模仿真可以分析部件的運動曲線并了解液壓缸運動規律[4]。在15 m/s的風速條件下,液壓缸動力學仿真分析結果如圖7所示,根據圖中所示油缸運動規律,升降機構將在3 min左右達到舉升行程極限(液壓缸最大行程3 m),此時液壓缸的最大壓力約為16.8 MPa。
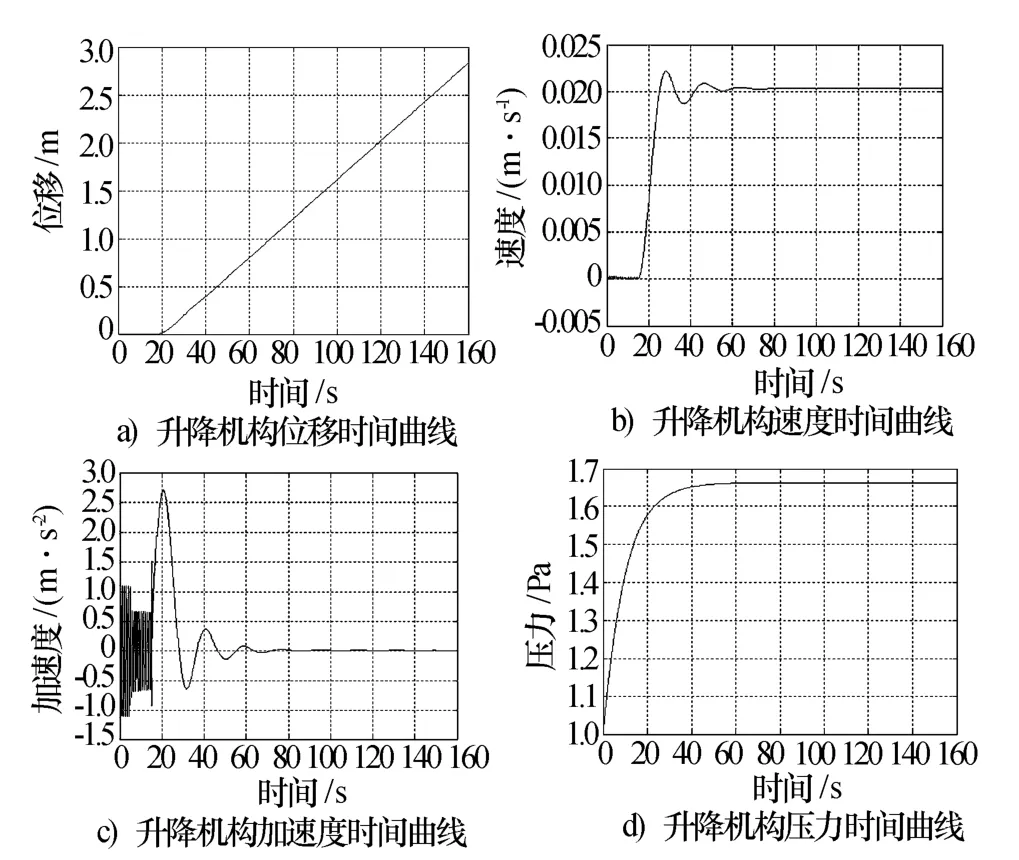
圖7 升降機構舉升過程仿真分析
4 結束語
高架機動雷達是近年來獲得迅速發展的戰場監視雷達,因其“高架”和“機動”的特點使其對于現代戰爭具有很強的適應能力。本文從系統布局優化技術、低風阻陣面結構技術、一體化輕型天線陣面技術、天線高架技術和系統機動性設計技術對高架機動雷達的結構總體設計進行了論述,并提出了高架機動雷達結構設計所面臨問題的解決方法,對類似雷達的研制工作具有一定參考意義。后續工作中,高架技術應該在舉升質量和舉升高度上有新的突破,這需要在升降機構的驅動方式、結構形式、裝配工藝以及試驗與仿真分析等方面開展深入研究。機動式系留氣球作為一種浮空器,具有承載質量大、升空高、機動性的特點,是解決高架問題的另一種有效平臺,如美國雷聲公司研制的JLENS氣球載預警系統,升空高度達5 000 m,有效載荷達3 000 kg。如果在氣球蒙皮上融合“隱身”技術,減少雷達波反射,還可有效提高系統生存能力[5]。
[1] 王肇民,馬人樂.塔式結構[M].北京:科學出版社,2004.Wang Zhaomin,Ma Renle.Tower structure[M].Beijing:Science Press,2004.
[2] 夏 勇,張增太.高機動雷達自動架撤系統的設計[J].現代雷達,2006,28(10):25-29,41.Xia Yong,Zhang Zengtai.Design of auto-erecting system for radar with high mobility[J].Modern Radar,2006,28(10):25-29,41.
[3] 胡長明.從結構設計角度探討車載對空情報雷達機動性、可靠性、維修性、保障性提高方法[J].電子機械工程,2005,21(1):1-4.Hu Changming.A study on improving the mobility,reliability,maintainability and supportability of vehicle-based air defense radar from structural design point of view[J].Electro-Mechanical Engineering,2005,21(1):1-4.
[4] 趙新舟,王常華.一種車載遠程三坐標引導雷達結構總體設計[J]. 現代雷達,2011,33(11):77-80.Zhao Xinzhou,Wang Changhua.A system structure design of vehicle-mounted 3D long-range guiding radar[J].Modern Radar,2011,33(11):77-80.
[5] 潘 峰,王林強,袁 飛.美國系留氣球載預警系統的發展現狀及趨勢分析[J].艦船電子對抗,2010,33(5):32-35.Pan Feng,Wang Linqiang,Yuan Fei.Analysis on developing status and trend of American tethered balloon-borne early warning system[J].Shipboard Electronic Countermeasure,2010,33(5):32-35.
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
