一種單兵雷達可展結構的誤差分析
2014-01-01 03:17:50王金偉唐寶富趙希芳蔡建國
現代雷達 2014年4期
關鍵詞:結構
王金偉,唐寶富,趙希芳,蔡建國
(1.南京電子技術研究所, 南京210039;2.東南大學國家預應力工程技術研究中心, 南京210096)
0 引言
現代戰爭瞬息萬變,對局部戰場戰術偵察的需求越來越強烈,單兵作戰雷達也應運而生。戰爭的快速部署和快速轉移的戰術特點,對單兵雷達從一個陣地的戰備狀態,經過快速撤收、越野行軍,進入另一個陣地進行快速架設,并轉入戰備狀態的能力提出了更高的要求[1]。因此,單兵雷達需滿足重量輕、可拼裝單元數量少的要求,對天線陣面結構進行巧妙設計,以達到快速安裝的目的[2]。
可展開結構具有多態性的特點,在展開過程中表現為機構的功能,在展開到位鎖定階段表現為結構的功能,21世紀以來,越來越多的被航空航天和軍事領域所采用。為了保證可展開結構順利可靠地展開,常采用含鉸間隙的連桿機構設計。可展開結構在展開過程中,由于鉸間隙的存在,會出現兩構件失去接觸的現象,即使在展開之后的使用過程中,構件會偏離原來的位置造成誤差,因此,可展結構在工作運行期間很難表現出較高的精度。從20世紀70年代開始,國內外學者[3-10]針對鉸間隙的機構動力學研究已經取得了大量成果,但結構動態特性研究方面相對較少。文獻[3]提出了球鉸間隙的誤差分析方法,將球鉸間隙轉化為連桿長度變化;文獻[4]提出了在連桿機構中可將鉸間隙轉化為虛擬的小連桿而存在;文獻[5]研究了航天可展開結構鉸間隙和重力對鉸接桁架結構動力學的影響;文獻[6]研究了鉸間隙和重力對鉸接空間結構阻尼的影響;文獻[7]首先對旋轉鉸和滑移鉸兩類典型連接鉸的物理模型進行了分析,得到鉸間隙間相互作用力的關系;然后,建立了它們的有限單元模型;最后,得到含鉸接間隙大型桁架式伸展機構的普遍非線性動力學方程;文獻[8]基于間隙鉸的接觸變形模式,建立了含間隙的可展結構動力學模型,得出了摩擦可能激起系統振動,增加系統動力學非線性的結論;文獻[9]論述了間隙非線性研究對新型航天器設計及在軌運行性能分析的重要意義,提出了待解決的若干含間隙空間機構動力學關鍵問題,其中包括空間機構間隙接觸非線性動力學分析設計、在軌運行機構穩定性分析,以及在軌含間隙空間機構動力學性能全局預測模擬的仿真軟件研制等;文獻[10]采用間隙鉸的非線性彈簧阻尼模型,構造可展結構動力學方程。分別對理想連接鉸、考慮鉸間隙以及考慮構件柔性等3種情況的典型可展結構進行動力學模擬。仿真結果表明,間隙和構件柔性對可展結構動力學性能有較大影響。
目前,研究鉸間隙問題的對象大多是少數桿件之間的間隙,而本文所提到的誤差分析方法涉及多根桿件的連接,機構更為復雜,同時也涉及到誤差的累加。本文通過對可展結構的機構誤差分析,建立了數學模型,得到具體的誤差分析方法,對提高機構精度提供一種理論依據。
1 單兵雷達與可展結構簡介
具有全向探測能力的一種單兵作戰雷達呈圓柱形,主要由柱面天線陣面、三角架、防雨布等部分組成。若干條有源線陣天線在圓周上均勻排列構成柱面天線陣面,如圖1所示。工作狀態時相鄰線陣天線間夾角精度、柱面天線陣面圓柱度要求高;運輸狀態時要求便于單兵攜帶,可拼裝單元數量少,架設和撤收時間短。
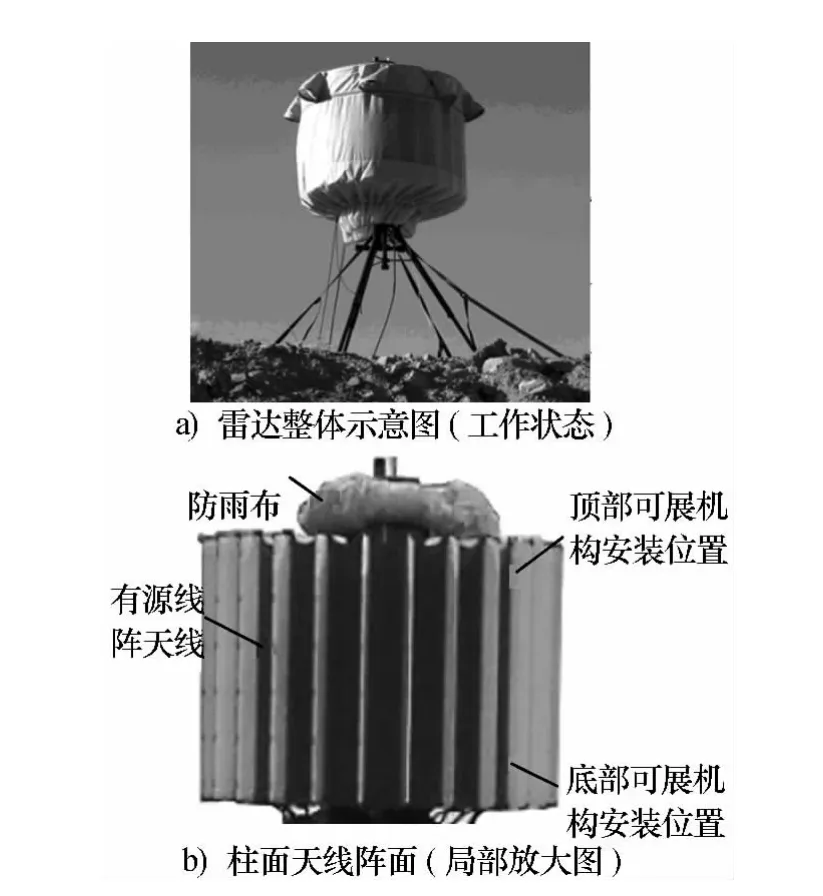
圖1 單兵天線陣面
該雷達的關鍵在于通過可展結構實現有源線陣天線的快速安裝并精確定位。此結構的可展部分由上下兩部分構成,上下兩部分可展結構分別展開,到位后分別固定掛板,再固定剪式鉸,形成一個整體,可展結構部分頂部和底部剪式鉸如圖2和圖3所示。
可展結構底部和頂部每隔1/4圓部分的線陣天線是被固定住的。展開前的底部如圖4所示,本結構的展開過程就是從圖4展開成圖2。
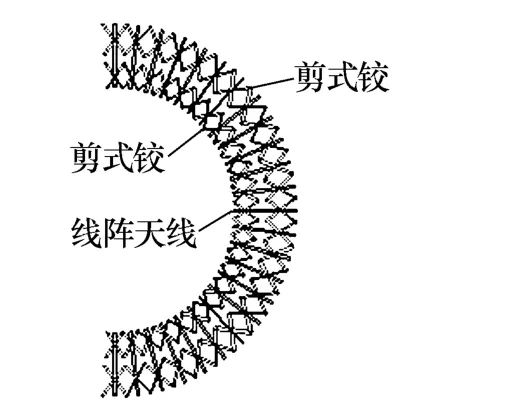
圖3 可展結構頂部(工作狀態)
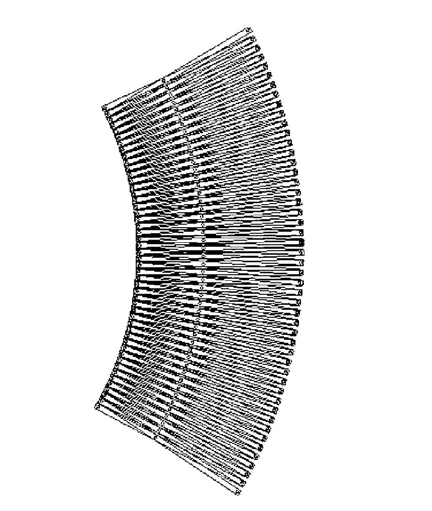
圖4 展開前的底部圖(運輸狀態)
2 誤差分析
2.1 誤差簡化
在可展開結構中,所有剪式鉸之間的連接以及剪式鉸與線陣天線之間的連接均是在線陣天線和剪式鉸上預留銷接孔,再用銷釘連接。理論計算中,銷釘的直徑尺寸與預留銷接孔直徑是一致的,但在實際設計過程中,要讓剪式鉸真正可展開轉動,則必須使銷釘的直徑尺寸與銷接孔有所差別,把這個誤差設為δ,即銷接孔的半徑與銷釘的半徑之差。
圖5所示為一根剪式鉸的端部,R表示銷接孔半徑,r表示銷釘半徑,從圖中可以看出,δ是銷接孔半徑和銷釘半徑之差,將其稱為孔隙誤差,如果沒有孔隙誤差,剪式鉸的銷接孔中心點在展開之后會在一個準確的位置,但是由于孔隙誤差的存在,使得剪式鉸可以在此間隙范圍內運動,此間隙范圍導致了剪式鉸位置的變化,同時也會引起線陣天線位置的變化。由圖5可以看出,如果沒有空隙而把銷釘和銷接孔之間的半徑差δ作為剪式鉸一端能伸縮的范圍,可以把各處連接位置的變化簡化為各個桿之間的長度變化,而變化量即為±δ,由于要計算線陣天線位置的變化,可以將問題先簡化為由桿長的變化而引起的線陣天線位置變化。
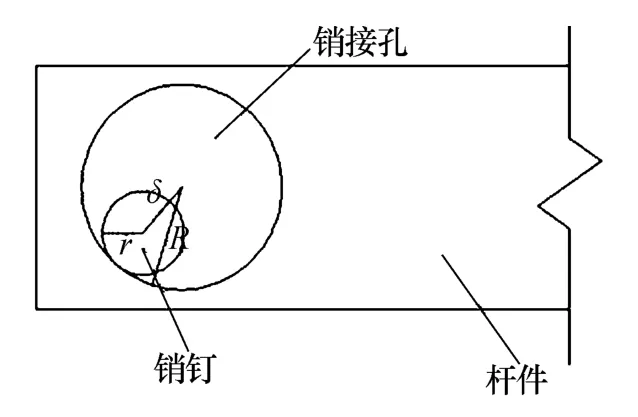
圖5 剪式鉸的端部
圖6所示為一根剪式鉸的端點繞著原來的位置以δ為半徑變化的示意圖。由于可展部分有上下兩個部分組成,在底部通過桿長的變化可以計算出下一個線陣天線上的相應剪式鉸的點的位置,而在頂部通過剪式鉸桿長的變化同樣也可以算出下一個線陣天線上兩個相應剪式鉸的點的位置,由這三個點的位置可以確定線陣天線的位置。
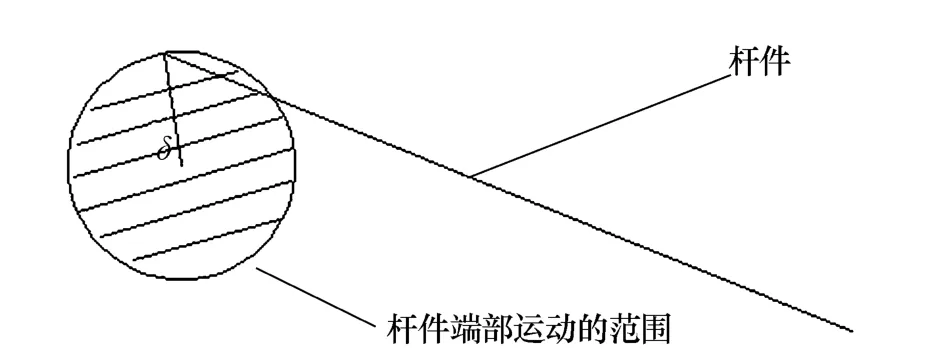
圖6 桿件端部運動示意圖
2.2 單元誤差分析
圖7所示結構為一底部剪式鉸單元,在底部剪式鉸單元中,由桿長l1和l2的變化可以得到相鄰于固定線陣天線的另一塊線陣天線同剪式鉸之間的交點C1的坐標值。同理,在頂部的剪式鉸中,一個單元有兩個四連桿機構,因此,可以通過桿長變化確定對應于C1點的C2和C3點,這樣由線陣天線上邊緣直線上的C2和C3點以及線陣天線下邊緣直線上的C1點就可以確定線陣天線平面所在的位置了。
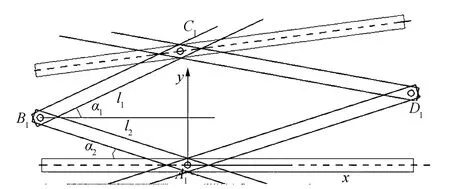
圖7 單元示意圖
由圖7可知,C1點的坐標可以用剪式鉸中的桿長l1、l2以及兩桿與固定的線陣天線之間的夾角α1、α2來確定,C1(l1'cos(α1')-l2'cos(α2'),l1'sin(α1')+l2'sin(α2')),以圖中所示 A1點為原點,x軸和 y軸建立坐標系。
先將剪式鉸的一個角A1B1C1作為定值,可得到α1同α2的關系。設從圓形底板中心到B1點的距離為n1,由于圖7所示的單元一共有N份。因此,每一個單元所對應的圓心角為360°/N,由正弦定理可以得到
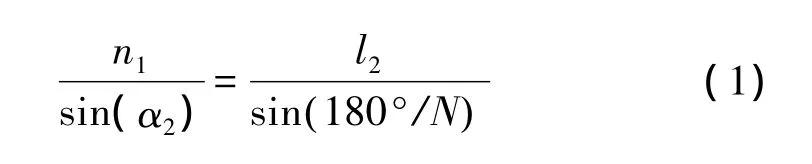
由幾何關系可以得到

式中:α1'和a2'分別為考慮誤差之后變化中的 α1和α2。
l2'是考慮誤差時的桿長,l2'同a2'的關系可以通過以下幾個方程的聯立得到。l2桿上卯孔中心繞原中心位置以制造誤差δ為半徑做圓周運動的軌跡公式
式中:xB1'和yB1'表示的是考慮誤差之后B1點變化的軌跡坐標,而xB1和yB1則是不考慮誤差時B1點的位置坐標,由前面的分析可知,l2'∈(l2-δ,l2+δ)。由以上公式聯立可得
在得到這個表達式之后,我們發現B點的坐標里的未知量僅剩l1'與l2',在給出l1'和l2'的確切變化范圍之后,即可進行求解。
2.3 整體結構誤差分析
計算出線陣天線變化最大值的位置之后,在CAD軟件中,將變化之后的線陣天線位置作為新的坐標系的x軸,垂直于它的作為y軸,用每個點相對位置的變化可以得到下一塊線陣天線的位置的變化,由于1/4處是固定的,因此,我們可以得到距離下一個1/4處最近的線陣天線位移量變化最大。
3 誤差計算
3.1 單元制造誤差計算
在該雷達可展結構的計算中,我們將誤差δ分別取0.03 mm,0.1 mm和0.2 mm。其中,0.03 mm是孔的制造誤差,0.1 mm是考慮磨損之后的誤差,而0.2 mm是考慮長期使用之后的誤差。先以0.1 mm為例進行計算。由于l1與l2的長度70.81 mm是已知的,當誤差取0.1 mm時,其長度在70.71 mm與70.91 mm之間變化,這時我們將這個區間分成200份,然后將兩根桿分別取這200份上的所有長度,這樣,就可以畫出200×200=40 000個C1點的坐標,用MATLAB軟件做出C1點的坐標圖,如圖8所示。
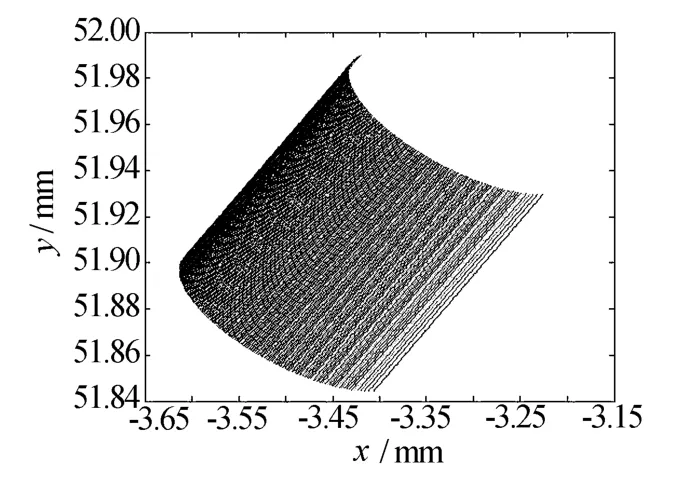
圖8 點C1坐標圖
同樣的方法,可以得出可展結構頂部的兩個剪式鉸中對應于C1點的C2點、C3點的坐標位置圖。計算坐標時,先將對應于A1點的A2、A3點作為原點,算出C2點和C3點之后再將x坐標分別減去38.09和加上58.78,得出的點的坐標如圖9和圖10所示。
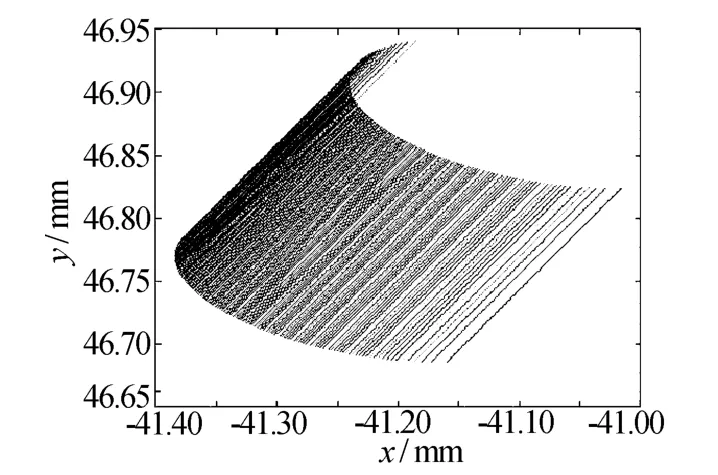
圖9 點C2坐標圖
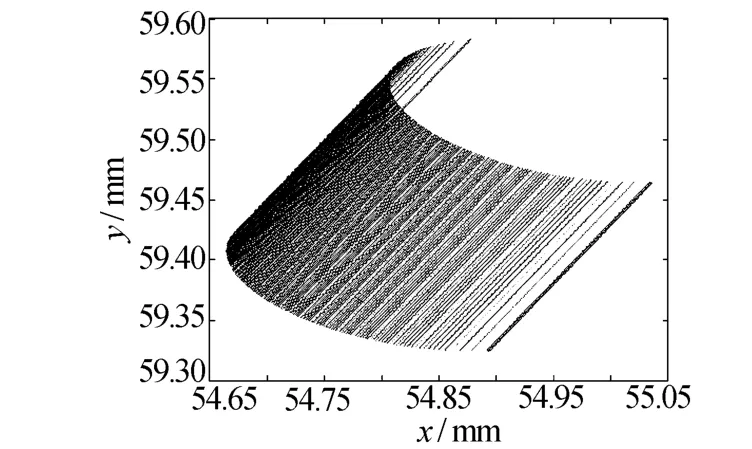
圖10 點C3坐標圖
得出 C1,C2,C3點的坐標集之后,需要在 C1,C2,C3坐標集中分別選擇一個點,用這三個點到C1,C2,C3原位置距離的平方和的最大值來確定線陣天線位置變化的最大值。由于從40 000個點中選擇時計算量過于龐大,可在計算時先分別將一些距離原來位置較近的點直接排除在外,從40 000個點中取50個以下距離原來位置最遠的點,分別對C1,C2,C3點進行上述操作,然后,在剩下的點中求出到原來位置距離的平方和最大的三個點。對于誤差為0.1 mm的情況,求出的三個點分別是(-3.612 6,51.898 8)、(-41.383 6,46.764 9)、(54.665 4,59.402 2)(單位 mm)。在求出這三個點之后,由于兩點就能確定一條直線,而且由幾何關系就可知道兩個不垂直于線陣天線面的剪式鉸就能保證線陣天線不隨意移動,因此,第三個剪式鉸可以看做是冗余約束。
3.2 整體結構的制造誤差計算
按照上述的方法用兩點確定線陣天線的位置。在CAD里累計誤差之后,如圖11所示,圖中的長直線表示不考慮誤差時的線陣天線軸線,而短直線表示考慮誤差之后的最大偏移位置。累加到1/4圓的最后一個單元時,原來的線陣天線對應于B、A、C的三個點分別為 B1(-344.954,393.345)、A1(-349.926,355.581)、C1(-337.282,451.622),累加之后分別變為B1(-343.072,399.348)、A1(-348.965,361.687)、C1(-333.581,457.335)。
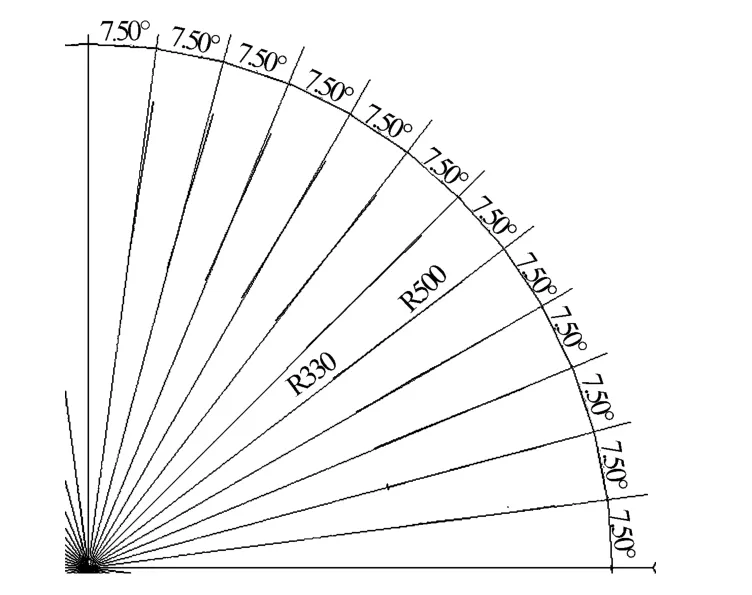
圖11 1/4結構線陣天線變化示意圖
4 結束語
本文對于一種單兵雷達可展結構進行了運動過程線陣天線位置的誤差分析,通過將線陣天線與剪式鉸中銷接孔和銷釘之間的間隙轉化為剪式鉸長度的變化,來推導線陣天線與原來位置的偏差,又通過誤差累加而得到了整體結構中線陣天線位置與原來位置的偏差。由本文的分析得出,在可展開結構中,銷接誤差的存在對于線陣天線位置的偏離有一定的影響,尤其是在考慮累計誤差之后,偏離位置較大,這就需要根據此類雷達陣面精度要求來判斷在這種誤差之下能否正常使用,至于誤差的降低,除了提高制造精度,減小鉸間隙,提高材料性能,減小長期使用之后的磨損以外,還可以考慮增加固定線陣天線的數量,或者是增加剪式鉸的數量,以增加多余約束。
[1] 錢 宣,孫為民,方紅梅.機載有源相控陣雷達天線陣面結構設計[J].現代雷達,2012,34(9):66-68.Qian Xuan,Sun Weimin,Fang Hongmei.Structural design of airborne active phased-array antenna[J].Modern Radar,2012,34(9):66-68.
[2] 陳升友.天基雷達大型可展開相控陣天線及其關鍵技術[J].現代雷達,2008,30(1):5-8.Chen Shengyou.Large deployable phased array antenna for space-based radar and its key techniques[J].Modern Radar,2008,30(1):5-8.
[3] 梁 輝,黃 順,郭 倫.一種冗余約束對并聯機構精度影響的研究[J].青島大學學報:工程技術版,2012,27(2):90-94.Liang Hui,Huang Shun,Guo Lun.Effect of redundant constraints on accuracy of parallel mechanism[J].Journal of Qingdao University:Engineering& Technology,2012,27(2):90-94.
[4] Jawale H P,Throat H T.Investigation of positional error in two degree of freedom mechanism with joint clearance[J].Journal of Mechanisms and Robotics,2012,4(1):18-24.
[5] Hayasaka Y,Okamoto N,Hattori T,et al.Analysis of nonlinear vibration of space apparatuses connected with pinjoints[C]//43rd Intemational Astronautical Congress.Washington:[s.n.]Press,1992:84-92.
[6] Moon F C,Li G X.Experimental study of chaotic vibrations in a pin-jointed space truss structure[J].AIAA Journal,1990,28(5):915-921.
[7] 黃鐵球,吳德隆,閻紹澤.帶間隙伸展機構的非線性動力學建模[J].中國空間科學技術,1999,19(1):7-13.Huang Tieqiu,Wu Delong,Yan Shaoze.Nonlinear dynamic modeling of deployable truss structures with clearances[J].Chinese Space Science and Technology,1999,19(1):7-13.
[8] 閻紹澤,葉 青,申永勝,等.間隙對空間可展結構動力學性能的影響[J].導彈與航天運載技術,2002(6):42-46.Yan Shaoze,Ye Qing,Shen Yongsheng,et al.Effect of clearances on dynamic performances of deployable structures for spacecraft[J].Missiles and Space Vehicles,2002(6):42-46.
[9] 閻紹澤.航天器中含間隙機構非線性動力學問題及其研究進展[J].動力學與控制學報,2004,2(2):48-52.Yan Shaoze.Development and problems of nonlinear dynamics of the mechanisms with clearances for spacecrafts[J].Journal of Dynamics and Control,2004,2(2):48-52.
[10] 閻紹澤,申永勝,陳洪彬.考慮桿件柔性和鉸間隙的可展結構動力學數值模擬[J].清華大學學報:自然科學版,2003,43(2):145-148.Yan Shaoze,Shen Yongsheng,Chen Hongbin.Dynamic performance of deployable structures with flexible members and clearance connections[J].Journal of Tsinghua University:Science& Technology,2003,43(2):145-148.
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現代企業(2015年9期)2015-02-28 18:56:50